

3.2.2. Оптимальне керування тк з послідовно працюючими агрегатами
Ця система з’єднання агрегатів неперервної дії (АНД) також поши-рена, як і попередня. Головна її перевага – це простота міжагрегат-них зв’язків. Схема такого ТК з позначенням основних змінних наведе-на на рис. 3.4.

Постановка підзадачі координації задачі оптимального керування та-ким комплексом має вигляд:
n
å ji(xi,xi-1) max, (3.18)
i


xi = f (xi-1), (3.19)
W:
xi Î xi мin, xi max, (3.20)
де (3.18) – цільова функція, а (3.19) – математична модель зв’язків, при-чому для такої структури ТК вона одночасно є і математичною моделлю ланки.
Вибір методу розв’язання цієї задачі так, як і в попередньму випад-ку, залежить від виду цільової функції і виконується аналогічно. Якщо лінійна цільова функція має такий вигляд
ji(xi, xi-1) = ai + bi xi-1 + ci xi, (3.21)
то співвідношення (3.18) після перетворень можна записати таким чи-ном:
n n
å
ai
+
å
(bi+1+ci)xi,
+ b1
x0
+ cn
xn
max
(3.22)

i i
У цьому випадку задача лінійного програмування виявляється виродже-ною, оскільки значення xi визначається знаками при коефіцієнтах. Якщо цільова функція максимізується, то
при bi+1+ci > 0 xi = xi max, (3.23) при bi+1+ci < 0 xi = xi min. (3.24)
Розглянемо більш докладно випадок, коли цільова функція довільна
для розв’язання задачі застосовують метод динамічного програмування (МДП) Р.Беллмана, що є ефективним методом оптимізації багатостадій-них процесів. Ідея методу полягає у заміні багатомірної задачі оптиміза-ції послідовністю задач меншої розмірності, причому така декомпозиція залежить від виду функції цілі і обмежень. В основі МДП лежить сформу-льований Р.Беллманом принцип оптимальності, згідно з яким оптима-льне керування визначається кінцевою ціллю керування і початковим станом системи і не залежить від стану, який передує початковому. Це означає, що для будь-якої траекторії кожна її дільниця, яка зв’язує будь-які проміжну і кінцеву точки траекторії, також є оптимальною траек-торією.
Покроковий розрахунок оптимальних значень змінних керування і змінних стану найчастіше виконують «з кінця», починаючи з останього і закінчуючи першим агрегатом за допомогою рекурентної формули Бел-лмана, записаної для випадку, коли критерій оптимізації максимізується:
Ii*(xi-1, xn*) = max [j i(xi-1, xi) + Ii+1*(xi, xn*)] (3. 25)
xi-1 ÎWx
Таким чином, на i-му кроці оптимальне управління вибирають з умов максимуму двох членів суми, що містяться у квадратних дужках, з яких другий Ii+1* – відповідає оптимальному значенню критерію на попередьо-му (i+1)-му інтервалі, а перший j i за допомогою xi-1 змінюють так, щоб максимізувати суму у квадратних дужках.
Процес розв’язання задачі за допомогою МДП поділяють на два ета-пи. На першому – для кожної наступної ланки (кроку) записують таб-лично чи аналітично залежність, що зв’язує xiопт і j iопт з входом даної ла-нки xi-1, а на другому – знаходять конкретні значення xi* і j i*.
Розглянемо детальніше процес розрахунку оптимального керування для випадку, коли задано вихід ТК і задачу розв’язують «з кінця». Споча-тку при заданому xn* знаходять таку величину xn-1 , при якій функція цілі для останьої ланки була б максимальною, тобто виходячи з (3. 25) і враховуючи, що In+1 = 0, отримаємо
In*(xn-1, xn*) = max [ j n(xn-1, xn*)]. (3. 26)
xn-1
У цьому виразі xn* – задане число, тому процедура максимізації ці-льової функції непотрібна і необхідне значення xn-1опт може бути знайде-не з математичного опису n-ї ланки
xn-1опт = f n (xn*). (3. 27)
На другому кроці оптимізації до останьої ланки приєднують (n-1)-у ланку і визначають xn-2 так, щоб функція цілі для двох ланок була б мак-симальною. При цьому дві ланки розглядають як одну з виходом xn* і входом xn-2
In-1*(xn-2, xn*) = max [ j n-1(xn-2, xn-1) + In*(xn-1, xn*)]. (3. 28)
xn-2
Одночасно визначають залежність
xn-2опт = f n-1 (xn*, xn-1). (3. 29)
Далі до двох ланок додають 3-тю, 4-ту і т.д. Дійшовши до 1-ї ланки, знаходять xо, що забезпечує максимум функції цілі всієї системи
I1*(xо, xn*) = max [ j 1(xо, x1) + I2*(x1, xn*)], (3. 30)
xо
xоопт = f1 (xn*, x1). (3. 31)
На другому етапі оптимальні зв’язки розраховують за формулами:
xn-1* = f n (xn*),
xn-2* = f n-1 (xn*, xn-1*),
. . . . . . . . . . . . . . . . . .
xо* = f1 (xn*, x1*).
У тому випадку, коли ні вхід, ні вихід системи не задані, не має зна-чення з кінця чи зпочатку технологічного комплексу починають розраху-нок, але при цьому вхід ТК xо чи його вихід xn є функціями, а не заданими числами, що збільшує розмірність задачі, яка розв’язується.
Розглянемо випадок, коли задачу ускладнює наявність рециклу (по-вернення) продукта. Такі системи застосовують у випадку, коли ступінь вилучення продукту з сировини при одноразовому проходженні ланцюж-ка послідовних агрегатів виявляється малою і потрібно повторити про-цес. Схема такого комплексу зображена на рис. 3.5.
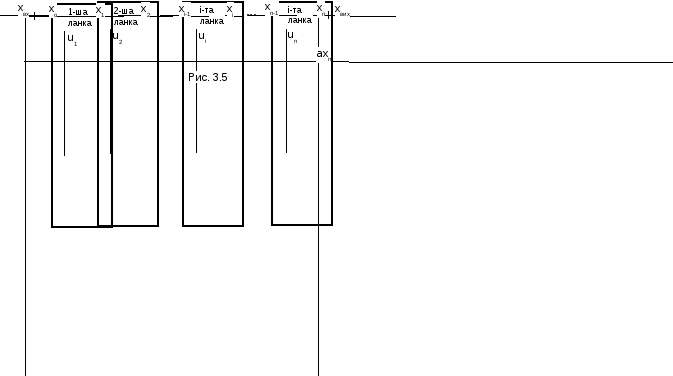
Цю задачу прагнуть звести до попередньої з урахуванням таких співвідношень
xвх = xо - axn , xвих = xn (1 - a), (3. 32)
де a – ступінь рециркуляції. Якщо вхідні і вихідні змінні системи вільні, то задачу оптимізації розв’язують для відповідної розімкнутої системи, а по-тім визначають xвх та xвих, використовуючи (3. 32). Якщо вхідні і вихідні змінні xвх* та xвих* задані, то задача керування зводиться до оптимізації розімкнутої системи із заданими входом xо* і виходом xn*
xо*= xвх*+ [ axвих/(1- a)], xn*= xвих*/(1- a). (3. 33)
Аналогічно чинять, коли задане лише xвх* або тільки xвих*.
Розрахунок можна також вести за методом розриву зворотніх зв’яз-ків. У цьому разі величину xо вважають незалежною змінною, а рівняння зв’язку, пов’язане з рециклом – обмеженням у формі рівності, накладе-ним на змінні величини. Далі розрахунок ведуть за будь-яким методом, який застосовують для розрахунку систем послідовної структури.