

КУРСОВЫЕ_ТАУ / ВВЕДЕНИЕ_В ТАУ
.docx
Введение в ТАУ
Теоретическую оценку качества работы системы автоматического регулирования проводят на ее математической модели. Одной из форм математической модели является структурная схема, на которой система регулирования представлена в виде соединения элементов, описываемых передаточными функциями.
Понятие передаточной функции связано с преобразованием Лапласа. Применив это преобразование, при нулевых начальных условиях, к дифференциальному уравнению динамики элемента (системы)
 (1)
(1)
где y
– выходная величина, x1
и x2
– входные
величины, получим выражение
 или
или

где Y(s), X1(s), X2(s) – изображения величин y, x1, x2 по Лапласу, s – комплексная переменная, W1(s) и W2(s) – передаточные функции, являющиеся отношениями изображений выходной и входной величин. Такое же выражение передаточной функции, с точностью до обозначения аргумента («р» вместо «s»), получается, если в дифференциальном уравнении сделать замену d/dt = p и, выразив величину «y», записать уравнение в «нормализованной» операторной форме:
|
|
(2) |

В этой форме записи передаточная функция – это символическая запись выполняемого элементом преобразования входной величины в выходную величину. В литературе, при записи передаточных функций, используют оба символа: р и s.
Уравнению (2) соответствует структурная схема элемента, показанная на рис.1. Соединяя соответствующие входы и выходы элементов, получают структурную схему всей системы.

Передаточную функцию конкретного элемента получают, пользуясь дифференциальными уравнениями динамики элемента, или его динамическими характеристиками, снятыми экспериментально. Дифференциальное уравнение составляется на основании знания принципов работы элемента. При построении математической модели элемента по экспериментальным данным, элемент представляют соединением типовых динамических звеньев, параметры которых определяют по переходным или частотным характеристикам элемента.
Переходная характеристика – это график изменения во времени выходной величины элемента при подаче на его вход «единичного» ступенчатого воздействия.
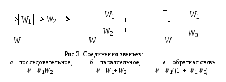
В системах автоматического регулирования используется, как правило, принцип управления по отклонению регулируемой величины от заданного значения. Элементы такой системы образуют замкнутый контур. Любая переменная в контуре может рассматриваться и как входная, и как выходная величина. Пример структурной схемы приведен на рис.2.
Формулы (3, 4) устанавливают зависимость регулируемой переменной (y) и ошибки регулирования (e) от задающего (g) и возмущающего (f) воздействий. Эти формулы составляются по следующему правилу.
Передаточная функция «замкнутой» системы с отрицательной обратной связью, устанавливающая зависимость «выходной» величины от «входной» величины, есть дробь, числитель которой – произведение передаточных функций звеньев, составляющих цепь от «входа» до «выхода» по направлению передачи сигнала, знаменатель – единица плюс передаточная функция разомкнутой системы. Передаточной функцией разомкнутой системы называют произведение передаточных функций всех звеньев, составляющих контур управления, включая звено обратной связи. В рассматриваемом примере это функция W = W1W2W0.
Чтобы определить зависимость выходной величины элемента (системы) от входного воздействия в статическом режиме, когда входные и выходные величины приняли постоянные значения и их производные равны 0, в соответствующей передаточной функции следует сделать подстановку р = 0. Чтобы определить значение выходной величины в момент подачи на вход элемента ступенчатого воздействия, в передаточной функции следует сделать подстановку р = ∞.
При преобразованиях структурной схемы используют правила, показанные на рис.3.
В общем случае динамика линейной системы описывается дифференциальным уравнением в обычной (5) или операторной (6) форме:
|
|
(5)
(6) |

где x(t) y(t) – отклонения входной и выходной величин от их номинальных значений, соответствующих состоянию равновесия системы. Уравнению (6) соответствует передаточная функция
|
|
(7) |

При отсутствии внешних воздействий (х = 0) и ненулевых начальных условиях в системе происходит «собственное» движение, являющееся решением дифференциального уравнения с нулевой правой частью
|
|
(8) |

Первым требованием к системе регулирования является ее устойчивость, т.е. способность возвращаться в состояние равновесия после снятия внешних воздействий. В устойчивой системе собственное движение затухающее, колебательное или апериодическое. Вид собственного движения зависит от корней характеристического уравнения (9):
|
|
(9) |

Система устойчива, если все действительные корни уравнения (9) отрицательны, а все комплексные корни имеют отрицательные действительные части. При комплексных корнях собственное движение имеет колебательную составляющую.
Динамика системы, показанной на рис. 2, описывается уравнением (3), которое можно представить в форме (10):
|
|
(10) |

где W(p) – передаточная функция разомкнутой системы. Собственное движение системы – решение уравнения
|
|
(11) |
 .
.В общем случае передаточная функция элемента (системы) является отношением многочленов относительно р: W(p)=K(p)/D(p). Поэтому характеристическое уравнение 1+W(p) = 0 эквивалентно уравнению D(p)+K(p) = 0: характеристическое уравнение замкнутой системы можно получить, приравняв к 0 сумму числителя и знаменателя передаточной функции разомкнутой системы.
Устойчивость системы можно исследовать, используя критерий Рауса-Гурвица. Согласно этому критерию, система устойчива, если все коэффициенты характеристического уравнения (9) строго положительны (нулевые коэффициенты не допустимы) и выполняются следующие условия:
|
- для системы третьего порядка |
a1a2 – a0a3 > 0 , |
(12) |
|
- для системы четвертого порядка |
a3(a1a2 – a0a3) – a4a12 > 0 |
(13) |
(системы более высокого порядка при выполнении курсовой работы не рассматриваются).
В
качестве примера получим условие
устойчивости системы, описываемой
моделью порядка 3 (рис.4). Передаточная
функция этой системы в разомкнутом
состоянии является произведением
передаточных функций интегрирующего
и двух апериодических (инерционных)
звеньев с постоянными времени Т
и Т1.
Характеристическое уравнение

Условие устойчивости
 (14)
(14)
Неравенство (14) определяет границу устойчивости по параметру k. Для того, чтобы качество регулирования было высоким, необходим «запас» устойчивости: параметры системы должны выбираться достаточно далеко от границы устойчивости.
Качество регулирования оценивают по виду переходной характеристики регулируемой величины (y) при «единичном» ступенчатом входном воздействии: задающем (g) или возмущающем (f). По этой характеристике определяют длительность переходного процесса (tp), перерегулирование (σ) или максимальную динамическую ошибку (δ), статическую ошибку (εст) – см. рис. 5.
|
δ ест g y ±5% ест tp tp f y t t σ Рис.5. Переходные характеристики 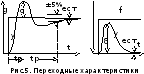
|























описать
динамику системы дифференциальным
уравнением второго порядка. Корни
характеристического уравнения второго
порядка находятся элементарно. В системе,
показанной на рис. 4, такое упрощение
возможно, если T1<<T.
При T1
= 0 получим характеристическое уравнение
 Если дискриминант уравнения отрицательный
(kT>0,25),
корни уравнения p1,2
комплексно-сопряженные,
собственное движение
y(t)
колебательное:
Если дискриминант уравнения отрицательный
(kT>0,25),
корни уравнения p1,2
комплексно-сопряженные,
собственное движение
y(t)
колебательное:

Значения С, φ зависят от начальных условий. Для оценки качества переходного процесса системы второго порядка ее характеристическое уравнение общего вида (15) приводят к эквивалентной стандартной форме характеристического уравнения колебательного звена (16):
|
|
(15) |
|
(16) |
|
|
|
|
|||

 ,
,

где Тэ – постоянная времени, ξэ – параметр затухания колебаний (ξэ < 1). Длительность переходного процесса tр≈ 3Tэ/ ξэ, период колебаний Ткол≈ 2πТэ, зависимость перерегулирования σ от ξэ приведена в таблице 1.
Т а б л и ц а 1
|
|
0,05 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
|
,% |
85 |
72 |
52 |
37 |
25 |
16 |
9,5 |
4,6 |
1,5 |
0,2 |
Чтобы определить статическую ошибку системы регулирования, записывают передаточную функцию, устанавливающую зависимость ошибки (е) от внешнего воздействия, задающего (g) или возмущающего (f), см. рис.2, и делают подстановку р = 0.