

2.2 Классификация систем телеизмерений
Системы
телеизмерения (СТИ) можно классифицировать
по различным признакам. Наиболее
распространена классификация по
параметру, с помощью которого передается
значение измеряемой
величины по линии связи. 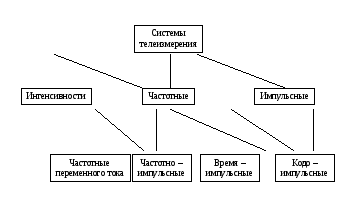
Рис. 2.1 – Классификация систем телеизмерения
Телеизмеряемые величины должны воспроизводиться на индикаторах в абсолютных значениях измеряемых величин. Это значит, что если передаваемая величина выражается в тоннах, то, несмотря на все промежуточные преобразования этой величины, неизбежные при передаче, индикатор на приемной стороне должен быть отградуирован в тоннах. Лишь в особых случаях допускается воспроизведение телеизмерений в процентах.
В частотно – импульсных системах применяется не частотная, а частотно – импульсная модуляция, по линии связи передаётся частотно – импульсный модулированный сигнал. Помехоустойчивость этого типа модуляции несколько выше по сравнению частотной модуляцией.
Во время – импульсных системах применяются время – импульсные методы модуляции, обеспечивающие чуть более высокую помехоустойчивость по сравнению с частотно – импульсной модуляцией.
В кодоимпульсных системах применяется кодоимпульсная модуляция. Сигнал постоянного тока датчика в устройстве контролируемого пункта преобразуется в кодовую комбинацию и каждый символ кодовой комбинации передаётся по линии связи в устройство пункта управления, где кодовая комбинация декодируется и отображается индикатором.
Кодоимпульсные системы обладают наибольшей точностью по сравнению с другими типами систем телеизмерения. В них не происходит уменьшение точности при передаче информационных сигналов на большие расстояния благодаря комплексу мер, применяемых для повышения помехоустойчивости телемеханической передачи. Поэтому точность кодоимпульсных систем телеизмерения определяется точностью датчика.
3 Описание структурной схемы устройства
Цифровые и кодоимпульсные системы ТИ отличает дискретная структура сигнала у, подаваемого в линию или в канал связи, не подчиняющаяся линейной зависимости от измеряемой величины А (см. рис.2.1).
Сигнал у, отображающий значение измеряемой величины А, в цифровых системах ТИ представляет собой кодовую комбинацию одного из используемых кодов.
Для преобразования
измеряемой величины в код непрерывная
функция времени А(t),
а точнее Х(t),
подвергается дискретизации по времени
и по уровню. Каждому дискретному уровню
Х присваивается свой порядковый номер,
который представляется в том или ином
коде. Через равные промежутки времени
 текущее значение параметра Х отожествляется
с ближайшим уровнем квантования Х,
кодируется и передаётся в приёмник. В
приёмнике производится дешифрация
принятого кода, т.е. определение посланного
номера уровня, по которому в выходном
приборе воспроизводится в той или иной
форме телеизмеряемая величина.
текущее значение параметра Х отожествляется
с ближайшим уровнем квантования Х,
кодируется и передаётся в приёмник. В
приёмнике производится дешифрация
принятого кода, т.е. определение посланного
номера уровня, по которому в выходном
приборе воспроизводится в той или иной
форме телеизмеряемая величина.
Рассмотрим принцип работы устройства КП (рис.3.1).
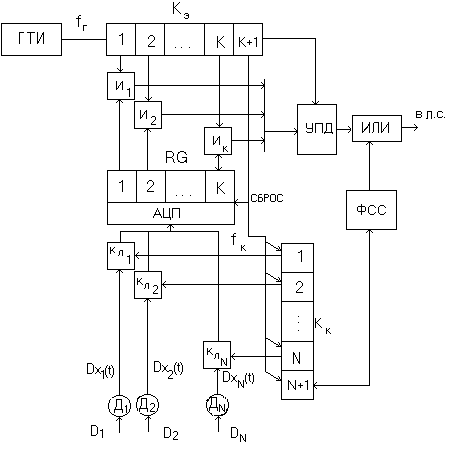
Рис. 3.1 - Структурная схема устройства контролируемого пункта цифровой системы телеизмерения
Структурная схема устройства контролируемого пункта цифровой системы телеизмерения (рис. 3.1) содержит следующие элементы:
ГТИ – генератор тактовых импульсов, вырабатывает импульсы для работы всего устройства.
Кэ – коммутатор элементов кода. Это функциональный блок, на вход которого поступают тактовые импульсы, а на выходным сигналом является сигнал логической единицы, последовательно появляющийся на выходах от 1 до К+1, где К – число разрядов кодовой комбинации.
И1, И2, Ик, Ив – схемы 2И – выходной сигнал равен логической единице при наличии логических единиц одновременно на двух входах.
RG – регистр памяти (параллельный регистр) – служит для хранения кодовой комбинации, поступающей на вход с АЦП.
АЦП – аналоговый цифровой преобразователь, преобразует входную аналоговую величину в цифровой код.
Кл1 – Клn – аналоговые ключи, имеют один выход и два входа. Первый вход управляющий, который разрешает подключение к выходу информационного сигнала, подаваемого на второй аналоговый вход.
D1 – Dn – аналоговые датчики телеизмерения величины.
Кк – коммутатор каналов, тоже что и Кэ с учётом замены величины К на N.
УПД – устройство повышения достоверности – кодер помехозащищённого кода. На входе двоичный код в последовательной форме, а на выходе код, способный обнаруживать или исправлять ошибки (помехозащищённый код) в последовательной форме.
ФСС – формирователь синхронизирующего сигнала. По входному сигналу вырабатывается синхронизирующий сигнал, отличающийся от информационного сигнала с выхода УПД, одним из трёх признаков:
полярностью;
длительностью;
числом единиц.
Элемент ИЛИ – служит для логического суммирования двух входных сигналов, выходной сигнал этого элемента поступает в линию связи.
Рассмотрим работу схемы в динамике. Пусть исходным будет состояние, когда коммутатор элементов кода Кэ находится в положении (к+1), а коммутатор каналов Кк находится в положении 1.
В этом состоянии коммутатор каналов Кк имеет логическую единицу на выходе позиции “1”. Она открывает Кл1 и сигнал с выхода датчика первого подключен к входу АЦП, который преобразует его в цифровой код и этот код записывается и хранится в регистре RG . С приходом следующего тактового импульса Кэ переходит с позиции “к+1” в позицию “1”. Поэтому на управляющий вход И1 поступает логическая единица и открывает схему И1, следовательно, символ из ячейки 1 регистра RG через элементы И1, УПД, ИЛИ поступает в линию связи.
На втором такте аналогично в линию связи поступает символ из ячейки 2 регистра RG. По истечении “К” тактов завершается посылка в линию связи информационной “К” разрядной кодовой комбинации. На “К+1” такте из УПД в линию связи сдвигается контрольный разряд помехозащищенного кода. Одновременно коммутатор каналов переходит на позицию 2, на которой через ключ 2 на вход АЦП поступает сигнал с датчика 2. Далее для второго канала все процессы повторяются аналогично первому. Таким образом, в линию связи последовательно передаётся информация по всем N каналам.
В позиции N+1 коммутатора каналов на вход ФСС поступает логическая единица, которая включает в работу формирователь синхросигнала. Синхронизирующий сигнал через схему ИЛИ поступает в линию связи.