

Раздел 5. Эксплуатация орудий промышленного рыболовства.
5.1. Флот рыбной промышленности.
Изучение флота легче начинать с его классификации. Классификаций много, т.к. многие факторы могут лечь в их основу. Ниже приводится система классификаций только судов промыслового флота.
По наличию движителя: суда самоходные и несамоходные.
По типу главного двигателя (ГД): пароходы, паротурбоходы, газотурбоходы, теплоходы, дизельэлектроходы.
По назначению: суда добывающие, обрабатывающие, транспортные и вспомогательные.
По типу главного орудия лова: траулеры, сейнеры, дрифтеры и ярусники.
По главной технологии обработки добытого сырья: суда свежьевые, посольные, морозильные, консервные и мукомольные.
По длине судна между перпендикулярами: супер (более 100 м.), большие (от 65 до 100 м.), средние (от35 до 65 м.), малые (от 25 до 35 м.) и маломерные (менее 25 м.).
Некоторые классификационные признаки входят в буквенно-цифровой код судна, который применяется для краткого и быстрого распознавания судов. О размере судна можно судить по букве «С», стоящей в конце буквенной части кода, если это супер судно, или буквы «Б», «С», «М», «Мм», стоящие в начале буквенной части кода, если это большое судно, среднее, малое или маломерное. Буквы «М», «К», «Св» или «Пс», если судно имеет главные технологии морозильный, консервный, свежевой или посольный. Буквы «Т», «С», «Д» или «Я», если судно является траулером, сейнером, дрифтером или ярусником. В цифровой части кода приводится мощность ГД в кВт и номер проекта. Суда отечественной постройки имеют номер проекта цифровой, постройки ГДР – номер проекта содержит букву «А», польской постройки – букву «В». Суда постройки других государств содержат только название головного судна. Например, РКТ-С – 5300 пр. А-488 типа «Моонзунд» - означает: рыболовный консервный траулер, длиной между перпендикулярами более 100 м., немецкой постройки по проекту 488, головное судно называлось «Моонзунд» мощность ГД – 5300 кВт. Или БМРТ – 5150 пр. 1288, означает: большой морозильный рыболовный траулер, мощность ГД 5150 кВт, построен в Николаеве по проекту 1288, головное судно называлось «Пулковский меридиан». На практике встречаются неправильные обозначения судов. Например, СЧС – 225, что якобы означает средний черноморский сейнер, мощностью 225 л.с. Правильно называть это судно МмС – 165 пр. 1330, т.к. размер этого судна по перпендикулярам 23 м., т.е. маломерное, а не среднее, слово – черноморский не является классификационным признаком, т.к. эти суда работают и в Азовском море и даже у Африки.
Добывающие суда флота Украины представлены следующими типами.
Супер суда: РКТ-С – 5300 пр.А-488 типа «Моонзунд», РКТ-С – 5150 пр. 16080 типа «Антарктида», РКТ-С – 5560 типа «Наталья Ковшова».
Большие суда: БМРТ – 5150 пр. 1288 типа «Пулковский меридиан», БМРТ – 2210 типа «Рембрандт», БМРТ – 2850 типа «Прометей», БМРТ – 1710 типа «Атлантик».
Средние суда: СТМ – 1770 пр. А-333 типа «Орленок», СРТМ – 735 пр. 502 и их модификации типов «Маяк».
Малые суда: МРТР – 590 пр. 1296 типа «Гируляй», МРТР – 225 пр.1282 типа «Карелия», МРС – 225 пр. 388.
Маломерные суда: МмРТР – 220 пр.1328 типа «Балтика», МмРС – 165 пр. 1330 типа «Керчанин».
5.2. Элементы коммерческой эксплуатации флота.
Для оценки эффективности эксплуатации орудий лова необходимо в рамках настоящего конспекта привести некоторые элементы из теории коммерческой эксплуатации флота. Оценку эффективности коммерческой эксплуатации флота осуществляют по показателям и измерителям. Здесь мы рассмотрим показатели, и измерители использования флота по времени.
Первое время – это календарное время tК.
tK = NССп*365 (55), где NССп – число судов данного типа среднесписочное. NССп = (N1*365+N2*A-N3*B)/365, (56) где N1 – число судов на 01.01., N2 – число судов, приобретенное в течение года, N3 – число судов, списанное в течение года, А – число суток до конца года от момента приобретения судна, В – число суток до конца года от момента списания судна.
Календарное время делится на время в эксплуатации и время вне эксплуатации. tЭ = tK – tВЭ (57).
Время вне эксплуатации – это время в ремонте или ожидания ремонта. Время эксплуатационное делится на время в порту и на время в море.
tЭ = tМ + tП (58).
Время в море делится на время ходовое и время промысловое
tМ = tПР + tХ (59)
Время промысловое делится на время на лову и время работы у судов приемотранспортных и судов снабжения tПР = tЛ + tПТС (60)
Все перечисленные времена – это показатели, которые имеют размерность – сутки. Все вышеприведенное можно проиллюстрировать рис. 36
Размерные показатели не всегда хорошо характеризуют эффективность использования судов по времени. Гораздо лучше эту функцию выполняют безразмерные измерители, представляющие собой отношения показателей. Так отношение эксплуатационного времени к календарному, показывает насколько хорошо эксплуатируют суда члены экипажа и насколько хорошо у судовладельца организован ремонт судов. КЭ = tЭ/ tК = 1 – tВЭ/ tК (61).
Коэффициент морского времени показывает, насколько хорошо организовано обслуживание судов в порту. КМ = tМ/ tЭ = 1 – tП/ tЭ (62)
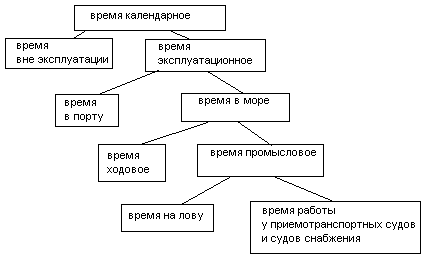
Рис. 36. Структура времени использования судов.
Коэффициент промыслового времени показывает, насколько эффективно использует судовладелец иностранные порты, ближайшие к району промысла, для базирования своих судов. КПР = tПР/ tМ = 1 – tХ/ tМ (63)
Коэффициент времени на лову показывает, насколько хорошо организовано обслуживание судов в районе промысла КЛ = tЛ/ tПР = 1 – tПТС/ tПР (64)
Коэффициент экстенсивности показывает, какую долю от календарного времени составляет время на лову, в течение которого создается товарная продукция. КЭКС = tЛ/ tК (65)
Время лова, в свою очередь, имеет сложную структуру. В него входит: время местного поиска, маневрирование судном в точку отдачи орудия лова, время отдачи орудия лова, самого процесса лова, время выборки орудия лова, время выливки улова и времени подготовки судна и орудия лова к следующему циклу. Как видим, время непосредственно лова занимает незначительную часть от календарного времени. Повышение эффективности промысла гидробионтов имеет два пути: повышение эффективности процессов лова и увеличение доли времени лова в календарном времени. Обе эти задачи и есть основные цели членов судовых экипажей и всех специалистов, причастных к промыслу.
5.3. Тяговые характеристики судов.
Основным орудием промышленного рыболовства в настоящее время является трал. Технические характеристики тралов находятся в прямой зависимости от тяговых характеристик траулеров, поэтому очень важно изучить природу тяги и методы ее определения.
Из теории судна известно, что при установившемся движении тяга траулера есть разница между упором винта и сопротивлением корпуса.
PP = Pe – RK (66), где PP – располагаемая тяга, кН, Pе – упор винта, кН, RK – сопротивление корпуса, кН.
На судне упор винта должен быть управляемым и реверсируемым. Происхождение упора винта – это происхождение подъёмной силы крыла. Лопасть винта движется под каким-то углом атаки в воде, при этом на поверхности лопасти, обращенной к корме (на переднем ходу), образуется пониженное гидродинамическое давление, а на противоположной поверхности – повышенное. Со стороны повышенного в сторону пониженного давления действует сила, которую называют полной гидродинамической реакцией. Эту реакцию можно разложить в поточной ортогональной системе координат (ось Х ориентирована по вектору скорости) на составляющие RY и RX, причем сила RY параллельна оси гребного вала, а RХ – перпендикулярна ей. Из подъёмных сил всех лопастей складывается упор винта, а из сил сопротивления с плечом радиуса центра давления получается момент сопротивления вращению винта.
Pe
=
![]() (67)
(67)
RY
= CY![]()
![]() (2)
(2)
Из (2) и (67) видно, как можно управлять тягой. В (2) управляемыми параметрами могу быть только коэффициент подъёмной силы и скорость. Поэтому на практике существует две различные конструкции винта: ВФШ и ВРШ. ВФШ – это винт фиксированного шага, у которого лопасти установлены под каким-то постоянным углом атаки и отлиты как одно целое со ступицей. В этом случае коэффициент подъёмной силы является постоянным, а управляющим параметром является только скорость. В (2) скорость линейная, она равняется
V = ω*R (68), где ω – угловая скорость, 1/с, а R радиус центра давления от оси гребного вала, м.
ω = 2π*nC (69), где nC – частота вращения винта, об/с.
Следовательно, управление упором ВФШ есть управление частотой вращения винта. Управление частотой вращения винта осуществляется путем изменения цикловой подачи топлива в цилиндры дизеля (если траулер – теплоход).
Реверс тяги в этом случае осуществляется запуском двигателя в обратную сторону вращения коленвала. Преимущества ВФШ: простота, надежность, дешевизна. Недостатки: для траулера винт является компромиссной конструкцией между скоростным и упорным винтами, реверс тяги – через стоп и запуск двигателя на обратный ход. Последний недостаток очень серьёзный, т.к. двигатель на обратный ход можно запустить только на скорости 0.6VПХ и, если судно шло полным ходом, то надо ждать, когда за счет сопротивления корпуса судна скорость снизится до указанного значения, а это большое время и расстояние, в этом одна из причин столкновений судов в море.
Второй конструкцией винта является винт регулируемого шага ВРШ, у которого, чаще всего, частота вращения является постоянной величиной, а переменной – коэффициент подъёмной силы Cy.
Рис. 37. Зависимость коэффициента подъёмной силы от угла атаки α.
У ВРШ лопасти могут разворачиваться относительно ступицы и изменять угол атаки от нулевого упора до полного вперед и назад без изменения направления вращения коленвала ГД. Такой винт является более сложным, более дорогим, менее надёжным, но зато имеет быстрый реверс тяги и регулируемый в широких пределах упор. Есть еще одно преимущество ВРШ – постоянство частоты вращения коленвала позволяет использовать валогенераторы, т.е. использовать для выработки электроэнергии самую экономичную машину на судне – ГД.
В опытах с винтами отмечено, что на швартовых испытаниях равному приращению мощности, подводимой к винту, соответствует неравное приращение упора винта. Следовательно, можно записать
Pe = A1Ne – A11Ne2 (70)
Если во время швартовых испытаний при каком-то значении мощности, подводимой к винту, разрубить швартовый конец, то судно начнет двигаться сначала ускоренно, а затем при достижении равенства между упором винта и сопротивлением корпуса, равномерно. При начале движения судна упор винта, достигнутый при швартовых испытаниях, не останется постоянным, а будет снижаться, причем снижаться нелинейно. Это объясняется тем, что при движении судна поток воды будет влиять на поверхности разряжения лопастей винта, уменьшая разницу давлений между поверхностью нагнетания и поверхностью разряжения. Тогда можно записать, что при скорости судна отличной от нуля
Pe = A1Ne – A11Ne2 – A12NeV – A122NeV2 (71)
Теперь можно рассмотреть вторую составляющую зависимости (66) – Rк – сопротивление корпуса.
Rк = Rк1 + Rк2 + Rк3 (72)
Rк1
=μ![]() (73)
– сопротивление вязкого трения, где μ
– коэффициент динамической
вязкости воды,
(73)
– сопротивление вязкого трения, где μ
– коэффициент динамической
вязкости воды,
![]() - градиент скорости воды в пограничном
слое,S
– площадь смоченной поверхности корпуса
судна.
- градиент скорости воды в пограничном
слое,S
– площадь смоченной поверхности корпуса
судна.
Rк2
= Cx1![]() (74)
– сопротивление формы, где Cx1
= f(
(74)
– сопротивление формы, где Cx1
= f(![]() )L,B,T
– длина, ширина и осадка корпуса судна,
α,β,γ и δ коэффициенты полноты корпуса
судна.
)L,B,T
– длина, ширина и осадка корпуса судна,
α,β,γ и δ коэффициенты полноты корпуса
судна.
Rк3
= Cx2![]() (75) – волновое сопротивление,
где Cx2
= f(Fr)/
(75) – волновое сопротивление,
где Cx2
= f(Fr)/
В (74) и (75) F – площадь мидель шпангоута, в (75) Fr – число Фруда.
Таким образом, из (73 – 75) видно, что сопротивление корпуса движению в воде содержит члены, в которых скорость входит в первой и во второй степенях, что можно описать:
Rк = А2V + A22V2 (76) или вместе с (71) получим
Рр = A1Ne – A11Ne2 – A12NeV – A122NeV2 - А2V - A22V2 (77)
Зависимость (77) можно представить в несколько ином виде с учетом следующих обстоятельств: в ней содержатся члены, содержащие V – два раза, и содержащие V2 – два раза, их можно рассматривать как подобные. Второе – у судов с ВРШ, а крупные траулеры имеют только такие винты, при нулевом упоре расходуется довольно значительная мощность, затрачиваемая на вращение гребного вала и винта. Эту мощность можно рассчитать:
Neрассч. = (2πρK2n3D5)10-3+(1-ηВП)NeГД ном (78)
где ρ – плотность морской воды, кг/м3,
K2 – гидродинамический коэффициент винта момента и мощности (для отечественных и зарубежных ВРШ при нулевом упоре K2 = 0.005 – для свободных винтов и K2 = 0.007 – для винтов в насадках),
n – число оборотов винта в сек,
D – диаметр винта, м,
ηВП – КПД валопровода (в расчетах можно принять ηВП = 0.97),
NeГД ном номинальная мощность ГД, кВт.
С учетом сказанного зависимость располагаемой тяги от мощности, пошедшей на винт и скорости можно записать в виде:
Рр = A1 Ne – A11Ne2 – A2V – A22V2 – А0 (79)
Зависимости располагаемых тяг некоторых судов в форме (79) приведены ниже.
Для судов типа «Атлантик»
Pp = 0.4194Ne – 1.0747*10-4Ne2-5.846V – 0.794V2 – 180.2 (80)
Для судов типа «Прометей»
Pp = 0.3369Ne – 4.5*10-5Ne2-20.75V – 0.41V2 – 157.4 (81)
Для судов пр. А-333 типа «Орленок»
Pp = 0.462Ne – 1.223*10-4Ne2-5.2634V – 0.891V2 – 194.7 (82)
Для судов пр. 1288 и 16080 типов «Пулковский меридиан» и «Антарктида»
Pp = 0.2616Ne – 2.535*10-5Ne2-18.05V – 0.6366V2 – 142.7 (83)
Для судов пр. А-488 типа «Моонзунд»
Pp = 0.483Ne – 5.1*10-5Ne2-14.76V – 1.7759V2 – 481.7 (84)
Для судов пр. 1330 типа «Керчанин»
Pp
= 0.6773![]() e
– 2.575*10-3
e
– 2.575*10-3![]() e2
-0.3V
– 0.3239V2
– 10.4 (85)
e2
-0.3V
– 0.3239V2
– 10.4 (85)
По зависимостям (80 – 85) построены графики (см. рис. 38 – 43)

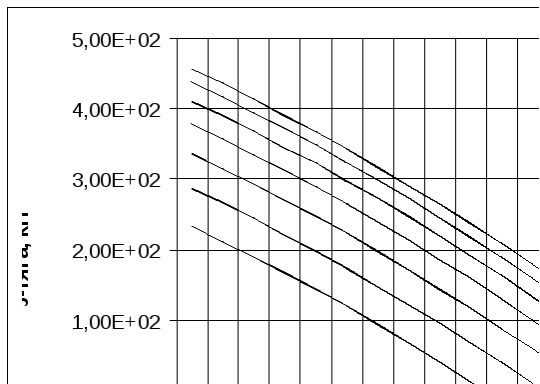 Рис.
38. Располагаемая тяга судов типа
«Атлантик»
Рис.
38. Располагаемая тяга судов типа
«Атлантик»
Рис. 39. Располагаемая тяга судов типа «Прометей».
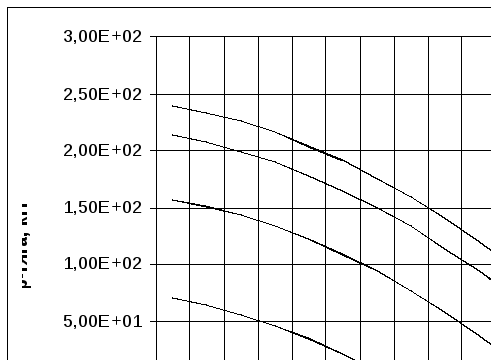
Рис. 40. Располагаемая тяга судов типа «Орлёнок»

Рис. 41. Располагаемая тяга судов типа «Пулковский меридиан».
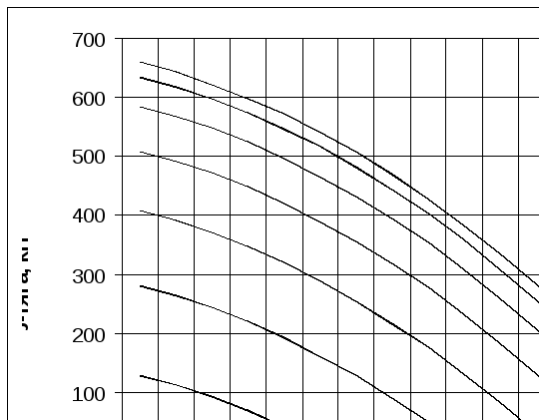
Рис. 42. Располагаемая тяга судов типа «Моонзунд».
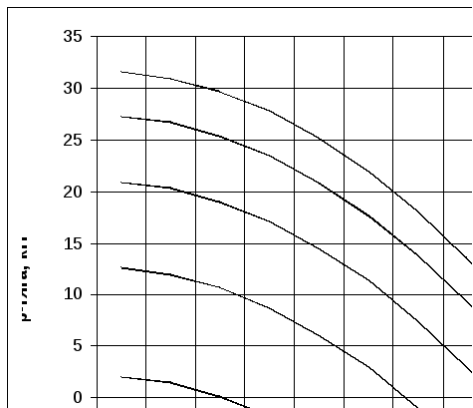
Рис. 43. Располагаемая тяга судов пр. 1330 типа «Керчанин».
На рис. 38 – 43 показаны серии кривых, которые соответствуют разным мощностям, пошедшим на винт, на всех рисунках счет кривым идет сверху вниз. Информация о мощностях сведена в таблицу 6.
Таблица 6. Расшифровка данных рис. 38 – 43.
|
№ рис |
№ кривой |
Мощность на винт, кВт |
№ рис |
№ кривой |
Мощность на винт, кВт |
|
38 |
1 |
1877 (110%) |
41 |
1 |
4000 |
|
2 |
1706 (100%) |
2 |
3500 | ||
|
3 |
1535 (90) |
3 |
3000 | ||
|
4 |
1365 (80) |
4 |
2500 | ||
|
5 |
1195 (70) |
5 |
2000 | ||
|
6 |
1025 (60) |
6 |
1500 | ||
|
7 |
853 (50) |
7 |
1000 | ||
|
39 |
1 |
3140 (110%) |
42 |
1 |
4500 |
|
2 |
2853 (100) |
2 |
4000 | ||
|
3 |
2570 (90) |
3 |
3500 | ||
|
4 |
2290 (80) |
4 |
3000 | ||
|
5 |
2000 (70) |
5 |
2500 | ||
|
6 |
1700 (60) |
6 |
2000 | ||
|
7 |
1430 (50) |
7 |
1500 | ||
|
40 |
1 |
1765 (100%) |
43 |
1 |
100% |
|
2 |
1410 (80) |
2 |
70% | ||
|
3 |
1060 (60) |
3 |
50% | ||
|
4 |
705 (40) |
4 |
40% | ||
|
|
5 |
20% | |||
В зависимостях (80 – 84) в качестве аргумента входит мощность, пошедшая на винт Ne. Она рассчитывается по зависимости
Ne
= NeГД
-
![]() (86)
(86)
где NeГД – размерная мощность ГД,
NВГ – мощность, отбираемая валогенератором,
ηВГ – КПД валогенератора.
Размерная мощность ГД определяется по зависимости
NeГД
= NeГД
НОМ*![]() eГД/100%
(87)
eГД/100%
(87)
Из сказанного видно, что
для точного определения Рр необходимо
точно определять
![]() eГД.
Необходимо отметить, что прямых методов
определения относительной мощности,
развиваемой ГД, не существует, все
современные методы основаны на измерении
косвенных характеристик. Косвенные
характеристики не равноценны. На крупном
судовом дизеле измеряются десятки
косвенных характеристик, из которых
необходимо выделить как важнейшие те
характеристики, которые характеризуют
процесс сгорания топлива в цилиндрах.
Сюда можно отнести температуру выхлопных
газов сразу за цилиндрами (tГ),
избыточное давление наддува (РН),
максимальное давление в цилиндре в
процессе сгорания (РZ)
и часовой расход топлива (G).
В книге Левшина Г.Ф. [1] введено понятие
о коэффициенте информативности косвенных
характеристик. В таблице 7 приведены
значения коэффициентов информативности
для некоторых косвенных характеристик.
eГД.
Необходимо отметить, что прямых методов
определения относительной мощности,
развиваемой ГД, не существует, все
современные методы основаны на измерении
косвенных характеристик. Косвенные
характеристики не равноценны. На крупном
судовом дизеле измеряются десятки
косвенных характеристик, из которых
необходимо выделить как важнейшие те
характеристики, которые характеризуют
процесс сгорания топлива в цилиндрах.
Сюда можно отнести температуру выхлопных
газов сразу за цилиндрами (tГ),
избыточное давление наддува (РН),
максимальное давление в цилиндре в
процессе сгорания (РZ)
и часовой расход топлива (G).
В книге Левшина Г.Ф. [1] введено понятие
о коэффициенте информативности косвенных
характеристик. В таблице 7 приведены
значения коэффициентов информативности
для некоторых косвенных характеристик.
Таблица 7. Коэффициенты информативности косвенных характеристик.
-
Косвенные характеристики
Коэффициент
информативности
Виброакустический метод
2.516
Обороты коленвала (для ВФШ)
2.43
Часовой расход топлива G, кг/час
1.48
Температура выхлопных газов tГ
1.48
Максимальное давление сгорания PZ
1.4
Давление наддува РН
0.825
Из табл. 7 видно, что определение относительной мощности ГД по одной косвенной характеристике дает не высокий коэффициент информативности, который можно повысить, используя две, три или четыре косвенных характеристики.
Нами была собрана статистика по ходовым испытаниям дизелей целого ряда траулеров. По этой статистике получены эмпирические зависимости относительной мощности ГД от косвенных характеристик, которые приведены ниже.
На судах типа «Атлантик» в качестве ГД установлена пара дизелей типа 8NVD48A-2U номинальной мощностью 853 кВт при n= 375 об/мин для них:
![]() e=0.368tГ-47.6
(87)
e=0.368tГ-47.6
(87)
![]() e=290.37
PH
+11.1 (88)
e=290.37
PH
+11.1 (88)
![]() e=0.567G-5.1
(89)
e=0.567G-5.1
(89)
![]() e=0.184tГ
+147.2PH-18.3
(90)
e=0.184tГ
+147.2PH-18.3
(90)
![]() e=0.12tГ
+96.8PH+0.189G-13.6
(91)
e=0.12tГ
+96.8PH+0.189G-13.6
(91)
На судах типа «Прометей» в качестве ГД устанавливались дизеля типа 8ZD72/48 AL-1 номинальной мощностью 2853 кВт при n=214 об/мин для них:
![]() e=0.428tГ
-58.6
(92)
e=0.428tГ
-58.6
(92)
![]() e=105.96PH
+3.14
(93)
e=105.96PH
+3.14
(93)
![]() e=2.47PZ
-96.8
(94)
e=2.47PZ
-96.8
(94)
![]() e=0.173G-3.86
(95)
e=0.173G-3.86
(95)
![]() e=0.1427tГ
+35.32PH-50.7
(96)
e=0.1427tГ
+35.32PH-50.7
(96)
![]() e=0.107tГ
+26.49PH+0.618PZ-39
(97)
e=0.107tГ
+26.49PH+0.618PZ-39
(97)
На судах типа «Моонзунд» в качестве ГД устанавливались дизеля типа 6VDS48/42 AL-2 номинальной мощностью 2х2648 кВт при n=500 об/мин для них:
![]() e=0.762tГ
-208.5
(98)
e=0.762tГ
-208.5
(98)
![]() e=0.546PH+12.4
(99)
e=0.546PH+12.4
(99)
![]() e=11.678PZ-33.5
(100)
e=11.678PZ-33.5
(100)
![]() e=0.206G-11.7
(101)
e=0.206G-11.7
(101)
![]() e=0.092tГ
+0.48PH-14.5
(102)
e=0.092tГ
+0.48PH-14.5
(102)
![]() e=0.079tГ
+0.457PH+0.73PZ-13.5
(103)
e=0.079tГ
+0.457PH+0.73PZ-13.5
(103)
На судах пр. 1288 и 16080 типов «Пулковский меридиан» и «Антарктида» в качестве ГД устанавливалась пара дизелей типов 6ЧН40/46 номинальной мощностью 2х2574 кВт при n= 520об/мин для них:
![]() e=0.646tГ
-175.5
(104)
e=0.646tГ
-175.5
(104)
![]() e=44.54PН
+30 (105)
e=44.54PН
+30 (105)
![]() e=1.115PZ-35.9
(106)
e=1.115PZ-35.9
(106)
![]() e=0.189G
-1.6
(107)
e=0.189G
-1.6
(107)
![]() e=0.32tГ
+22.3PH-72.7
(108)
e=0.32tГ
+22.3PH-72.7
(108)
![]() e=0.215tГ
+14.85PH+0.372PZ-60.5
(109)
e=0.215tГ
+14.85PH+0.372PZ-60.5
(109)
![]() e=0.16tГ
+11.1PH+0.28PZ+0.048G-45.8
(110)
e=0.16tГ
+11.1PH+0.28PZ+0.048G-45.8
(110)
На судах пр. А-333 типа «Орлёнок» в качестве ГД устанавливали пару дизелей типа 8VD26/20 AL-2 номинальной мощностью 2х882 кВт при n=1000об/мин для них:
![]() e=0.4973tГ
-118.7
(111)
e=0.4973tГ
-118.7
(111)
![]() e=52PH+4.1
(112)
e=52PH+4.1
(112)
![]() e=0.2486tГ
+10.36Р2Н
+4.8PH-49.46
(113)
e=0.2486tГ
+10.36Р2Н
+4.8PH-49.46
(113)
На рис. 38 – 43 показаны тяги новых траулеров, т.е. это эталон, который достигается судном только один раз во время ходовых сдаточных испытаний на заводе – строителе. Во время эксплуатации судов их тяга находится в постоянной динамике: от ремонта до ремонта она снижается, а во время ремонта - повышается. Следовательно, уместно ввести понятие о фактической тяге и надо иметь метод ее получения на любом судне в любой момент времени силами членов экипажа.
Фактическую тягу траулера можно определить по зависимости:
Ррф = Ррн – ΔРр (114)
где ΔРр – потеря тяги. Потеря тяги имеет две составляющие: потерю тяги из-за износа машино-движительного комплекса (МДК) и потерю тяги из-за износа корпуса судна. Потеря тяги из-за износа МДК складывается из многих факторов:
потеря мощности ГД из-за износа цилиндропоршневой группы, из-за износа топливной аппаратуры, из-за нарушения регулировок ГД;
потеря мощности в опорах гребного вала из-за их износа и повышенного трения;
рост шероховатости лопастей винта, что приводит к равенству моментов сопротивления и генерируемого ГД на меньших углах атаки лопастей у ВРШ или на меньших оборотах ГД при ВФШ, что уменьшает упор винта.
Эта часть потерь не зависит от скорости судна и может быть определена на судне, лежащем в дрейфе с ГД, работающим на винт при нулевом упоре. Потеря тяги из-за износа корпуса зависит от скорости и обусловлена обрастанием корпуса, гофрировкой корпуса, а также воздействием ветра и волнения. В первом приближении можно принять зависимость потери тяги от скорости линейной. Если принять линейную модель, то проблема отыскания зависимости потери тяги от скорости сильно упрощается, т.к. для построения прямой достаточно двух точек. Методика получения зависимости ΔРр=f(V) базируется на проведении двух испытаний судна: на свободном ходу и в дрейфе с ГД, работающим на винт при нулевом упоре.
При испытании судна на
свободном ходу измеряются параметры:
скорость свободного хода, относительная
мощность, развиваемая ГД и мощность,
отбираемая валогенератором. По этим
параметрам рассчитывается мощность,
пошедшая на винт (87) и (86) и по (79)
рассчитывается потеря тяги на свободном
ходу. Проведение таких испытаний не
требует отвлечения судна от выполнения
производственной программы, т.к. на
полном свободном ходу судно в море идет
не один час. Второй этап испытания судна
– испытание в дрейфе с ГД, работающим
на винт при нулевом упоре. При этом
измеряются косвенные характеристики
ГД, т.к. судовой прибор относительной
мощности ГД на малых мощностях не
работает, и мощность, отбираемая
валогенератором. По косвенным
характеристикам определяется относительная
мощность ГД (зависимости (87 – 113) по типу
судна), затем определяется мощность,
пошедшая на винт, а по зависимости в
форме (79) по типу судна определяется
потеря тяги из-за износа МДК. Тогда
уравнение потери тяги будет иметь вид:
ΔРр = В0
+ В1V,
причем В0
= ΔРрМДК,
а В1
=
![]() .
Фактическая тяга траулера на скорости
траления рассчитывается по схеме: по
допускаемой мощности, пошедшей на винт
и скорости траления рассчитывается
тяга нового судна, по зависимости потери
тяги на какой-то момент времени и скорости
траления рассчитывается потеря тяги,
после чего рассчитывается фактическая
тяга траулера на какой-то момент времени.
.
Фактическая тяга траулера на скорости
траления рассчитывается по схеме: по
допускаемой мощности, пошедшей на винт
и скорости траления рассчитывается
тяга нового судна, по зависимости потери
тяги на какой-то момент времени и скорости
траления рассчитывается потеря тяги,
после чего рассчитывается фактическая
тяга траулера на какой-то момент времени.
По фактической тяге необходимо настраивать трал с там, чтобы не перегружать ГД. Если возможности регулировки трала данной конструкции исчерпаны, то необходимо переходить на трал другой конструкции. Регулировки и замена тралов возможны лишь в том случае, если имеются технические паспорта тралов.
5.4. Техническая паспортизация тралов.
Технический паспорт получает любое инженерное сооружение. В техническом паспорте дается словесное описание названия важнейших технических характеристик и их числовые значения. Тралы имеют много десятков важных технических характеристик, но не все из них варьируются в течении суток или рейса, а для части важнейших характеристик нет приборной техники для их измерения (например, угол атаки траловых досок, их крен и дифферент), поэтому такие характеристики можно исключить из технического паспорта. При сокращении числа характеристик несколько страдает точность технического паспорта, но расширение номенклатуры технических характеристик делает невозможной саму работу по технической паспортизации тралов. По этой причине в настоящее время технических паспортов на тралы нет. Точнее, какие-то технические характеристики о трале приводятся на чертеже общего вида, но это очень убогая информация для членов судовых экипажей. Технический паспорт трала – очень сложного инженерного сооружения, представляющего собой пространственную проницаемую оболочку, не может быть простым. Технический паспорт на трал – это система уравнений, связывающих одни технические характеристики трала с другими. По нашему подходу к этой проблеме число характеристик должно быть минимальным, но достаточным для целей эксплуатации. Мы выделили восемь важнейших характеристик, причем половину из них мы отнесли к управляющим факторам (или аргументам), а часть к функциям отклика.
К аргументам отнесли:
длину вытравленных ваеров L, м;
скорость траления VT, узлы;
массу грузов углубителей М, кг;
длину кабелей и голых концов
 К,
м.
К,
м.
К функциям отклика отнесли:
агрегатное сопротивление трала R, кН,
горизонт хода трала (расстояние от поверхности воды до гужа верхней подборы) Н, м;
вертикальное раскрытие трала h, м;
расстояние между траловыми досками
 ,
м.
,
м.
Из дальнейшего будет видно, почему мы стремились к сокращению числа характеристик.
В качестве моделей, связывающих функции отклика и аргументы предлагаются простейшие – линейные модели. Тогда
R = A0 + A1L + A2V + A3M + A4lK
H = B0 + B1L + B2V + B3M + B4lK (115)
h = C0 + C1L + C2V + C3M + C4lK
lT = D0 + D1L + D2V + D3M + D4lK
Следовательно, задача по получению технического паспорта трала сводится к получению 20-ти коэффициентов для каждой конструкции тралов. Для получения этих 20-ти коэффициентов существует два метода: во-первых, метод случайных наблюдений; во-вторых, метод планирования экспериментов. Оба метода обладают как преимуществами, так и недостатками. К преимуществам первого метода можно отнести простоту сбора информации, а к его недостаткам – сложность обработки результатов наблюдений и узость диапазонов варьирования параметров. Второй метод является современным, при нем легко обрабатываются результаты опытов, но для его реализации требуются специальные технические траления. Поскольку мы не рекомендуем применять метод случайных наблюдений, то он здесь не описывается. Переходим сразу к методу планирования экспериментов. Планов экспериментов существует множество, из которого мы предлагаем план типа ПФЭ 2К, что означает: линейный полно факторный эксперимент. К – это число факторов, а 2 – означает, что каждый фактор может принимать только два значения: минимальное и максимальное. Из приведенного видно, что только для одноразовых опытов при числе факторов четыре, требуется 16 опытов (24=16). При числе факторов 5, требуется 32 одноразовых опытов, при числе факторов 14 (как это рекомендует известный в промышленном рыболовстве ученый А.Л. Обвинцев) – 16384 одноразовых опытов. Опытами в данном случае являются траления в океане с крупных траулеров, стоимость эксплуатации, в сутки которых обходится в десятки тысяч долларов. Отсюда становится понятным стремления к сокращению числа факторов.
Для реализации плана ПФЭ 2К, необходимо составить таблицу варьирования факторов. Ниже приведена такая таблица, в которую для наглядности вставлены какие-то случайные числа.
Таблица 7. Описание факторов.
|
Факторы |
мин |
макс |
осн. уров |
инервал варьиров |
|
Длина ваеров L, м. (Х1) |
200 |
1600 |
900 |
700 |
|
Скорость V, узл. (Х2) |
3 |
6 |
4,5 |
1,5 |
|
Масса грузов М, кг (Х3) |
200 |
2000 |
1100 |
900 |
|
Длина кабелей и голых концов lК, (Х4) |
100 |
300 |
200 |
100 |
В техническом паспорте трала, приведенном в (115) все факторы находятся в естественных размерностях. При использовании метода планирования экспериментов необходимо преобразовать факторы в безразмерный вид. Делается это с помощью зависимости (116)
![]() (116)
(116)
где
![]() i
– безразмерное значение i-того
фактора,
i
– безразмерное значение i-того
фактора,
Xi – размерное значение i-того фактора,
Xi0 – основной уровень i-того фактора,
Ji – интервал варьирования i-того фактора.
Xi0
=
![]() (117)
(117)
Ji
=
![]() (118)
(118)
В безразмерном виде все факторы при минимальном уровне имеют значение (-1), а при максимальном (+1). Тогда матрица плана будет иметь вид (см. табл. 8)
Таблица 8. Матрица плана экспериментов при числе факторов 4.
-
№№
ПП
 1
1 2
2 3
3 4
4R
кН
H
м
h
м
lT
м
1
-1
-1
-1
-1
2
+1
-1
-1
-1
3
-1
+1
-1
-1
4
+1
+1
-1
-1
5
-1
-1
+1
-1
6
+1
-1
+1
-1
7
-1
+1
+1
-1
8
+1
+1
+1
-1
9
-1
-1
-1
+1
10
+1
-1
-1
+1
11
-1
+1
-1
+1
12
+1
+1
-1
+1
13
-1
-1
+1
+1
14
+1
-1
+1
+1
15
-1
+1
+1
+1
16
+1
+1
+1
+1
Для реализации плана при
одноразовом повторении опытов достаточно
провести четыре технических траления.
На всех современных крупных траулерах
промысловые схемы позволяют иметь два
вооруженных трала, т.е. имеют схему
«дубль». В этом случае трал №1 вооружаем
минимальными грузами и минимальными
кабелями, т.е.
![]() 3
= -1 и
3
= -1 и
![]() 4
= -1.
Трал №2 вооружаем
максимальными грузами и кабелями, т.е.
4
= -1.
Трал №2 вооружаем
максимальными грузами и кабелями, т.е.
![]() 3
= +1 и
3
= +1 и
![]() 4
= +1. Начинаем траление № 1 тралом № 1.
Опыт №1:отдаем минимальное количество
ваеров, оговоренное в таблицах 7 и 8 и
даем максимальную скорость. При этом
получится минимальный горизонт хода
трала и, если верхняя подбора трала
выйдет на поверхность воды, то надо
корректировать либо минимальное значение
длины ваеров в сторону увеличения, либо
максимальную скорость в сторону
уменьшения таким образом, чтобы верхняя
подбора трала погрузилась под поверхность
воды. Результаты корректировки отражаются
в таблице 7 и в последующих опытах
используются только новые значения
факторов. После того как длина ваеров
и скорость установлены в заданных
значениях, необходимо дать выдержку
времени 20 мин. на то, чтобы система
судно-трал пришла в равновесие, после
этого измеряются все значения функций
отклика и записываем результаты в
таблицу 8 строка 3.
4
= +1. Начинаем траление № 1 тралом № 1.
Опыт №1:отдаем минимальное количество
ваеров, оговоренное в таблицах 7 и 8 и
даем максимальную скорость. При этом
получится минимальный горизонт хода
трала и, если верхняя подбора трала
выйдет на поверхность воды, то надо
корректировать либо минимальное значение
длины ваеров в сторону увеличения, либо
максимальную скорость в сторону
уменьшения таким образом, чтобы верхняя
подбора трала погрузилась под поверхность
воды. Результаты корректировки отражаются
в таблице 7 и в последующих опытах
используются только новые значения
факторов. После того как длина ваеров
и скорость установлены в заданных
значениях, необходимо дать выдержку
времени 20 мин. на то, чтобы система
судно-трал пришла в равновесие, после
этого измеряются все значения функций
отклика и записываем результаты в
таблицу 8 строка 3.
Опыт № 2: уменьшаем скорость до минимального значения, даем выдержку 20 минут, измеряем значения функций отклика и записываем результаты в таблицу 8 строка 1.
Опыт № 3:травим ваера до максимального значения, выдерживая минимальную скорость, даем выдержку 20 минут, измеряем функции отклика и записываем результаты в таблицу 8 строка 2.
Опыт № 4: увеличиваем скорость до максимального значения, даем выдержку 20 минут, измеряем функции отклика и записываем результаты в таблицу 8 строка 4.
После этого полностью выбираем трал №1 и отдаем трал № 2 для проведения траления №2. При тралении №2 действуем по той же методике, которая применялась в тралении №1:
Опыт №5
![]() = -1,
= -1,
![]() = +1, результаты в таблицу 8 строка 15,
= +1, результаты в таблицу 8 строка 15,
Опыт №6
![]() = -1,
= -1,
![]() = -1, результаты в таблицу 8 строка 13,
= -1, результаты в таблицу 8 строка 13,
Опыт №7
![]() = +1,
= +1,
![]() = -1, результаты в таблицу 8 строка 14,
= -1, результаты в таблицу 8 строка 14,
Опыт №8
![]() = +1,
= +1,
![]() = +1, результаты в таблицу 8 строка 16.
= +1, результаты в таблицу 8 строка 16.
После этого полностью выбираем трал №2 и отдаем трал № 1, у которого грузы углубители довели до максимального значения, для проведения траления №3. При тралении №3 действуем по той же методике, которая применялась в тралении №1:
Опыт №9
![]() = -1,
= -1,
![]() = +1, результаты в таблицу 8 строка 7,
= +1, результаты в таблицу 8 строка 7,
Опыт №10
![]() = -1,
= -1,
![]() = -1, результаты в таблицу 8 строка 9,
= -1, результаты в таблицу 8 строка 9,
Опыт №11
![]() = +1,
= +1,
![]() = -1, результаты в таблицу 8 строка 6,
= -1, результаты в таблицу 8 строка 6,
Опыт №12
![]() = +1,
= +1,
![]() = +1, результаты в таблицу 8 строка 8.
= +1, результаты в таблицу 8 строка 8.
После этого полностью выбираем трал №1 и отдаем трал № 2, у которого грузы углубители уменьшили до минимального значения, для проведения траления №4. При тралении №4 действуем по той же методике, которая применялась в тралении №1:
Опыт №13
![]() = -1,
= -1,
![]() = +1, результаты в таблицу 8 строка 11,
= +1, результаты в таблицу 8 строка 11,
Опыт №14
![]() = -1,
= -1,
![]() = -1, результаты в таблицу 8 строка 9,
= -1, результаты в таблицу 8 строка 9,
Опыт №15
![]() = +1,
= +1,
![]() = -1, результаты в таблицу 8 строка 10,
= -1, результаты в таблицу 8 строка 10,
Опыт №16
![]() = +1,
= +1,
![]() = +1, результаты в таблицу 8 строка 12.
= +1, результаты в таблицу 8 строка 12.
Полностью выбираем трал №2 и на этом опыты закончились, наступает период обработки результатов измерений. Обработку результатов покажем на примере сопротивления трала, по остальным функциям отклика работа аналогична. Задачей обработки является получение пяти коэффициентов А0, А1, А2, А3 и А4 для R в системе уравнений (115). Но эти коэффициенты стоят при факторах в их естественной размерности, а в опытах факторы были в безразмерном виде. По этой причине найдем сначала коэффициенты а0, а1, а2, а3 и а 4 для факторов в безразмерном виде, а по ним найдем коэффициенты для факторов в естественной размерности.
а0
=
![]() ,
(119) а1
=
,
(119) а1
=
 ,
(120) а2
=
,
(120) а2
=
 (121)
(121)
а3
=
 ,
(122) а4
=
,
(122) а4
=
 ,
(123).
,
(123).
Тогда уравнение сопротивления
трала при естественной размерности
факторов будет: R
= а0
+ а1![]() +а2
+а2![]() +а3
+а3![]() +а4
+а4 (124)
(124)
Тогда А0 = а0 + а1*L0/JL + а2*V0/JV + а3*M0/JM + а4*lK0/Jlk (125)
A1 = а1/JL, A2 = а2/JV, A3 = а3/JM, A4 = а4/ Jlk (126)
После получения математических моделей трала (R, H, h, lT)=f(L, V, M, lK) проверяется их адекватность. Эта работа выполняется путем построчной подстановки значений факторов из таблицы 8 в математические модели и сравнение результатов расчетов с результатами опытов. Оценивается дисперсия воспроизведения и СКО воспроизведения. Оценивается относительная ошибка воспроизведения путем деления СКО на среднее значение функции отклика. Проводится сравнение относительной ошибки воспроизведения с заранее заданной точностью (которую можно задавать в пределах 5-10%). Если окажется, что условие εВ<[ε], то работу можно считать законченной. Если модель окажутся неадекватными, то следует уменьшить диапазоны варьирования факторов (таблица 7) и повторить работу.
5.5. Расчет ожидаемого улова тралом.
Ниже будет приведена методика, разработанная замечательным русским ученым Ю.В. Кадильниковым, которую мы несколько упростили для лучшего освоения её студентами.
Анализ тяговых характеристик траулеров и техническая паспортизация тралов позволяют подобрать к судну такой трал, который ему по силам. Применение метода Кадильникова позволяет оценить ожидаемые уловы того или иного варианта оснащения судна тралом и выбрать наилучший с точки зрения экономики вариант.
Улов тралом, безусловно, является случайной величиной, поэтом в дальнейшем целесообразно говорить не о величине улова, а о величине математического ожидания улова, тогда:
mQ = h1*lT*VT*τT*β*χ*P (127),
где mQ – математическое ожидание улова, т,
h1 – вертикальная зона действия трала, м,
lT – расстояние между досками, м,
VT – скорость траления, м/с,
τT – время траления, с,
β – относительная плотность заселения трехмерного пространства,
χ – удельная биомасса скопления, т/м3,
Р – общая вероятность улова тралом.
Вертикальная зона действия трала может быть равна вертикальному раскрытию трала, определенному по паспорту трала, но это только в случае, если трал не деформирован ни дном, ни поверхностью. Во всех остальных случаях – это величина, измеренная прибором, например, ИГЭКом. Относительная плотность заселения трехмерного пространства – это отношение объёмов суммарно занимаемых косяками рыб к объёму разведанного пространства. Удельная биомасса скопления определяется экспериментально. Находится косяк, определяется его объём и облавливается кошельковым неводом. Масса улова делится на объём косяка – получается искомая величина. Величины β и χ рыбаки получают из специальных публикаций и дополняют эти сведения своим опытом. Величина Р – является произведением десяти главных вероятностей:
Р =
![]() (128)
(128)
Р1 – вероятность попадания рыбы в пространство между верхней и нижней подборами;
Р2 - вероятность попадания рыбы в пространство между досками;
Р3 – вероятность захвата рыбы по трассе траления;
Р4 - вероятность попадания рыбы в пространство между крыльями трала;
Р5 - вероятность попадания рыбы в устье трала;
Р6 - вероятность попадания рыбы в мелкоячейную часть трала;
Р7 – вероятность удержания рыбы в трале во время траления;
Р8 - вероятность удержания рыбы в мешке трала;
Р9 - вероятность удержания рыбы в трале во время выборки трала;
Р10 - вероятность удержания рыбы в трале от момента захода в устье последней стаи до момента выборки трала.
Вероятность Р1 рассчитывается по схеме:
 (129)
(129)
где Ф(х) – функция распределения;
![]() –мат. ожидание (МО) разности
ординат оси трала и оси скопления рыбы,
м;
–мат. ожидание (МО) разности
ординат оси трала и оси скопления рыбы,
м;
![]() – среднее
квадратичное отклонение (СКО) этой
величины, в м.
– среднее
квадратичное отклонение (СКО) этой
величины, в м.
![]() (130)
(130)
где σZ – СКО ординаты i-ой рыбы от оси стаи, м ;
ξ– относительная ошибка измерения глубины эхолотом;
Нm– максимальная глубина «заныривания» стай , в м;
mh– МО глубины хода стай, в м .
 (131)
(131)
где σh – СКО глубины хода стай, в м
σZ
=
![]() , где С–
полувысота стаи в м (132)
, где С–
полувысота стаи в м (132)
Вероятность Р2 рассчитывается по схеме :
![]() (133)
(133)
где σУО – СКО разности аппликат оси трала и оси скоплений, в м;
 (134)
(134)
где σУ – СКО аппликаты i-ой рыбы от оси стаи, м;
θ – угол диаграммы направленности излучения эхолота;
VР – скорость рыбы в м/c;
τ– время от момента обнаружения стаи бортовым эхолотом до момента подхода досок к стае, с.
![]() , (135)
, (135)
где dСТ - диаметр стаи
VР= 5,28∙ lР ,где lР –длина рыбы в м (136)
![]() (137)
(137)
L≈0.5∙LC + LВ (138)
где LC– длина судна, м;
LВ– длина ваеров;
VТ– скорость траления в м/с.
Вероятность Р3 рассчитывается:
Р3
=
1 -
![]() ,
(139)
,
(139)
где L – по (138); σХО ≈ σУО
Вероятность Р4 рассчитывается:
Р4=
![]() (140)
(140)
где ℓ– расстояние между крыльями, м;
ℓ= ℓТ – 2∙ℓ К∙ SinαК , ; (141)
где ℓК–длина кабелей и голых концов, αК– угол атаки кабелей
Р11
=
![]() ,
гдеℓД–
высота (размах доски), м
(142)
,
гдеℓД–
высота (размах доски), м
(142)
 0,
если В>1, А<0, АВ>1,
0,
если В>1, А<0, АВ>1,
1–0,5∙В, если А<0, В≤1,
0,5∙В, если А<0,В>1,
Р12=
 ,
(143)
,
(143)
(если A>0, B>1, A∙B<1,
![]() ,
,
если А≥0, В≤1, А∙В<1
![]() (144)
(144)
где ωm– [м] дистанция реагирования рыбы на трал как на опасность.
![]() (145)
(145)
Вероятность Р5 рассчитывается :
![]() (146)
(146)
Вероятность Р6 рассчитывается:
![]() (147)
(147)
где ℓО, hO– горизонтальное и вертикальное раскрытие мелкоячейной части трала, в м.
ℓО
≈
hO
=![]() (148)
(148)
где а – шаг ячеи в мелкоячейной части трала, м;
n– число ячей по передней кромке пластины без учета ячей, пошедших в боковой шов,
N– число пластин;
UX– посадочный коэффициент фактический (принять UX=0,25).
![]() (149)
(149)
![]() (150)
(150)
![]() (151)
(151)
![]() (152)
(152)
![]()
![]()
![]() (153)
(153)
где LТ1 и LТ2 – расстояние до мелкоячейной части от гужа верхней подборы и от конца крыла соответственно.
Вероятность Р7 рассчитывается:
 (154)
(154)
Вероятность Р8 принимается за 1, и рассчитывается необходимый шаг ячеи в мешке по схеме
![]() (155)
(155)
Р8=1
при
![]() ,
для этого необходимо, чтобы отношение
,
для этого необходимо, чтобы отношение
![]() было близко к 4.
было близко к 4.
![]() (156)
(156)
где mW– МО разности максимального охвата тела рыбы и внутреннего размера ячеи, в мм;
mX– МО максимального охвата тела рыбы, в мм;
mY– МО внутреннего размера ячеи, в мм,
mY= 3,92∙аМ (157)
где аМ– шаг ячеи в мешке, в мм;
![]() (158)
(158)
где σW– СКО разности максимального охвата тела рыбы и внутреннего размера ячеи, мм;
σХ– СКО максимального охвата тела рыбы, мм;
σу– СКО внутреннего размера ячеи, мм;
σу = 0,078 ∙ аМ, (159)
Тогда аМ получается как один из корней квадратного уравнения:
mX
–
3,92∙ аМ
= 4
![]()
Вероятность Р9 рассчитывается:
![]() ,
. (160)
,
. (160)
где VП – скорость подъема трала
VП ≈ VВ + VС (161)
VВ для «Атлантик» = 1,2 м/с
VВ для «Прометей» = 1,7 м/с
VВ для «Моонзунд» = 2,0 м/с ,а VС = 1,5 м/с для всех судов
![]() (162)
(162)
Вероятность Р10 рассчитывается:
Р10 = (LT1 + VT*tЗ – VP*tЗ ) / (VP*tЗ) (163)
где t3– время задержки выборки трала после захода последней стаи (принять t3=300 с).
ВНИМАНИЕ: Если расчетное значение любой вероятности получается более единицы, то это означает, что мы имеем дело с достоверным событием, вероятность которого равна единице, точно также, если расчетное значение вероятности получилось отрицательным, то это означает, что мы имеем дело с невероятным событием, вероятность которого равна нулю.
5.6. Промысловые механизмы судов.
Промысловые операции связаны с большими усилиями, измеряемыми тонами и, в отдельных случаях, десятками тон. Для выполнения операций необходимы механизмы. Несмотря на разнообразие орудий лова, и операций с ними, все производственные процессы можно разделить на четыре группы. К первой группе можно отнести операции связанные с приведением орудий лова в рабочее состояние. Ко второй – операции, связанные с непосредственно процессом лова. К третьей – операции, связанные с выборкой орудий лова. К четвертой - операции, связанные с выливкой улова. Операции первой группы имеют большую трудоемкость, составляющую от 10 до 40% от всего процесса лова. Содержание операций, относящихся к первой группе, рассмотрим на примере наиболее применяемого орудия лова – трала. Перед отдачей трал надо разложить особым способом на промысловой палубе, вытянуть за корму и сбросить в воду мешок трала, отдать мотенную и канатную части, травить голые концы и кабеля, присоединить траловые доски и вытравить нужное количество ваеров. Для всех этих операций нужны механизмы, которые на судах объединяются в различные промысловые комплексы или промысловые схемы. В рамках данного подраздела будут рассмотрены только механизмы, а схемы – в следующем. Основу парка промысловых машин составляют лебедки. Лебедки имеют как общие черты, так и различия. Различия обуславливаются, в основном, назначением лебедок и концентрируются в рабочих органах. Рабочие органы бывают для выборки и отдачи канатов и для выборки и отдачи сетей. Рабочие органы бывают фрикционные и навивные. Фрикционный рабочий орган служит только для выборки или отдачи канатов или сетей, а навивные рабочие органы служат для тех же целей, но дополнительно и для хранения намотанных тел. На рис. 44 и 45 приведены примеры фрикционных и навивных рабочих органов лебедок для работы с канатами, а на рис 46 – рабочие органы лебедок для работы с сетями.
Рис. 44. Рабочий орган в виде фрикционного барабана.
Рис. 45. Рабочий орган в виде навивного барабана.
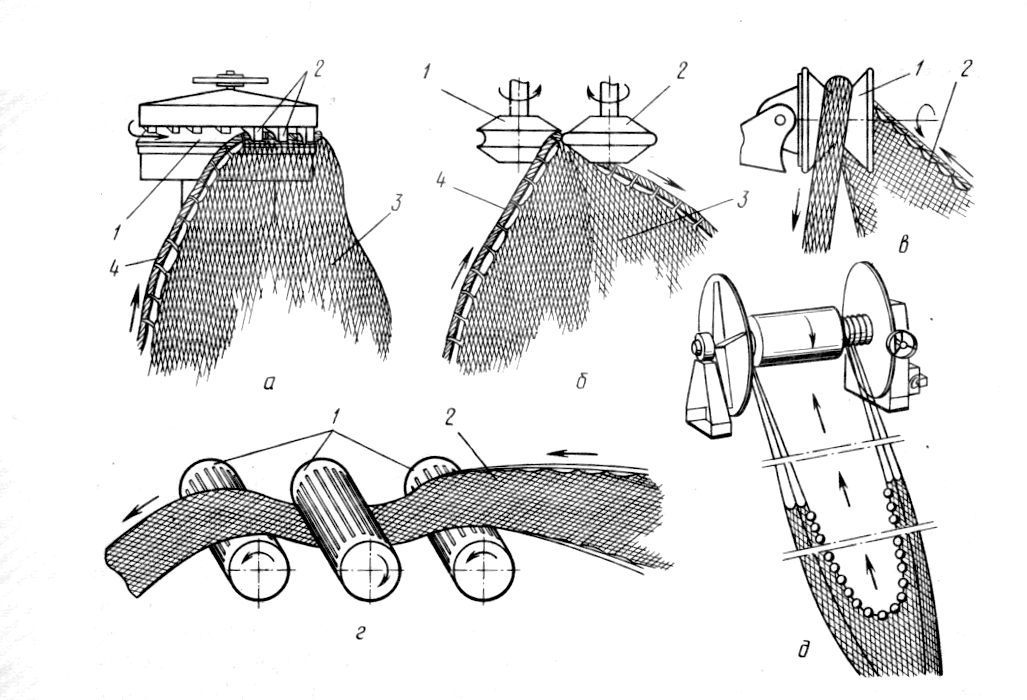
Рис. 46 Рабочие органы для работы с сетными частями орудий лова.
Лебедка состоит из блоков: привод, муфта, редуктор, рабочий орган, механизм упорядочения укладки (только для навивных барабанов с упорядоченной укладкой) и тормозного устройства. Примерная компоновка лебедки с навивным барабаном приведена на рис. 47.
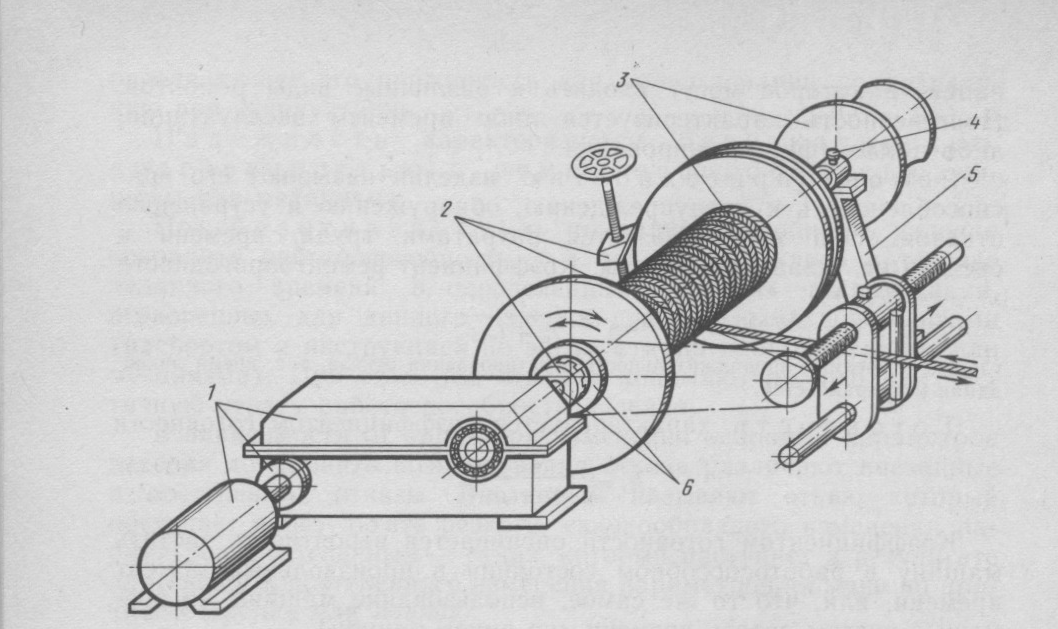
Рис. 47. Компоновка лебедки.
1. Мотор, муфта, редуктор. 2. Привод канатоукладчика, каретка канатоукладчика, привод ленточного тормоза. 3. Навивной барабан, фрикционный барабан. 4. Подшипник. 5. Опора подшипника. 6. Кулачковая муфта.
Классификация рабочих органов для работы с канатами приведена на рис 48.
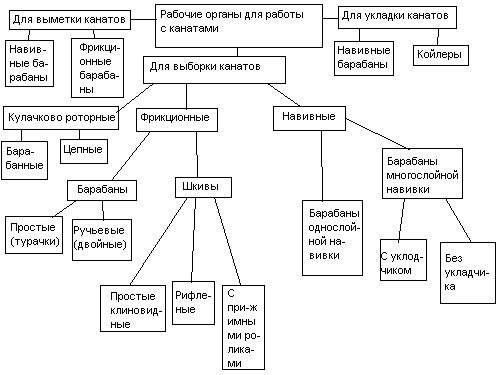
Рис. 48. Классификация рабочих органов для работы с канатами.
Классификация рабочих органов для работы с сетными частями орудий лова приведена на рис 49.

Рис. 49. Классификация рабочих органов для работы с сетными частями орудий лова.
Для проводки канатов и сетных частей орудий лова применяют блоки, ролы, мальгогеры и роульсы (см. рис. 50).
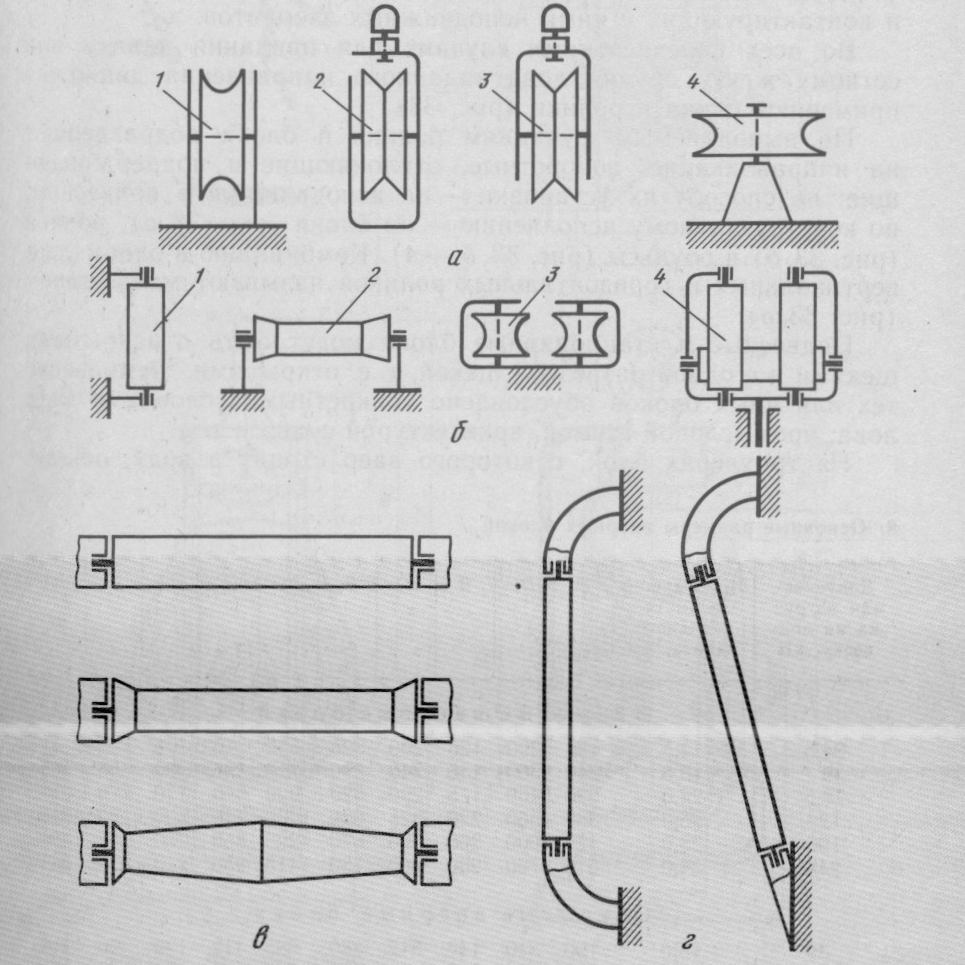
Рис.50. Промысловые блоки, ролики, ролы и роульсы.
а – блоки (1-4 неподвижные, 2-3 подвесные); б – ролики (1-отклоняющий, 2-поддерживающий, 3-двойные, 4-мальгогер); в – ролы; г – роульсы.
На рис. 51 приведена конструкция закрытого и открытого ваерного блока.
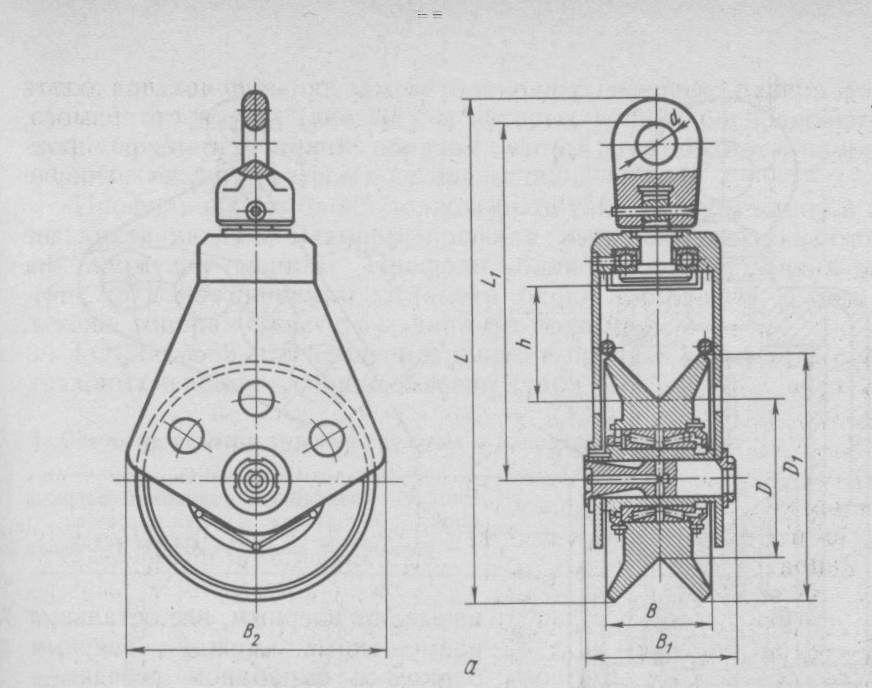
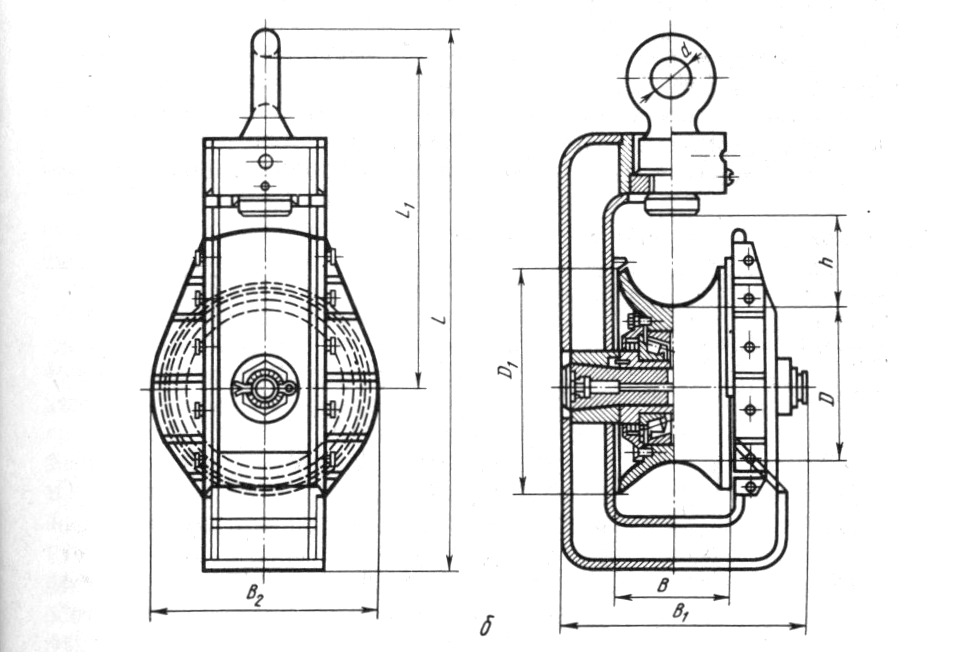
Рис. 51. Ваерные блоки закрытого и открытого типов
В таблице 9 приведены характеристики ваерных блоков.
-
Допускаемая
нагрузка
на подвеску
кН
Наибольший
диаметр
каната
мм
D
D1
B
B1
B2
L
L1
h
d
Масса
блока
кг
Закрытые ваерные блоки
24.5
12.5
190
290
125
200
320
550
375
100
45
41
39
15.5
240
360
145
240
390
710
495
130
55
105
78.5
22
330
460
175
290
520
920
640
170
70
215
123
25
380
560
220
325
630
1090
745
200
80
314
196
28
420
600
260
390
670
1225
850
230
100
485
245
34
510
700
280
400
780
1415
980
270
110
680
Открытые ваерные блоки
39
15
190
310
144
312
380
685
412
130
56
110
78
21
270
412
180
391
472
905
535
160
70
224
137
26
300
462
206
436
520
1045
630
200
80
331
196
30.5
370
560
272
550
610
1330
795
230
100
552
На рис. 52 показано: кинематика канатоукладчика и некоторые детали его конструкции.
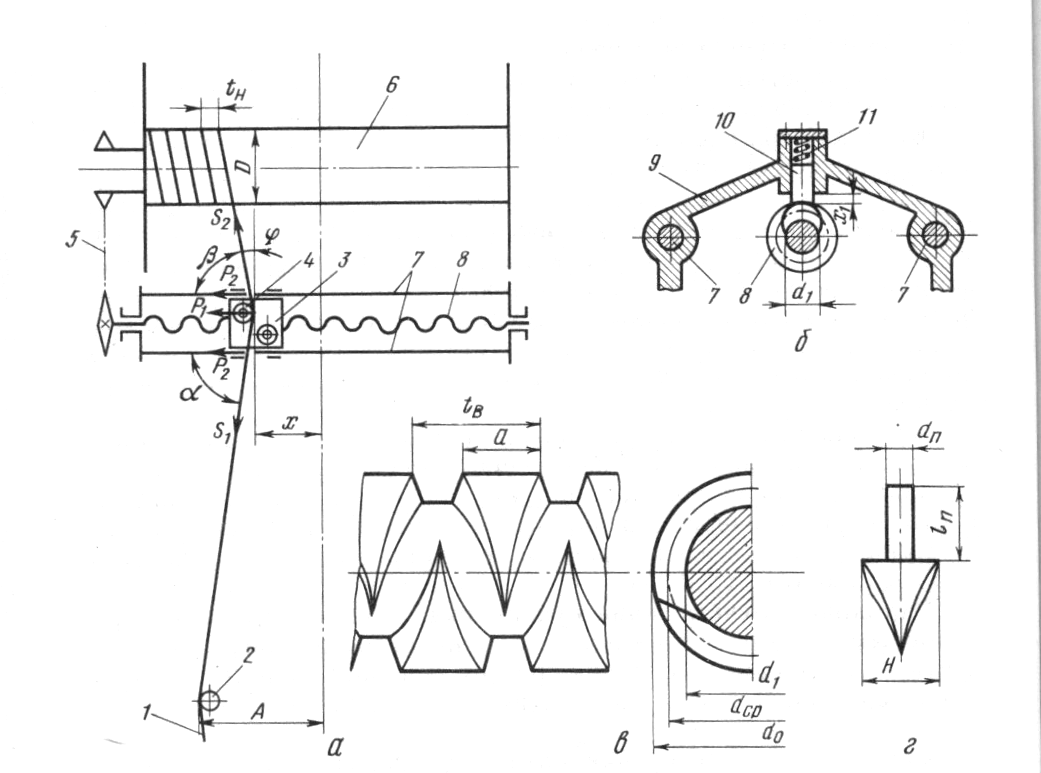
Рис. 52. Винтовой канатоукладчик с приводом от барабана.
а – кинематическая схема; б – каретка; в – ходовой винт; г – поводок.
1 – канат, 2 – подводящий блок, 3 – каретка, 4 – ролики, 5 – цепная передача, 6 - барабан, 7 – направляющие каретки, 8 – ходовой винт, 9 – корпус каретки, 10 – поводец, 11 - пружина поводца.
На рис. 53 показано тормозное устройство лебедки.
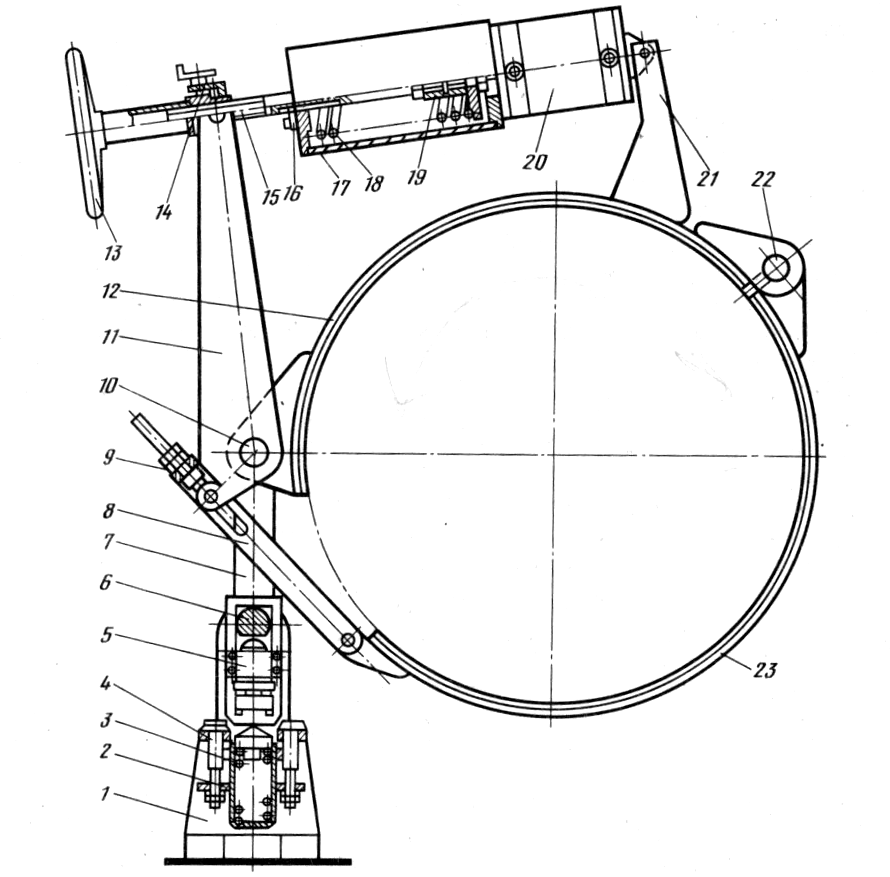
Рис. 53. Ленточный тормоз ваерного барабана лебедки WTJ 12.5
1 – кронштейн, 2 – стакан, 3 – тарелка пружины, 4 – гайка, 5 – тензометрический датчик, 6 – штырь, 7 – тяга, 8 – серьга, 9 – натяжной болт, 10 – штырь обуха верхней ленты, 11 – двуплечный рычаг, 12 – верхняя лента, 13 – маховик, 14 – траверса, 15 – тормозной винт, 16 – планка, 17 – цилиндр, 18 – пружина, 19 – тарелка пружины, 20 – пневматический сервомотор, 21 – кронштейн, 22 – шарнир, 23 – нижняя половина ленты.
На рис. 54 и 55 показаны кинематические схемы однобарабанной и двухбарабанной лебедок.
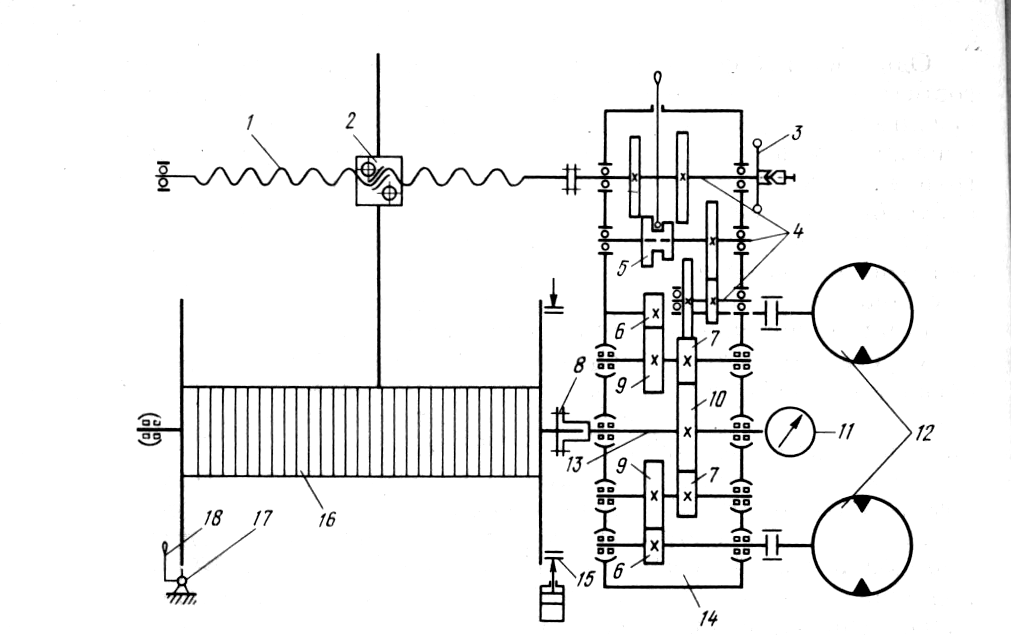
Рис. 54 Кинематическая схема однобарабанной лебедки (ваерной)
1 – ходовой винт ваероукладчика, 2 – каретка, 3 – съемный штурвал, 4 - вспомогательная зубчатая передача, 5 – переключатель передач, 6 – шестерня, 7 – шестерня, 8 – кулачковая муфта, 9 – зубчатое колесо, 10 – зубчатое колесо, 11 – измеритель длины ваеров, 12 - гидромоторы, 13 – грузовой вал, 14 – редуктор, 15 – ленточный тормоз, 16 – ваерный барабан, 17 - защелка-собачка, 18 – рычаг.
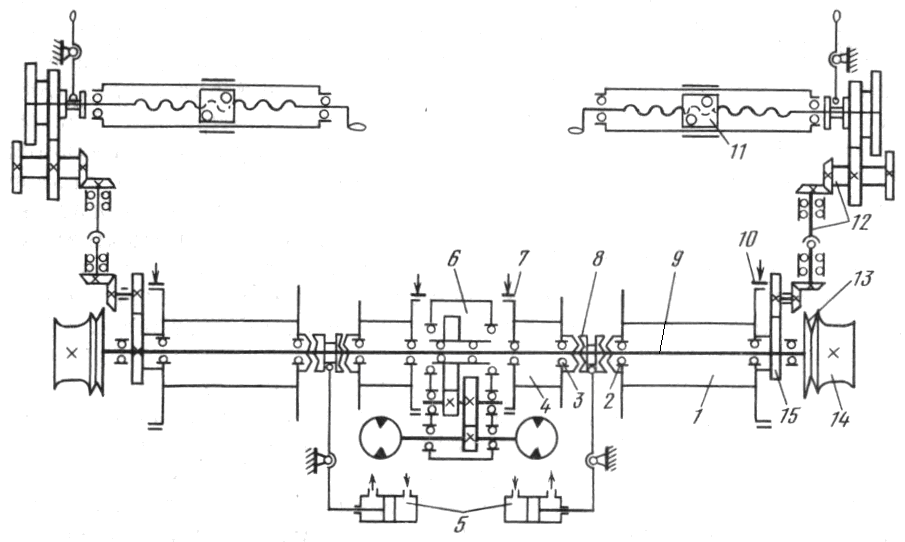
Рис. 55. Кинематическая схема многобарабанной лебедки.
1 – ваерные барабаны, 2 – кулачковая полумуфта, 3 - кулачковая полумуфта, 4 - кабельный барабан, 5 – гидросистема управления, 6 – радиально-сферические двухрядные роликоподшипники, 7 – ленточный тормоз, 8 – подвижная кулачковая муфта двухстороннего действия, 9 – грузовой вал, 10 – ленточный тормоз, 11 – ваероукладчик, 12 – привод, 13 - клиновидные фрикционные шкивы, 14 – турачки, 15 – шестерня.
На рис. 56 показано устройство ваерной лебедки для БМРТ типа «Прометей».
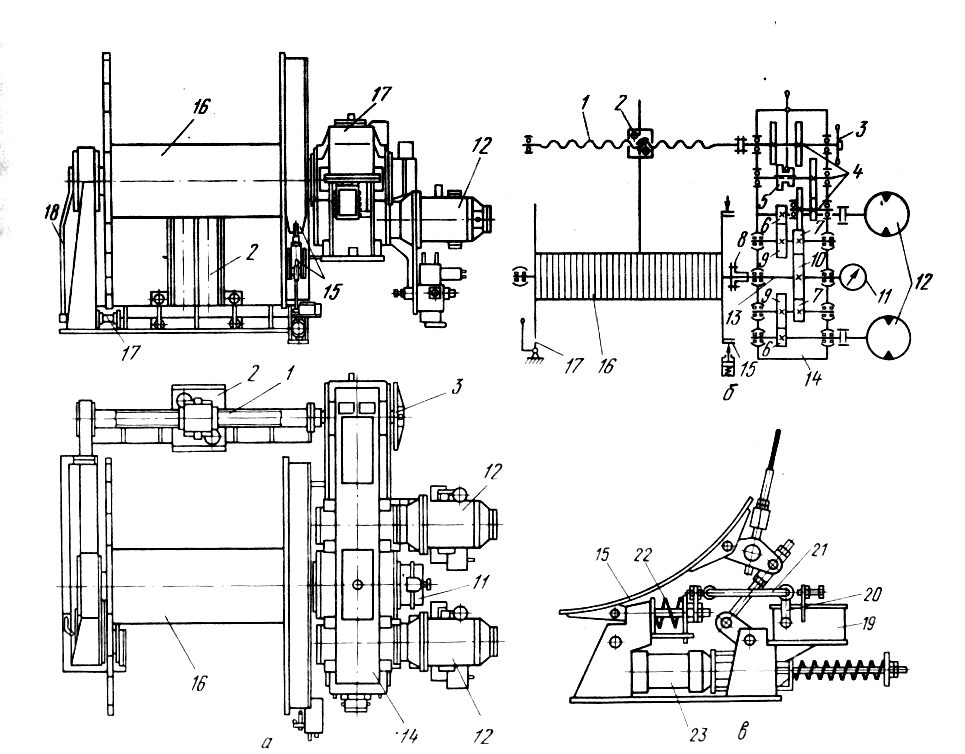
Рис. 56. Ваерная лебедка 2HKW-14
На рис.57 показано устройство ваерной лебедки для БМРТ пр. 1288 типа «Пулковский меридиан».
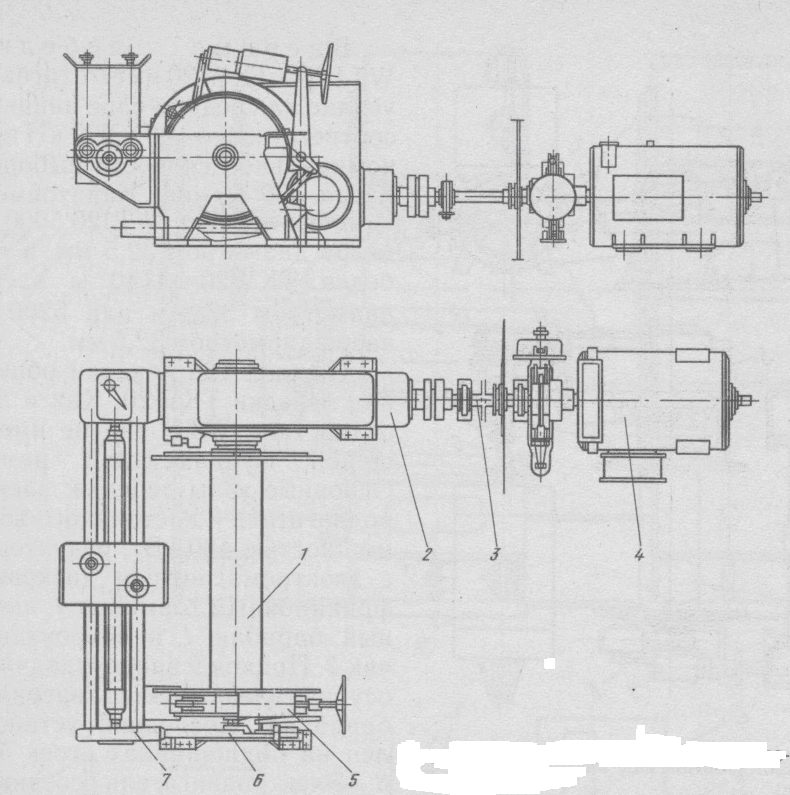
Рис. 57. Ваерная лебедка WTJ-12.5
На рис. 58 показана ваерная лебедка для РКТ-С пр. А-488 типа «Моонзунд».
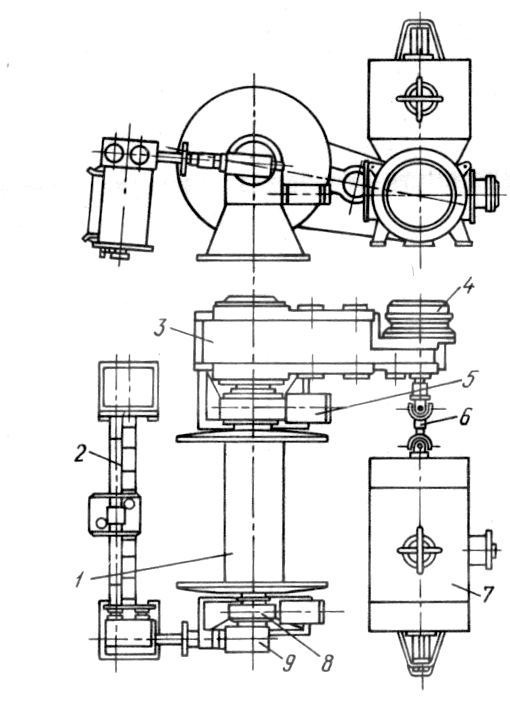
Рис. 58. Ваерная лебедка TKW-20
В последнее время у нас и за рубежом стали применяться комбинированные лебедки, на которые наматываются и канатные и сетные части орудия лова. На рис 59 приведена кабельно-сетная лебедка для БМРТ типа «Прометей».
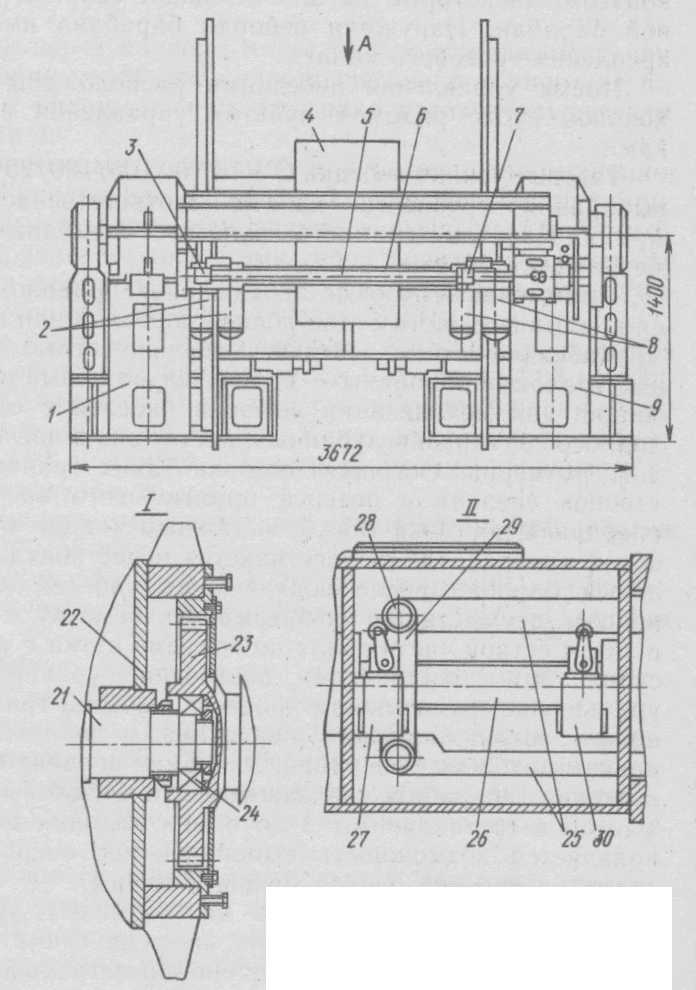
Рис. 59. Кабельно-сетная лебедка для БМРТ типа «Прометей»
На рис. 60 приведен кабельно-сетная лебедка для РКТ-С типа «Моонзунд».
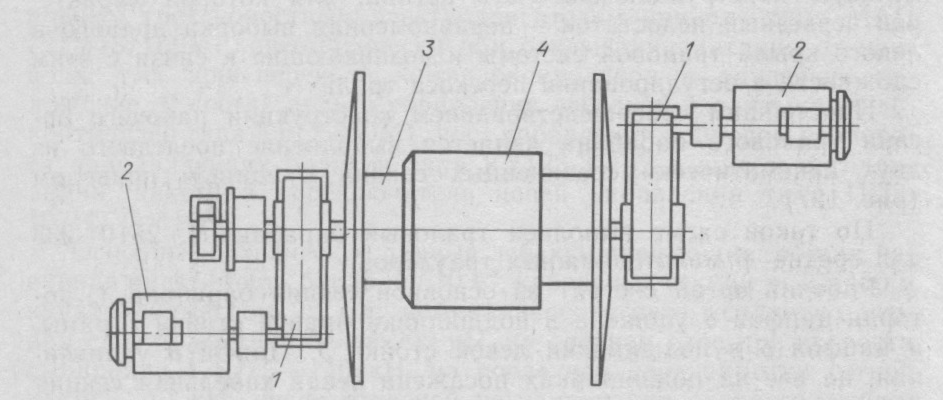
Рис.60. Двухсекционный траловый барабан для РКТ-С типа «Моонзунд».
1 – редукторы, 2 – электромоторы, 3 – кабельные барабаны, 4 сетной барабан.
На рис. 61 приведена подвесная неводовыборочная машина ПМВК – 5.
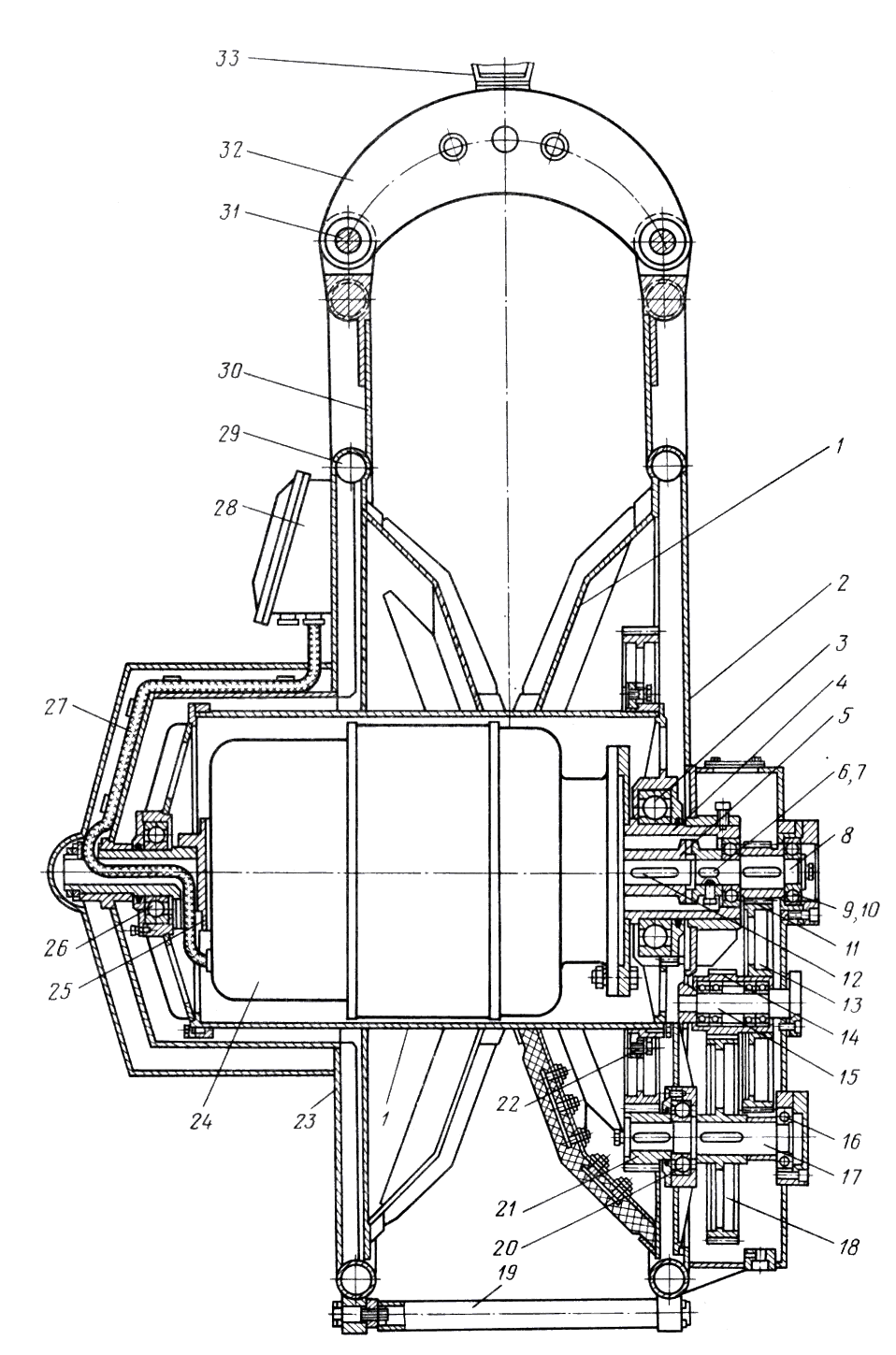
Рис. 61. Подвесная неводовыборочная машина ПМВК -5
На рис. 62 приведена машина ПМВК-11.
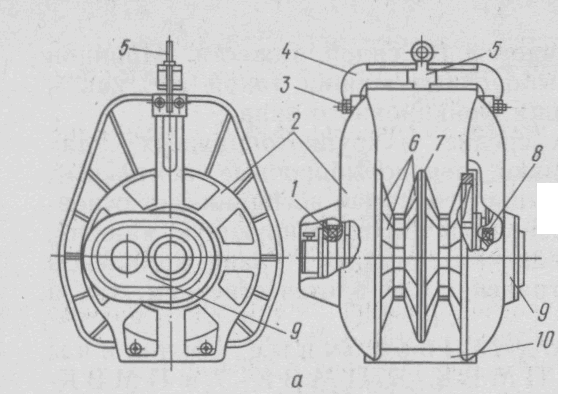
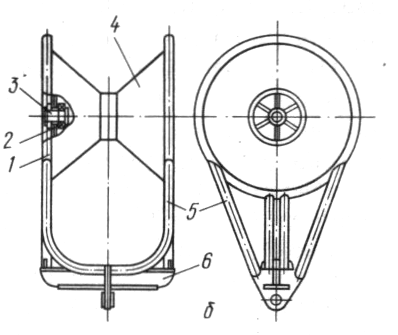
Рис. 62. Подвесная неводовыборочная машина ПМВК-11 (а) и жгутоформирователь к ней (б).
(а): 1 – подшипник, 2 – опорные щеки, 3 – ось, 4 – траверса, 5 - вертлюг, 6 – резиновая футеровка, 7 – барабан, 8 – подшипник, 9 – мотор-редуктор, 10 – основание; (б): 1 – обод, 2 – подшипник, 3 – ось, 4 – катушка, 5 – полудуги, 6 – разъемная траверса.
На рис. 63 приведена кальмароловная лебедка японская модели MY-1.
Рис. 63. Автоматическая удебная установка модели MY – 1 (Япония)
1 – рабочие барабаны, 2 – блок привода и автоматики, 3 – панель контроля и управления.
На рис. 64 приведена ярусовыборочная машина.
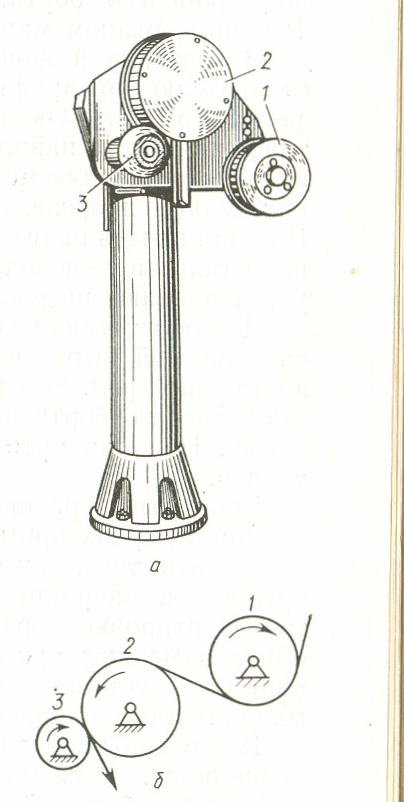
Рис. 64. Ярусовыборочная машина.
1 и 2 – фрикционные барабаны, 3 – прижимной ролик.
На рис. 65 приведен центробежный лопастной рыбонасос.
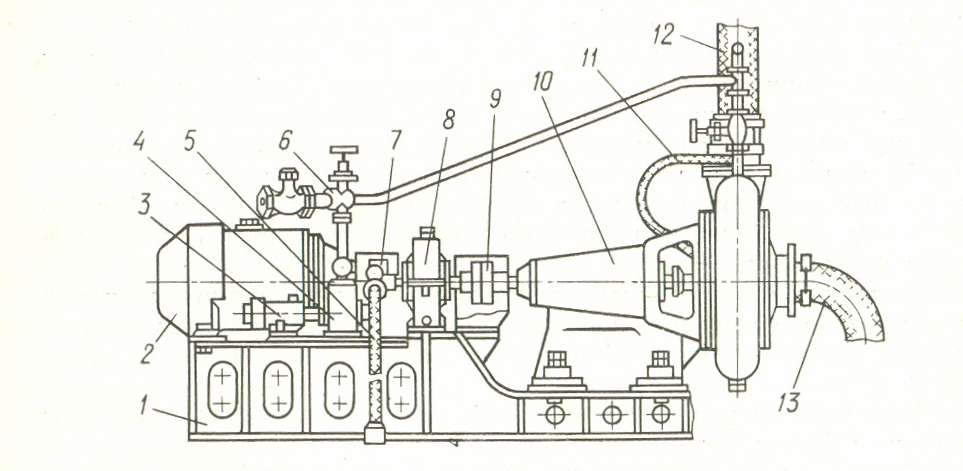
Рис. 65 Рыбонасос с электрическим приводом
5.7. Промысловые схемы судов.
5.7.1. Промысловые схемы траулеров.
В предыдущем разделе были рассмотрены промысловые механизмы, которые на судне могут быть размещены многовариантными способами. Расстановленные в каком-то порядке промысловые механизмы образуют промысловую схему.
Траулеры исторически сначала строились по бортовой промысловой схеме. При бортовой схеме трал отдается и выбирается с рабочего борта. В этом случае применяется многооперационная траловая лебедка, которая устанавливается под рубкой судна, причем ось грузового вала перпендикулярна ДП судна. В промысловую схему включаются также траловые дуги (носовая и кормовая) с ваерными блоками, направляющие блоки, грузовая стрела и штаг-корнаки. На рис. 66. показана промысловая схема бортового траулера (вид сверху, рабочий борт - левый); на рис. 67. показана траловая дуга (носовая) и на рис. 68. показана промысловая схема (вид с боку, рабочий борт – правый).
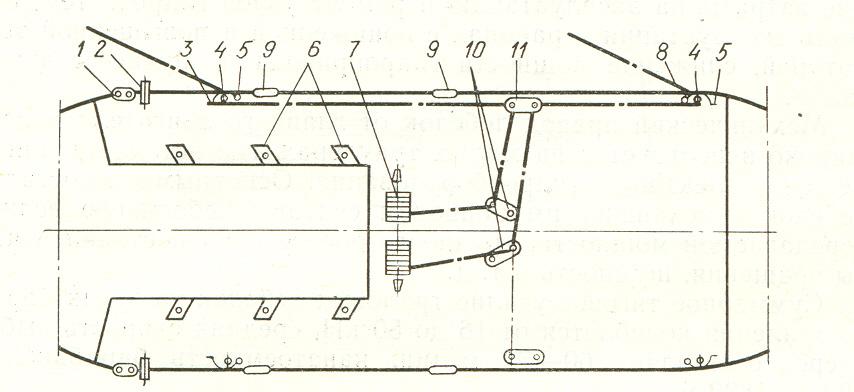
Рис. 66. Промысловая схема бортового траулера (рабочий борт – левый).
1. Кип мессенжера,2.стопрор-блок, 3.кормовая траловая дуга,4,5.блоки траловой дуги, 6.отводящие ролики на надстройке, 7.траловая лебедка, 8.носовая траловая дуга, 9.роульс на фальшборте, 10.центральные ролики, 11.бортовые ролики.
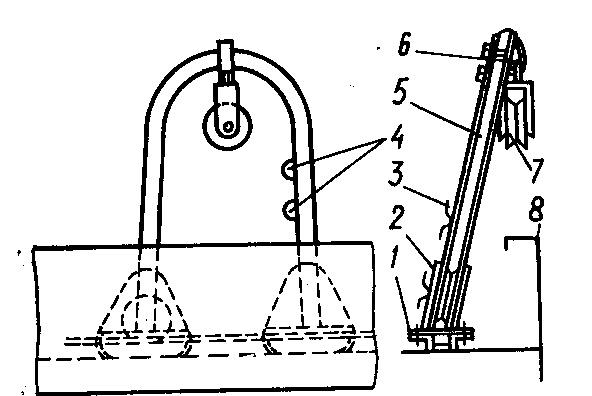
Рис. 67. Траловая дуга.
1Фундамент, 2.направляющий ролик, 3.утка, 4.пымы цепного стопора, 5.корпус дуги, 6.скоба подвесного ваерного блока, 7.ваерный блок, 8.фальшборт.

Рис. 68. Промысловая схема бортового траулера (вид сбоку, рабочий борт - правый).
1.Стопор-блок, 2.кип мессенжера, 3.кормовая стрела, 4.сушилка, 5.носовая стрела, 6.джильсон, 7.вожжи.
Основной недостаток бортовой схемы заключается в том, что при отдаче и выборке трала судно должно ложиться рабочим бортом к ветру. Это обстоятельство приводило к тому, что значительную часть самого дорогого времени – времени на промысле, тратилось на ожидание приемлемой для лова погоды.
Развитием промысловых схем и промыслового судостроения стали траулеры кормового траления. Первым в мире кормовым траулером был советский траулер «Пушкин», построенный по нашему проекту в ФРГ в 1955 году. С тех пор и по настоящее время во всем мире крупные траулеры строятся только по кормовой схеме траления. Разумеется, что за прошедшие годы появилось много вариаций промысловых схем кормового траления. Рассмотрим их все, начиная со схемы кормового траулера с многооперационными лебедками, и кончая траулером кормового траления с однооперационными лебедками по безслиповой схеме.
Траулеры кормового траления с многооперационными лебедками.
По этой схеме были построены суда следующих типов: БМРТ пр. 394 и его модификации; РТМ типа «Тропик»; РТМ типа «Атлантик»-1; ППР типов «Рембрандт» и «Сказочник Андерсен»; РКТ-С типа «Наталья Ковшова»; ППР пр. 1276 типа «Алтай». Характерным для этой промысловой схемы было: наличие кормового слипа, кормового переходного мостика, двух кормовых грузовых стрел, двух кормовых грузовых лебедок и одной 4-х барабанной траловой лебедки. Траловая лебедка имеет два навивных и два фрикционных барабанов. Пример такой промысловой схемы показан на рис. 69.
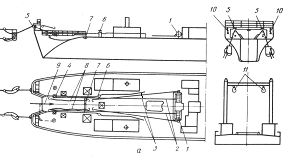
Рис. 69. Промысловая схема кормового траулера с многооперационными лебедками.
1.Траловая лебедка, 2.ваера, 3.вытяжные концы (джильсоны), 4.направляющие ролики, 5.подвесные ваерные блоки, 6.ролики для промера ваеров, 7.слиповая канавка, 8.оттяжки, 9.подъёмный конец, 10.ваерные стопоры, 11.грузовые блоки.
Эта промысловая схема имела ряд недостатков: во время траления ваера шли через всю промысловую палубу, что было опасно для бригады добытчиков; операция по подъёму ваеров в подвесные ваерые блоки с применением стопорных концов была опасной, выборка улова на палубу с помощью джильсонов была опасной.
Развитием этой схемы была схема кормового траулера со слипом с однооперационными лебедками. По этой схеме были построены траулеры: РТМ типа «Атлантик»-2, БМРТ типа «Прометей», БМРТ пр. 1288 типа «Пулковский меридиан», СТ пр. А-333 типа «Орленок», РКТ-С пр. 16080 типа «Антарктида». На судах этого типа промысловые механизмы предназначены для выполнения только одной операции. Для работы с ваерами предназначены ваерные лебедки, которые расположены в корме и при этой схеме доски от ваеров не отключают. Для работы с кабелями и голыми концами предназначены кабельно-вытяжные лебедки, которых на судне может быть четыре и тогда промысловая схема называется «Дубль», она позволяет иметь на палубе два вооруженных трала и отдавать второй трал, не дожидаясь, когда из первого будет вылит улов. Для выборки канатной и мотенной частей трала имеются комбинированные лебедки. Для выборки мешка с уловом служат лебедки гинь-талей. Помимо перечисленных в схему входят две грузовые лебедки и лебедка ИГЭКа. Пример такой схемы показан на рис. 70.
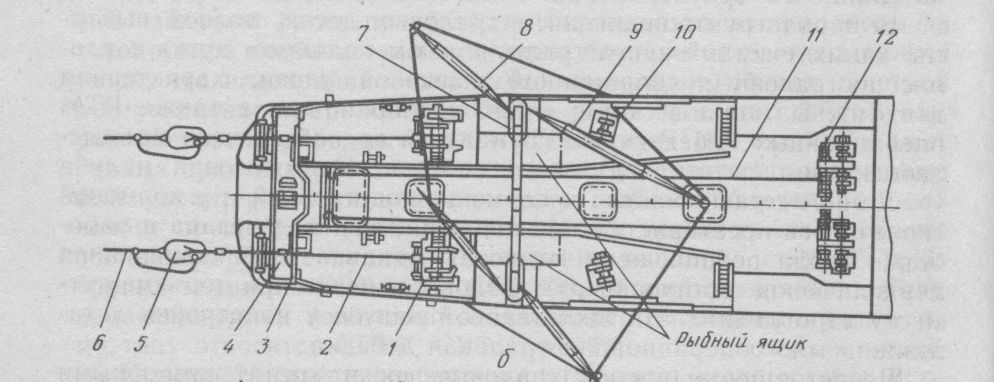
Рис. 70. Промысловая схема кормового траулера с однооперационными лебедками.
1.Ваерная лебедка, 2.ваер, 3.подвесной ваерный блок, 4.кормовой переходный мостик, 5.траловая доска, 6.кабель, 7.кормовой портал, 8,9. кормовые стрелы, 10.грузовая лебедка, 11.вытяжной конец, 12.кабельновытяжная лебедка.
Схема с однооперационными лебедками, описанная выше, имеет тот недостаток, что операция по выборке канатно-сетной частей трала ведется прерывисто путем перестропок. Развитием этой схемы стали схемы с применением сетных барабанов. В этих схемах нет кабельно-вытяжных лебедок и комбинированных лебедок. Вместо них устанавливается один или два (если схема «Дубль«) сетных барабана, на которые навиваются кабели, голые концы, канатная часть трала и его мотенная часть. Такая схема применена на судах РКТ-С пр. А-488 типа «Моонзунд», где установлены два сетных барабана.
За рубежом уже более 10 лет эксплуатируют кормовые безслиповые траулеры с однооперационными лебедками. Это суда типов «Veronica» и «Atlantic Dawn». На этих судах мешок с уловом на промысловую палубу не поднимают, а улов выливают с помощью мощных погружных рыбонасосов.
5.7.2. Промысловые схемы сейнеров.
Сейнеры предназначены для работы кошельковыми неводами. На них промысловые механизмы так же размещают в определенном порядке, образуя ту или иную промысловую схему. Простейшая схема состоит из сейнерной лебедки, подвесной неводовыборочной машины (ПМВК) и грузовой стрелы с грузовой лебедкой, расположенной прямо на стреле. Чаще применяется схема с двумя ПМВК, из которых один используется для выборки невода, а второй для его укладки. Пример такой схемы показан на рис. 71.
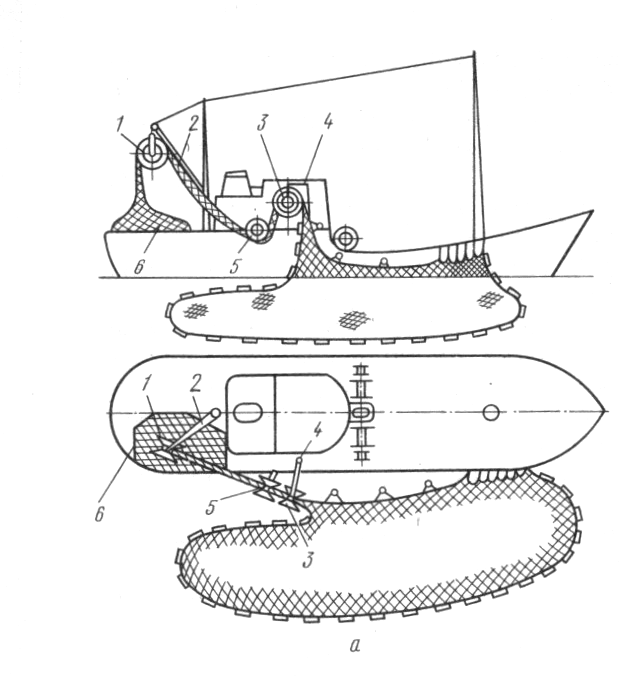
Рис. 71. Схема сейнера с двумя ПМВК.
1.ПМВК для укладки невода, 2.кормовая стрела, 3.ПМВК для выборки невода, 4.выстрел, 5.жгутоформирователь, 6.неводная площадка.
На крупных сейнерах для уменьшения опрокидывающего момента при выборке невода применяют низко расположенный агрегат с тремя рабочими органами – неводовыборочную машину типа «Триплекс». Пример приведен на рис. 72.
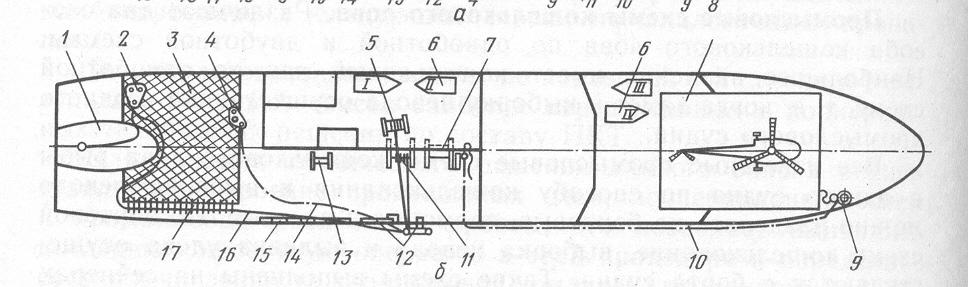
Рис. 72. Схема супер сейнера пр. В-406 типа «Родина».
1.Скиф, 2.пятное крыло невода, 3.неводная площадка с неводом, 4.бежное крыло невода, 5.лебедка бежного крыла, 6.спидботы, 7.носовая сейнерная лебедка, 8.площадка поискового вертолета, 9.шпиль, 10.подтяжной трос, 11.кормовая сейнерная лебедка, 12.нот-балка с устройством для приема стяжных колец, 13.дроссельная лебедка, 14.бежной урез, 15.рол для подсушки сливной части, 16.стяжной трос, 17.укладка стяжных колец.
5.7.3. Промысловые схемы дрифтеров.
Сетной дрифтерный лов во многих районах океана запрещен, но есть районы, где он еще существует. Промысловые схемы должны обеспечить выборку сетей и их постановку. Лучше всего это организовано в промысловых схемах с двумя площадками. На рис. 73. показана промысловая схема японского дрифтера с двумя площадками.
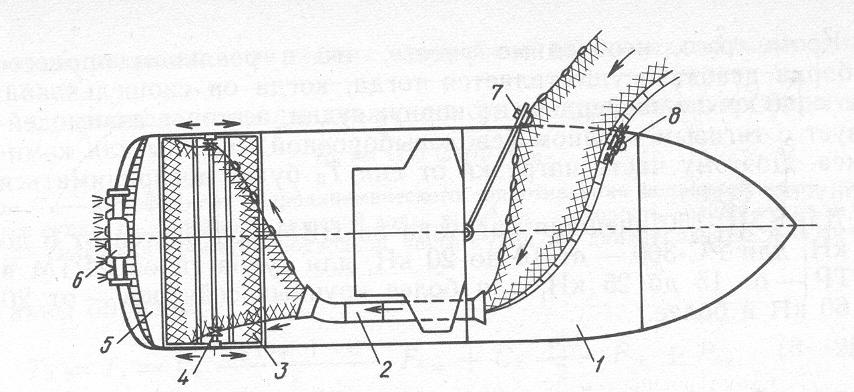
Рис. 73. Промысловая схема дрифтера.
1.Носовая площадка, 2.сетевод, 3.контейнеры, 4.комплекс механизированной укладки сетей, 5.кормовая площадка, 6.приводной фрикционный рол, 7.подвесная машина для выборки верхней подборы, 8.палубная машина для выборки нижней подборы.
5.8. Промысловые операции тралового лова.
Промысловые операции при траловом лове делятся на подготовительные и собственно операции лова. Подготовительные операции имеют широкую номенклатуру и начинаются они на берегу до начала рейса. После комплектования экипажа, капитан получает рейсовое задание, в котором оговаривается район промысла, объекты лова, сроки рейса, показатели по добыче и выпуску готовой продукции. Капитан после получения рейсового задания должен подготовиться к рейсу: изучить всю имеющуюся информацию о районе и объектах лова, относящуюся к срокам рейса. По возможности он должен ознакомиться с судном путем выхода на короткие ходовые испытания, продолжительностью несколько часов. В ходе этих испытаний капитан получит информацию о тяговых характеристиках судна. По возвращении в порт, капитан обосновано может заказать у судовладельца набор тралов, подходящих ему в начале, середине и в конце рейса. После выхода в рейс необходимо подготовить тралы к промыслу. Тралы поступают на судно в разобранном виде и без оснастки. В целях удобства транспортировки, тралы поступают на судно в виде части 1 – канатная часть и первая часть мотни, и часть 2 – остальная мотня. Отдельно поступают траловые мешки. На судне необходимо собрать части 1 и 2 трала и присоединить к тралу мешок. Кроме того, необходимо верхнюю подбору оснастить подъёмным щитком и антенной ИГЭКа, а нижнюю подбору якорными цепями. Если на судне нет набора голых концов и кабелей, то из имеющихся запасов стальных канатов надо изготовить по восемь голых концов и по четыре кабеля на каждый трал (если на судне схема «Дубль», то вооружаются сразу два трала). К указанному количеству деталей тросовой оснастки необходимо сделать запасные концы. Необходимо подготовить грузы-углубители, промерить ваера, намотать на кабельно-вытяжные лебедки вытяжные концы, переходные концы, кабеля и голые концы. К голым концам присоединить крылья трала. Работа на промысловой палубе предстоит большая, поэтому ее надо планировать да еще с учетом того, что при следовании судна в рыболовных зонах государств, не отмеченных в рыболовном билете вашего судна, всякие работы с орудиями лова запрещены. По этой причине капитану следует очень внимательно распланировать подготовительные к промыслу работы.
По прибытии в промысловый район, капитан должен распорядиться, а его помощники должны выполнить предварительный поиск полей скоплений объектов промысла. При поиске используется специальная техника и все знания и умения штурманского состава. Штурманам необходимо уметь пользоваться поисковыми эхолотами и гидролокаторами, приемо-индикаторами спутниковых РНС, а также специальными океанографическими приборами. К таким приборам относятся: термометры, батометры, термобатиграфы, грунтовые трубки диски Секки и др. Часть из названных приборов показана на рис. 74.
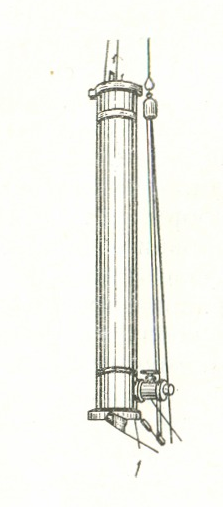
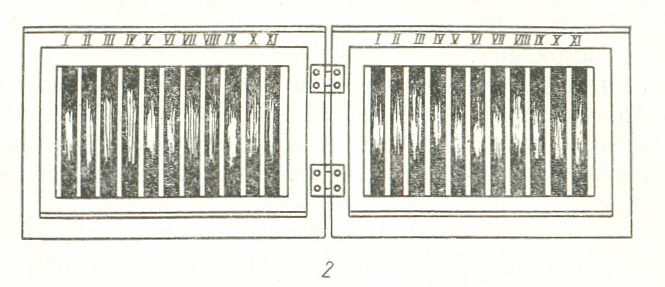
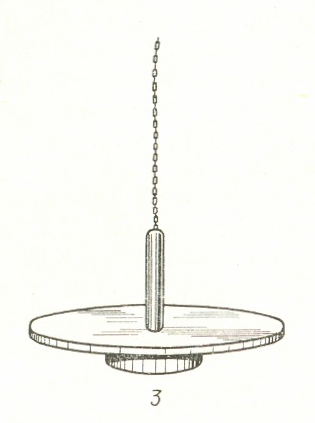
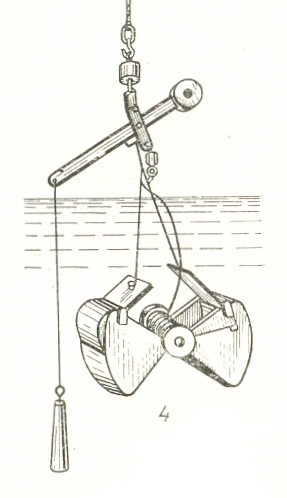
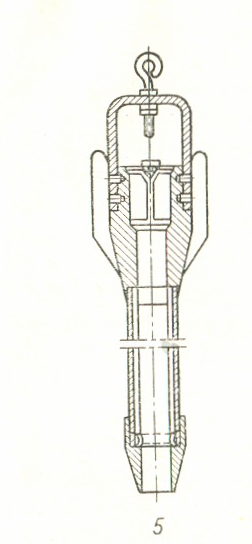
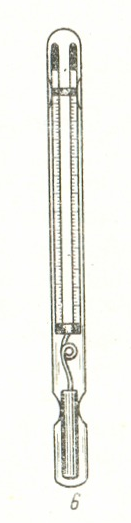
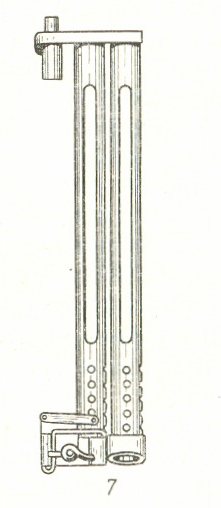

Рис. 74. Некоторые океанографические приборы.
1.батометр, 2.шкала цветности, 3.диск Секки, 4.дночерпатель, 5.грунтовая трубка, 6.термометр, 7.рама термометра, 9.планктонная сеть.
После предварительного поиска экипаж судна может приступать к промыслу.
Промысел начинается с поиска конкретного косяка, по которому будет отдан трал. После нахождения такого косяка, штурман маневрирует в точку постановки трала. Положение этой точки зависит от погоды. При слабом ветре (ветер до 3-х баллов) курс траления может быть любым, чаще всего – вдоль изобаты или по ветру. В этом случае штурман должен так отвести судно от косяка, чтобы от точки постановки трала и до косяка палубная команда и промысловые механизмы успели отдать трал, и навести его на нужный горизонт. В свежую погоду (ветер 4 балла и более) курс траления всегда совпадает с направлением ветра, а отдают трал против ветра. В этом случае трал можно отдавать сразу после обнаружения косяка, т.к. в процессе отдачи судно будет уходить на ветер от косяка. После отдачи трала до досок судно совершает пологую циркуляцию на курс траления и дистанции отхождения от косяка должно хватить на то, чтобы вывести трал на нужный горизонт.
5.8.1. Операции по отдаче трала на траулере бортового траления.
Судно ставят рабочим бортом к ветру без хода, т.е. ложатся в дрейф рабочим бортом к ветру. До отдачи трала после циркуляции на переднем ходу для принятия позиции – ветер в рабочий борт, необходимо погасить скорость, работая ходом назад так, чтобы не было движения судна ни в нос, ни в корму. По команде вахтенного помощника капитана: «Пошел трал» палубная команда отдает куток трала за борт судна. Судно под действием ветрового давления дрейфует, появляется скорость от рабочего борта, которая вызывает сопротивление движению в воде части мешка. Под действием этой силы стягивается за борт весь мешок, мотенная часть и канатная часть трала. Натягиваются голые концы, намотанные на навивные барабаны траловой лебедки. Навивные барабаны траловой лебедки кулачковыми муфтами подсоединены к грузовому валу лебедки и ленточные тормоза отпущены. Травление голых концов и кабелей осуществляется лебедкой «в электрическую», т.е. с помощью приводного двигателя. При подходе к подвесным ваерным блокам места соединения кабелей и усов переходных концов – «Стоп» травить ваера. Матросы, расписанные на носовой и кормовой траловых дугах, подсоединяют к кабелям лапки досок. После выполнения операции – «Майна ваер помалу». В этом случае нагрузка от трала передается через кабеля, через лапки досок, через корпуса досок на цепные стопора и на корпус судна. Разгружаются ваера, которые без нагрузки падают на палубу. Матросы берут слабину ваеров и подтаскивают место соединения ваера и переходного конца к шкентелям досок (носовой и кормовой) и присоединяют шкентели к ваерам. После окончания операции – «Вира оба ваера помалу». Доски подтягивают к ваерным блокам – «Стоп», отсоединяют цепные стопоры, после чего «Майна обе доски до воды» и «Стоп». После того, как доски опустили до воды, судну дают малый ход вперед и начинают плавную циркуляцию, приводя судно в положение по ветру. При циркуляции необходимо следить за тем, чтобы не наехать на свой трал. Когда судно пришло на курс траления (по ветру) выравнивают доски (потравить носовую вровень с кормовой) и дают средний ход вперед. Когда судно набрало ход, начинают травить ваера сначала не первой скорости, а затем на полной. Вахтенный помощник капитана командует лебедчику, сколько ваеров ему надо отдать. Лебедчик обязан сообщать штурману через каждые 100 метров, сколько ваеров за бортом. Штурман должен повторять лебедчику его сообщение с тем, чтобы лебедчик понял, что его сообщение услышано. Недоходя 100 метров до назначенного количества вытравленных ваеров, штурман командует лебедчику: «Трави помалу», а сам уменьшает ход судна до малого. После окончания травления ваеров лебедку останавливают, а штурман доводит ход судна до полного. Начинается сам процесс траления. В начале траления ваера приходится подтравливать, чтобы откорректировать нужный горизонт хода трала, а затем оба ваера берут на стопор путем небольшого отворота судна от ваеров и специального конца – мессенжера. Во время траления штурман следит по ИГЭКу о факте и количестве рыбы, зашедшей в устье трала. Благодаря своему опыту или по времени, он в нужный момент прекращает траление и командует выборку трала.
5.8.2. Выборка трала на траулере бортового траления.
После принятия решения штурманом о выборке трала, он командует по трансляции «Выборка трала», уменьшает ход судна до малого вперед и дает команду «Отдать ваерный стопор», а также командует лебедчику «Вира ваер помалу». После того, как лебедка уверенно начала выбирать ваера, штурман командует «Вира ваер на полную». Лебедчик обязан через каждые 100 метров докладывать штурману о том, сколько ваеров осталось за бортом. Штурман должен повторять сообщение лебедчика с тем, чтобы последний понял, что его сообщение принято. За 100 метров до окончания выборки ваеров штурман командует лебедчику «Выбирать помалу». При подходе досок к траловым дугам лебедчик останавливает лебедку. При этом может случиться так, что доски пришли порознь, т.е. одна отстала от другой. В этом случае у той доски, которая пришла первой к дуге, зажимают ленточный тормоз на ее барабане и отключают кулачковую муфту. Включают лебедку на выборку отставшего ваера – стоп. После чего снова подключают отключенный барабан к грузовому валу: включают кулачковую муфту и отпускают ленточный тормоз. В дуги досок матросы заводят цепные стопоры. Лебедчик потравливает оба ваера так, чтобы доски легли на цепные стопора и разгрузились ваера. Матросы отсоединяют ваера от шкентелей дуг досок. Лебедчик выбирает ваера до подхода места соединения усов переходных концов к кабелям – стоп. Матросы отсоединяют лапки досок. После этого лебедчик выбирает переходные концы, кабеля и голые концы. Когда крылья трала подошли к подвесным ваерным блокам, выборка трала переходит на фрикционные барабаны, поэтому на навивных барабанах зажимают ленточные тормоза и отключают их кулачковыми муфтами от грузового вала. Трал выбирают путем его стропления и выборки сушилками, которые навивают ходовым концом на турачки траловой лебедки. Если улов большой, то его делят с помощью дележного стропа, а начало мешка закрывают с помощью удавного стропа. Для понимания описания отдачи и выборки трала надо пользоваться рисунками 66, 67 и 68.
5.8.3. Отдача трала на траулере кормового траления с многооперационными лебедками.
На траулерах кормового траления ограничений по погоде почти нет, автор целый месяц занимался промыслом в СЗА при силе ветра 9 баллов. Была попытка отдать трал при ветре 10 баллов, но она оказалась не удачной. Следовательно, траловый лов возможен до ветра в 9 баллов, хотя в инструкциях есть ограничение семью баллами. Украинские суда работают в основном в ЦВА в зоне ИР Мавритании, где ветра преобладают силой 5 – 6 баллов. При таком ветре трал отдают против ветра, защищая промысловую палубу надстройкой. После местного поиска и обнаружения косяка или косяков, представляющих интерес для тралового лова, штурман маневрирует судном в точку постановки трала. Эта точка должна отстоять от косяка на ветер с таким расчетом, чтобы после отдачи трала и разворота судна можно было успеть вытравить нужное количество ваеров и направить трал на нужный горизонт хода до появления косяка.
После выхода судна в точку постановки трала, штурман дает малый ход и командует палубной команде отдачу трала. Трал уложен на промысловой палубе «змейкой» кутком мешка к слипу. За куток зацеплен пентр-гак, вытяжной конец заведен на турачку грузовой лебедки. Вытяжной конец от кутка трала проходит через блок, прикрепленный к выстрелу, прикрепленному к кормовому переходному мостику, а затем на турачку грузовой лебедки. По команде штурмана «Пошел трал» включают грузовую лебедку (ее навивной барабан отключен) и куток с помощью вытяжного конца подтягивается к блоку выстрела, с помощью дополнительного конца пентр-гак выдергивается из кутка и мешок падает в кильватерную струю. Под действием силы сопротивления стаскивается весь мешок мотенная и канатная части трала. Натягиваются голые концы на навивных барабанах траловой лебедки. Навивные барабаны траловой лебедки подключены к грузовому валу. С помощью лебедки травят голые концы и кабеля. Тут есть одна тонкость: все голые концы идут под натяжением кроме нижних, т.к. нижние голые концы разгружены силами трения грузов-углубителей о палубу. Для того чтобы слабина нижних голых не соскочила с барабанов через реборды, к барабанам ставят двух матросов (по одному на каждый барабан), которые берут слабину нижних голых руками. Эта операция опасна тем, что матросы стоят лицом к барабанам и спиной к слипу, по этой причине они не могут видеть, когда грузы подойдут к слипу, по которому они скользнут с ускорением и рывком выберут слабину нижних голых концов, при этом матросы могут получить серьезные травмы. Штурман должен следить за процессом движения грузов и своевременно дать команду матросам у лебедки отойти от мест. Когда грузы ушли в воду процесс травления голых концов и кабелей идет без затруднений. При подходе к слиповой канавке места соединения ваеров к переходным концам лебедку останавливают. Два матроса (по одному с каждого борта) подходят к слиповой канавке и присоединяют стопорные концы, которые другим концом присоединены к кормовым грузовым колоннам судна. Матросы отходят, и лебедчик травит ваера до тех пор, пока не натянутся стопорные концы. При этом разгружаются ваера и по два матроса с каждого борта берут слабину ваера и заносят его в подвесные ваерные блоки. После окончания этой операции лебедчик выбирает оба ваера до тех пор, пока точка соединения стопорных концов не подойдет к подвесным ваерным блокам. Матросы отключают стопорные концы. Лебедчик снова выбирает оба ваера до подхода места соединения усов переходных концов к кабелям – стоп. Матросы подсоединяют лапки досок к кабелям. После завершения этой операции лебедчик травит оба ваера. Нагрузка от трала по кабелям и лапкам ложится на доски, а через цепные стопора – на корпус судна, при этом разгружаются ваера. Матросы подтягивают точки соединения ваеров с переходными концами к шкентелям дуг досок и присоединяют ваера к шкентелям. После этого лебедчик слегка выбирает ваера так, чтобы разгрузить цепные стопора, стопора выводят из дуг досок, а доски травят до воды. После этого штурман начинает пологую циркуляцию через удобный для ситуации борт, а лебедчику командует перетравить внешнюю к повороту доску метров на 15. После завершения поворота на курс траления выравнивают доски, и штурман добавляет ход до среднего. Скорость судна в этом случае определяется скоростью травления ваеров лебедок, установленных на судне. Например, скорость травления ваеров 200 метров в минуту – это означает 3.33м/с или около 6.5 узлов; в этом случае скорость судна должна быть не менее 8 узлов с тем, чтобы у досок был ход вперед относительно воды. После того, как судно наберет заданный ход, начинают травить ваера сначала на малой скорости травления, затем на полной скорости. За 100 метров до назначенного количества ваеров штурман снижает ход судна до малого, а лебедчик травит ваера на первой скорости. Начинается процесс траления, в ходе которого может быть придется корректировать длину ваеров.
5.8.4. Выборка трала на траулере кормового траления с многооперационными лебедками.
На судах этого типа уже устанавливались приборы, сигнализирующие о степени заполнения мешка – «Улов» или «Эридан», поэтому для окончания траления у штурмана была более достоверная информация, чем на бортовиках. В общем случае существует правило: рыба должна поступать равномерно в соответствии с мощностью обрабатывающего цеха. Так, если судно способно переработать 60 тон в сутки, то рыба должна поступать с темпом примерно 5 тон за два часа. На практике капитаны редко придерживаются этого правила, а ловят столько, сколько ловится. При таком подходе не редко уловы достигают 25 – 30 тон за траление, при этом рыба сильно задерживается в цехе, теряет качество, а нередко выловленную рыбу выбрасывают за борт.
Выборка трала начинается с объявления штурмана по трансляции (палуба и цех) о предстоящей выборке. По этому объявлению все палубные матросы собираются у своих рабочих мест в кормовой части промысловой палубы, а лебедчик становится у командо-контроллеров траловой лебедки. Штурман снижает ход судна до малого. По команде штурмана «Брать ваера» лебедчик начинает брать ваера на первой скорости, а когда лебедка набрала обороты, то и на полной скорости. О количестве ваеров за кормой лебедчик сообщает штурману, а тот отвечает ему, дублируя его сообщение. Когда за кормой остается 100 метров ваеров, штурман командует лебедчику «Брать помалу». При подходе досок к подвесным ваерным блокам – стоп лебедка. Матросы заводят цепные стопора в дуги досок. После этого – «Майна оба ваера» до тех пор, пока доски не лягут на цепные стопора – ваера разгружаются и их отсоединяют от шкентелей дуг досок. После этого «Вира оба ваера» до тех пор, пока к подвесным ваерным блокам подойдут места соединения лапок досок с кабелями – стоп. Матросы отсоединяют лапки досок. После этого «Майна оба ваера до подхода к подвесным ваерным блокам места соединения ваеров с переходными концами – стоп. Матросы подсоединяют в это место стопорные концы. После этого «Майна оба ваера» до тех пор, пока натянутся стопорные концы и разгрузятся ваера. Матросы берут слабину ваеров, снимают ваера с подвесных блоков и сбрасывают ваера на слип. После этого «Вира оба ваера до тех пор пока на слиповую канавку придут места соединения ваеров, переходных концов и стопорных концов – стоп. Матросы отсоединяют стопорные концы. Далее «Вира оба ваера» до полной выборки ваеров, переходных концов, кабелей и голых концов до подхода грузов к ваероукладчикам траловой лебедки – стоп. Больше навивными барабанами работать нельзя, поэтому у них зажимают ленточные тормоза и отключают кулачковые муфты. Трал на слиповой канавке стропят и строп присоединяют к гаку джильсона, свободный конец джильсона наматывают на турачку траловой лебедки и начинают выборку канатной части трала до подхода гака джильсона к турачке. На слиповой канавке снова стропят трал, присоединяют строп к гаку джильсона другого борта и выбирают новую порцию трала, при этом освобождается первый джильсон. Таким образом, выбирается весь трал и часть мешка. Если улов не большой – его берут одним джильсоном, вытягивая куток на промысловую палубу, если улов большой, то его выбирают двумя джильсонами одновременно. Для этого дель мешка у слиповой канавки обматывают старой делью мешка, все это стропят стальным стропом, с джильсона снимают гак и ставят мощную скобу, которую соединяют с стальным стропом. Немного выбирают мешок (примерно 1 метр) и снова дель мешка обматывают старой делью заводят второй стальной строп, со второго джильсона также снимают гак и скобой соединяют джисон с стропом. Двумя джильсонами берут мешок до тех пор, чтобы угол между джильсонами не был чрезмерно большим. Мешок режут с обоих бортов и выливают на палубу рыбу. После этого, удерживая одним джильсоном мешок, другой джильсон соединяют со стропом, охватывающим освобожденную от рыбы часть мешка. Так до полной выливки улова. Затем открывают крышки горловин бункеров и убирают в них рыбу с палубы. Затем готовят трал к следующему циклу работы: ремонтируют мешок, перебирают трал, снимая с него стропа и укладывая «змейкой» на палубе. Если есть повреждения в трале, то их устраняют.
5.8.5. Отдача трала на траулере кормового траления с однооперационными лебедками.
По этой схеме отдача мешка, мотни и канатной части ни чем не отличается от операций предыдущей схемы. Голые концы натягиваются на кабельно-вытяжных лебедках. Голые концы и кабеля травят кабельно-вытяжными лебедками. При подходе к слиповой канавке места соединения усов переходных концов с кабелями – стоп. Матросы подсоединяют лапки досок. Далее травят вытяжные концы до тех пор, пока нагрузка от трала не ляжет целиком на доски, а через цепные стопора и на корпус судна, разгружаются вытяжные концы. Матросы берут слабину вытяжных концов с палубы и обнося через ограждение слипа, поднимают их к траловым доскам. Там вытяжные концы отсоединяют от переходных концов, а переходные концы подсоединяют к шкентелям дуг досок. Далее подбирают ваера ваерными лебедками так, чтобы разгрузить цепные стопора. Вынимают цепные стопора из дуг досок и травят доски до воды – стоп. Далее также как и при предыдущей схеме.
5.8.6. Выборка трала на траулере кормового траления с однооперационными лебедками.
Начало выборки такое же, как и по предыдущей схеме, до подхода досок к подвесным ваерным блокам. Заводят цепные стопора в дуги досок, майна оба ваера ваерными лебедками так, чтобы доски легли на цепные стопора, а ваера разгрузились. По этой схеме ваера от досок не отсоединяют. Матросы отсоединяют переходные концы от шкентелей дуг досок и соединяют их с вытяжными концами, после чего они сбрасывают на слип вытяжные концы. Включают кабельно-вытяжные лебедки на выборку и выбирают вытяжные концы, переходные концы, кабеля и голые концы, после чего кабельно-вытяжные лебедки отключают. Трал на слиповой канавке стропят и стропы подсоединяют к шкентелям комбинированных лебедок. Таким образам, работая двумя шкентелями двух комбинированных лебедок, выбирают трал и часть мешка. Улов выбирают лебедками гинь-талей, одной или двумя в зависимости от улова. После выборки трала и выливки улова трал готовят к следующему циклу: чинят мешок, перебирают трал, вынимая из него стропы, и укладывают трал на палубе «змейкой».
5.9. Промысловые операции с кошельковыми неводами.
В Украине кошельковый промысел сохранился только в Азовском море. Объектами промысла являются: хамса, тюлька и пелингас. Промысел ведется с судов типов СЧС-225 и РС-300. Оба судна имеют примерно одинаковые промысловые схемы с неводной лебедкой, двумя неводовыборочными машинами и жгутоформирователем.
Промысел начинается с поиска косяка. Когда косяк найден, капитан маневрирует судном в точку отдачи невода. Эта точка должна находиться под ветром от косяка так, чтобы после замета ветер был в рабочий борт. По команде капитана отдают водяной якорь, присоединенный к пятному клячу. Под действием сопротивления якоря с неводной площадки стягивается невод, а судно совершает пологую циркуляцию длиной, равной длине невода. В ночное время над косяком сбрасывают светящийся маячок, с использованием современной техники (дисплей системы GPS) хорошо видно весь замет и пятной кляч. Все это помогает сделать верный замет так, чтобы в конце замета подойти к пятному клячу. В Азовском море применяется схема замета с проводником, поэтому во время замета травят неводной лебедкой стяжной трос и проводник, а когда судно приходит на противоположный по диаметру от точки замета конец, проводник выбирают. После окончания замета выбирают Пятной кляч и крепя его на специальный кнехт. Затем начинают выбирать стяжной трос. Стяжной трос проходит через блок Т-образного опрокидывающегося выстрела. По мере выборки стяжного троса его петля уменьшается до тех пор, пока эта петля не будет занята плотно уложенными стяжными кольцами. На этом завершается операция кошелькования невода и начинается операция его выборки. К бежному клячу невода присоединен бежной урез, который проведен через первую неводовыборочную машину, через жгутоформирователь и через вторую неводоукладочную машину. На первых 15 метрах бежного крыла нет никакой оснастки: ни наплавов, ни колец, поэтому при включении на «Вира» обеих неводовыборочных машин невод легко проходит через них. Затем начинаются кольца с уздечками, которые препятствуют выборке невода. Здесь возможны два случая: либо разъёмные кольца (кольцо размыкают и снимают с петли стяжного троса), либо неразъёмные кольца (тогда их привязывают с помощью специальных концов к уздечкам и при выборке эти концы развязывают). Так как выборка невода осуществляется только за верхнюю подбору (нижняя подбора не нагружена) то он под нагрузкой деформируется. Исходя из этого, при постройке невода надо делать нижнюю подбору на 10% длиннее верхней (помимо геометрического неравенства). После завершения выборки невода за бортом остается сливная часть, которую подсушивают и приступают к выливке улова. Мелкие объекты выливают с помощью рыбонасоса, а крупные – каплером.
4. Элементы механики орудий лова.
4.1. Внешние силы, действующие на орудия лова.
Для лучшего понимания принципов работы орудий промышленного рыболовства студентам специальности СВ необходимо дать в небольшом объеме механику орудий лова. В механике орудий лова рассматриваются проблемы взаимосвязи между формой орудия лова и внешними силами, действующими на него. Кроме того, рассматриваются вопросы замены реальных орудий их расчетными схемами. Сами расчетные схемы позволяют по внешним силам и по форме орудия лова рассчитать внутренние силы, и на этой основе подобрать прочные сечения деталей орудий лова.
К внешним силам, действующим на орудия лова, относятся: гидростатические силы; гидродинамические силы, усилия, развиваемые рыбой; силы взаимодействия с грунтом.
4.1.1. Гидростатические силы.
Гидростатические силы – это силы плавучести, создаваемые поплавками, топящие силы, создаваемые грузилами и силы, действующие на полые тела и создаваемые гидростатическим давлением. Гидростатическое давление зависит от плотности воды и глубины погружения тела
РГСт= ρ*Н, (22)
где ρ – плотность воды, кг/м3,
Н – глубина погружения, м.
Гидростатическое давление может сжимать пенопластовые поплавки или надувные буи и уменьшать их силу плавучести. Кроме того, давление может разрушить полые кухтыли, если глубина погружения окажется больше предельной для них. Здесь упоминалась сила плавучести, о которой, в виду ее важности, необходимо поговорить подробней. Сила плавучести есть разница между выталкивающей силой и силой веса. По закону Архимеда на тело, погруженное в жидкость, действует выталкивающая сила, равная весу жидкости, вытесненной телом. На рис. 31показаны эти силы.
Рис. 31. Силы, действующие на погруженное тело.
Сила веса тела равна G= ρT*VT(23)
Выталкивающая сила равна Q=ρB*VT(24).
Тогда сила плавучести будет равна P=Q–G=VT(ρB–ρT) (25).
Характеристика VTиногда трудно определяемая, поэтому ее можно заменить значением, определенным из (23)VT=G/ ρTи получим
Р = G(![]() )
(26)
)
(26)
С помощью (26) можно считать силы плавучести, если плотность тела меньше плотности воды, и топящие силы, если плотность тела больше плотности воды, при этом в выражении (26) плавучесть получится с отрицательным знаком, что говорит о направлении действия силы (за положительное направление принято направление вверх), знак в расчетах не учитывается.
4.1.2. Гидродинамические силы.
К гидродинамическим силам относятся силы сопротивления, подъемные и распорные силы. Эти силы обусловлены особенностями обтекания тел, буксируемых в воде или неподвижных тел, на которые набегает течение. Природу гидродинамических сил студенты изучают в дисциплине «Гидравлика и гидроприводы», поэтому здесь мы этот вопрос рассматривать подробно не будем. Отметим лишь, что полную гидродинамическую реакцию принято раскладывать на составляющие в прямоугольных системах координат. Одна из этих систем - поточная, в ней ось Х совпадает с вектором скорости, ей перпендикулярна ось Y. Вторая система координат – связанная, в ней осьX1(или τ) совпадает с какой-то линейной характеристикой тела (например, для крыла с хордой), а парой для нее – осьY1(илиn). Гидродинамические силы широко используются в орудиях лова. Например, для раскрытия трала по горизонтали используются распорные траловые доски. При их буксировке возникают силы распорная и сопротивления. Формулы, по которым рассчитываются эти силы, были приведены ранее (2 и 3).
В механике орудий лова принято разделять методики расчетов гидродинамических сил по виду обтекаемых тел. Сначала рассматриваются тела стабильной формы: шар, цилиндр и пластина.
4.1.2.1. Шар.
Методика расчета сопротивления шара сводится к следующим последовательным операциям:
расчет площади сопротивления шара – F=
 ,
,определение плотности воды – ρВ=1021.3-0.2t+0.743S, гдеt- температура воды,S– соленость воды, промилле;
пересчет скорости с узлов в м/с – V(м/с)=0.5144V(узлы),
определение кинематической вязкости – υ=(1.69-0.03t+0.002S)*10-6,
определение числа Рейнольдса – Re=
 ,
,определение коэффициента сопротивления CX– Приложение 3 [1],
определение сопротивления RX= CX
 .
.
4.1.2.2. Цилиндр.
Расчет площади сопротивления цилиндра F=l*d,
вторая – пятая операции такие же, как у шара,
определение коэффициента сопротивления бесконечного, перпендикулярного цилиндра – Приложение 4 [1].
определение поправки на удлинение к1=0.53+0.017λ-2.37*10-4λ2, где λ=l/d, цилиндр с λ>40 считается бесконечным,
определяется поправка на угол между осью цилиндра и вектором скорости к2= 0.25+sin3α,
определение сопротивления RX=CX*k1*k2
 .
.
4.1.2.3. Пластина.
У пластины определяется не только сопротивление, но и подъемная или распорная сила. Коэффициенты Сxи Сyзависят от формы крыла в плане, от удлинения и от относительной толщины профиля. Эти характеристики определяются продувками крыльев и, как правило, задаются.
4.1.2.4. Сопротивление плоских сетей.
Плоские сети перпендикулярные потоку:
Rx=Cx![]() Н(27), гдеFН=FФ*d/a,
а Сх=3(2F0/Re)0.07.
Н(27), гдеFН=FФ*d/a,
а Сх=3(2F0/Re)0.07.
Для малых чисел Reможно использовать другие зависимости
R90=1800![]() ГV2(28) илиR90=1080
ГV2(28) илиR90=1080![]() (29)
(29)
Для сетей параллельных потоку R0=18FГV2(30) или
R0=18l-0.2FГV1.75(31) или Сх = 0.1Re0.14(32)
Для сетей под углом α к потоку Rα=R0+(R90-R0)α/90 (33) или
Сх=0.0137α-0.00003α2+04477 (34)
Су = 0.0147 α-0.00018 α2+0.0568 (35).
Для конусных сетей RК=R90*χ (36), где χ=0.6+0.42L/D, аR90- сопротивление плоской сети, имеющей площадь πD2/4,L-длина образующей полного конуса. Зависимость (36) пригодна только для малых чисел Рейнольдса, не характерных для тралов. Для тралов можно рекомендовать формулу Зын Ван Вэ.
RК= 112ΔλθFV1.5(37), где Δ=11.7(uXuy)2-10.8(uXuy)+3.4,
λ=0.5+0.1(L/D), θ=0.5+13.2(d/a), а F= πD2/4.
Известно, что трал состоит из делей разного ассортимента, в этом случае реальный набор делей заменяют эквивалентной конусной сетью, имеющей характеристики – шаг ячеи и диаметр веревок средневзвешенные.
 ,dСВ=
,dСВ= ,FOСВ=
,FOСВ= .
.
В этих зависимостях ai,diиFOi– шаг ячеи, диаметр веревки и относительная площадьi-той пластины, аFHi– площадь неттоi-той пластины.
Зависимости (36) и (37) – для полных конусов, а трал представляет собой усеченный конус. В этом случае поступают следующим образом: усеченный конус достраивают малым конусом до полного и считают его сопротивление, затем считают сопротивление малого конуса и отнимают его от сопротивления большого достроенного конуса, получают искомую величину усеченного конуса.
В некоторых случаях сопротивление усеченного конуса можно заменить расчетом сопротивления плоской эквивалентной сети, расположенной под углом α к потоку (метод Дверника А.В.) – Сх=0.04α-0.09 (38)
Зависимостью (38) можно воспользоваться
только при выполнении трех условий: 1.
– чтобы числа Reнаходились
в зонеRe=103-104,
2. – чтобы относительная площадь
находилась в диапазонеFO=0.04-0.3,
3. – чтобы углы атаки находились в
диапазоне α=6-14°. Относительная площадь
рассчитывается по зависимостиFO=![]() .
.
4.1.3. Силы взаимодействия с грунтом.
Взаимодействие орудий лова с грунтом проявляется в трех аспектах: во-первых, трение о грунт деталей орудий лова; во-вторых, резание грунта килями досок донных тралов; в-третьих, взаимодействие с грунтом якорей, удерживающих орудие лова на месте.
Силы трения о грунт деталей орудий лова рассчитываются по известной зависимости и зависят от типов трущихся пар. RTP=f*N(39), гдеf- коэффициент трения, зависящий от трущихся пар (приведен в табл. 4),N– нормальное давление.
Таблица 4. Коэффициенты трения некоторых пар в воде.
-
Материал
Коэффициент трения
Гравий с песком
Мелкий песок
Чугун, сталь
0.47
0.61
Дерево
0.51
0.73
Камень
0.54
0.70
Свинец
0.44
0.53
Мешки с песком
0.63
0.76
Канат растительный
0.70
0.80
Силы резания грунта килями досок донных тралов приводят к появлению дополнительного сопротивления Rxг = 0.5CxгρгV2FК(40)
где Схг – коэффициент сопротивления резания грунта (см. табл. 5),
FК– площадь киля доски.
Таблица 5. Коэффициенты сопротивления резания грунта.
-
Угол атаки, °
10
20
30
40
50
Схг
Илистый песок
3.30
7.50
13.70
18.40
23.40
Песок
5.68
8.62
9.80
15.00
17.10
Силы взаимодействия якорей с грунтом зависят от типов якорей. В рыболовстве применяются как металлические якоря определенной конструкции (чаще всего – адмиралтейские), так и просто мешки с песком или камнями. Последние держат только за счет силы трения и их эффективность не высокая по двум причинам: во-первых, коэффициент трения всегда много меньше, чем коэффициент держащей силы якоря с лапами, зарезающимися в грунт; во-вторых, песок и камень теряют вес в воде намного существенней, чем металл. Несмотря на это рыбаки еще часто применяют якоря в виде мешков с балластом, что, безусловно, можно рассматривать как порочную традицию.
Держащая сила якоря в виде мешка с
балластом рассчитывается по зависимости:
F=G![]() (41), гдеF– держащая
сила,G– вес якоря в воде,f– коэффициент трения
(см. табл. 4), α – угол между оттяжкой к
якорю и горизонтом.
(41), гдеF– держащая
сила,G– вес якоря в воде,f– коэффициент трения
(см. табл. 4), α – угол между оттяжкой к
якорю и горизонтом.
Держащая сила якоря рассчитывается по зависимости F=kG(41), гдеk– коэффициент держащей силы якоря. Для адмиралтейского якоря в зависимости от типа грунтаk= 8-13. Для сравнения эффективности якорей рассмотрим числовой пример. Дано: якорь в виде мешка с песком, массой 60 кг, длина оттяжки равна пяти глубинам. Определить его держащую силу и массу стального адмиралтейского якоря с такой же держащей силой. Решение: при отношении противолежащего катета к гипотенузе 1/5 = 0.2, угол α=11.5°,tg11.5=0.204; по табл. 4 имеемf=0.76 (мелкий песок); вес якоря в воде будет
G=mg(![]() -1)=60*9.81*(
-1)=60*9.81*(![]() -1)=-338.4
н.
-1)=-338.4
н.
Такую держащую силу будет иметь адмиралтейский якорь весом в воде
G=-338.4/10=-33.84 н или массойm= =
= =3.99
кг.
=3.99
кг.
Таким образом, можно убедиться, что стальной якорь простейшей конструкции намного эффективней, чем мешки с песком.
4.2. Расчетные схемы орудий лова.
Реальные орудия лова представляют собой инженерные сооружения особого класса. Их особенностью является то, что в большинстве случаев орудия лова – это пространственные оболочки, причем оболочки проницаемые. Если для расчетов орудий лова использовать опыт из других областей инженерной практики, то очень скоро можно убедиться, что для многих расчетов аналогов нет. Детали орудий лова, как правило, гибкие конструкции, которые не могут работать на сжатие или изгиб, а могут работать только на растяжение. Казалось бы, растяжение – это простейшая деформация: бери силу, дели ее на площадь сечения, получай напряжения, и по допускаемым напряжениям с учетом коэффициентов запаса прочности выбирай прочный размер детали. Однако тут кроится одна, но очень серьезная трудность: под действием внешних сил орудие приобретает сложную пространственную форму, а от этой формы зависят и сами внешние силы. В этих условиях определить вектора сил, приложенных к детали орудия лова чрезвычайно трудно, а часто просто не возможно. Поэтому реальные орудия лова заменяют упрощенными расчетными схемами, расчеты которых дают нам ответы, но с определенными погрешностями.
Чаще всего расчетными схемами являются наборы гибких нитей. Гибкая нить под действием внешних сил может принимать формы:
ломаной линии, если на гибкую нить действует несколько сосредоточенных сил;
цепной линии, если на гибкую нить действует система распределенных по длине нити сил;
параболы, если на гибкую нить действует система распределенных по хорде сил.
На рис. 32 показан элемент гибкой нити и ее геометрия и статика.
Рис. 32 Элемент гибкой нити.
На рис. 32. изображена гибкая нить длиной – S, на верхнем конце – сила Т, под углом к горизонту α и ее составляющиеTxиTy. На нижнем конце действует силаToпод углом к горизонту α0и ее составляющиеToxиToy. Нижний конец гибкой нити идет на глубине Н и на расстоянии от верхнего конца по горизонтуL. Нить находится под действием двух систем распределенных сил: сил веса, интенсивностьюq, и сил гидродинамического сопротивления, интенсивностью к.
Интенсивность сил веса можно определить по:
q=mg![]() ,
(39) гдеm– масса одного
метра гибкой нити;
,
(39) гдеm– масса одного
метра гибкой нити;
интенсивность сил сопротивления можно определить по:
k=1.1![]() (40),
гдеd-диаметр гибкой нити.
(40),
гдеd-диаметр гибкой нити.
Если представить, что изображенная на рис. 32 гибкая нить – это ваер, спроектированный на ДП судна, то можно найти:
T0y=GД+GГУ, гдеGД– вес траловой доски в воде,GГУ– вес грузов углубителей в воде.
T0X=0.5RXTP.
Тогда α0=![]() (41)T0=
(41)T0=![]() (42)
(42)
Из q,kи α0 можно получить служебные коэффициентыa,b,mиB:
a=![]() (43),b=1/a(44),m=
(43),b=1/a(44),m=![]() (45),B=
(45),B= (46).
(46).
После чего можно получить остальные недостающие элементы.
T=T0+q*H,
(47) α=arccos (48),
S=
(48),
S=![]() (49), p=
(49), p=![]() (50)
(50)
L=pln![]() (51).
(51).
Рассмотрим еще несколько расчетных схем. Представим простейшую модель траловой системы, где судно представлено материальной точкой, трал - материальной точкой и Ваер – прямой стержень (рис. 33).
Рис. 33. Простейшая модель траловой системы.
Если система находится в равновесии, то можно написать
G*L=R*Hи тогдаH=G*L/R(52). Получили очень важный вывод о том, что горизонт хода трала линейно зависит от веса досок и грузов углубителей в воде, от длины ваеров (L=S*cosα), и гиперболически зависит от сопротивления трала. Если величину сопротивления представить упрощенноR=k*V2, то становится понятным, насколько сильна зависимость горизонта хода от скорости траления.
Рассмотрим упрощенную модель передней части трала (Рис. 34)
Если представить для упрощения, что P=G, то равновесие моментов относительно точки А дает:P*L=R/2*h/2, от кудаh=4P*L/R(53), т.е. вертикальное раскрытие трала линейно зависит от сил оснастки подбор и длины кабелей с голыми концами, и обратно пропорционально от квадрата скорости траления.
Рассмотрим простейшую модель траловой системы в горизонтальной плоскости (рис. 35)
Рис. 34. Передняя часть трала.
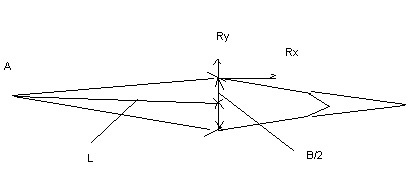
Рис. 35. Горизонтальная проекция траловой системы.
На рис. 35 Rx– это сопротивление доски и половина сопротивления трала,Ry– это распорная сила доски,L– проекция длины ваера, В – расстояние между досками. Тогда из уравнения равновесия относительно точки А имеем:Ry*L=Rx*B/2 илиB=2Ry*L/Rx(54)/
Все приведенные модели имеют как преимущества, так и недостатки. К преимуществам можно отнести то, что на этих моделях просто и наглядно видны зависимости основных параметров траловой системы от регулирующих воздействий. К недостаткам можно отнести то, что все модели представлены как проекции на какие-то плоскости и в моделях не учитывается действие на параметры траловой системы сил в перпендикулярных плоскостях. Так в моделях в виде горизонтальных проекций, не учитываются силы плавучести и веса, а в моделях в виде вертикальных проекций, не учитываются распорные силы досок. По этой причине расчеты траловой системы по простейшим расчетным схемам имеют погрешности. Более точное изучение орудий лова возможно лишь на объемных физических моделях.
Здесь не приводятся расчетные схемы других орудий лова, т.к. конспект рассчитан на судоводителей, которым будет достаточно и приведенного материала.