

4. Определение времени неустановившегося движения (времени пуска, времени торможения) и пути, пройденного при этом электроприводом.
Пример Требуется ориентировочно оценить время разбега вхолостую (Мс=0) АД, имеющего характеристику, показанную на рис.4.1 , и следующие технические данные: скорость идеального холостого хода 0=314 рад/с; пусковой момент Мп=80 Нм; максимальный (критический) момент Мк=120 Нм; момент инерции ротора J=0,2 кгм2.
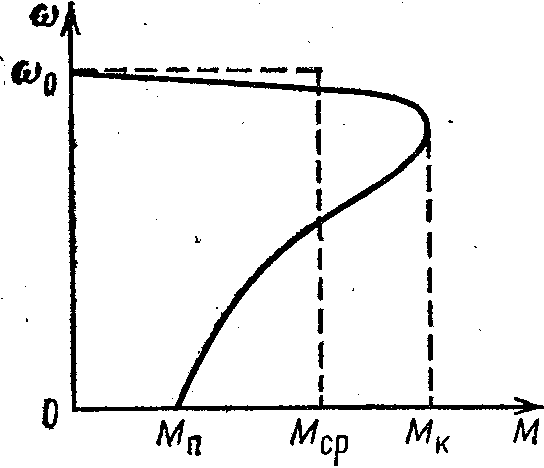
Рис.4.1.
Точное определение времени разбега АД с показанной нелинейной характеристикой связано с определенными трудностями. Если же ограничиться лишь оценкой этого времени,
то задача упрощается и решается следующим образом. Реальная характеристика двигателя (М) заменяется прямоугольной, как это показано на рис. 4.1 штриховой линией. Средний момент Мср, определяемый обычно как полусумма пускового Mп и критического Мк моментов, т. е. Мср = (Mп + Мк)/2, принимается за время разбега двигателя неизменным. Тогда справедливы все выводы этого параграфа и время разбега tразб= tп.п определится по (1.26)
tразб= tп.п = J(о - 0)/(Мср - 0) = 0,2314/100 = 0,63 с.
Аналогичные расчеты могут быть выполнены для нелинейных механических характеристик и других видов переходных режимов: торможения, реверса, переходе с характеристики на характеристику.
5. Механические и электромеханические характеристики двигателя постоянного тока независимого возбуждения
Напряжение Uя (В), приложенное к якорю, в установившемся режиме уравновешивается ЭДС Е (В), наведенной в якоре (ее называют также противоЭДС), и падением напряжения в якорной цепи
Uя = Е + Iя(Rя+Rд), (5.1)
где Rя – сопротивление якорной цепи двигателя, Ом, включающее сопротивления обмотки якоря, щеточного контакта, дополнительных полюсов и компенсационной обмотки; Rд – добавочное сопротивление.
ЭДС машины определяется соотношением
Е= сФд, (5.2)
здесь конструктивный коэффициент
с = рN/ 2а,
р – число пар полюсов;
N – число активных проводников обмотки якоря;
а – число пар параллельных ветвей обмотки якоря;
Ф – магнитный поток, Вб, создаваемый обмоткой возбуждения или постоянными магнитами.
Подставляя выражение (5.2) для Е в уравнение (5.1) и решая его относительно д, получим:
д
=
![]() .
(5.3)
.
(5.3)
Это уравнение устанавливает связь между частотой вращения и током якоря д = f(Iя) и называется электромеханической характеристикой двигателя.
Электромагнитный момент двигателя (Нм), определяется током якоря и магнитным потоком:
М = сФIя. (5.4)
Момент на валу двигателя меньше электромагнитного на значение, определяемое потерями в стали и механическими потерями. Для инженерных расчетов этими потерями можно пренебречь, и принять, что момент на валу равен электромагнитному моменту. Тогда, определив ток якоря и подставив его , получим уравнение механической характеристики двигателя:
д
=
![]() .
(5.5)
.
(5.5)
Полученные выражения для характеристик двигателя представляют собой уравнение прямой. Они справедливы, если пренебречь реакцией якоря.
В уравнениях (5.4), (5.5) первое слагаемое представляет собой угловую скорость идеального холостого хода (при этом ток якоря и момент равны 0)
0
=
![]() .
(5.6)
.
(5.6)
Второй член в этих уравнениях характеризует статическое падение угловой скорости от нагрузки
![]() или
или
![]() (5.8)
(5.8)

На рис. 6 падение скорости показано для номинального значения момента Mном (тока Iном). При неизменном магнитном потоке момент и ток якоря, как следует из соотношения пропорциональны. Поэтому механическая и электромеханическая характеристики двигателя (см. рис.) отличаются только масштабом по оси ординат. Характеристика, полученная при номинальном значении напряжения на якоре Uном, номинальном магнитном потоке Фном и отсутствие внешних резисторов в якорной цепи, называется естественной. Жесткость естественной характеристики определяется только сопротивлением якорной цепи двигателя:
![]() или
или
![]() .
(5.9)
.
(5.9)