

2.2 Вибір технічних засобів автоматизації
2.2.1 Вибір вимірювальних перетворювачів
Для реалізації розробленої структури необхідно вибрати датчики положення ліфта, маси вантажу, прискорення та протипожежний датчик.
В якості датчика положення ліфта застосуємо датчик HMC1001 фірми Honeywell. Внутрішня структура цього датчика (рисунок 2.3) являє собою четирехплечій резистивний міст, кожен елемент якого являє собою анізотропний магніторезістор опором близько 850 Ом. Крім вимірювального моста, даний пристрій містить дві допоміжні котушки: котушку зміщення (offset) і котушку установки / скидання (S / R) [13].
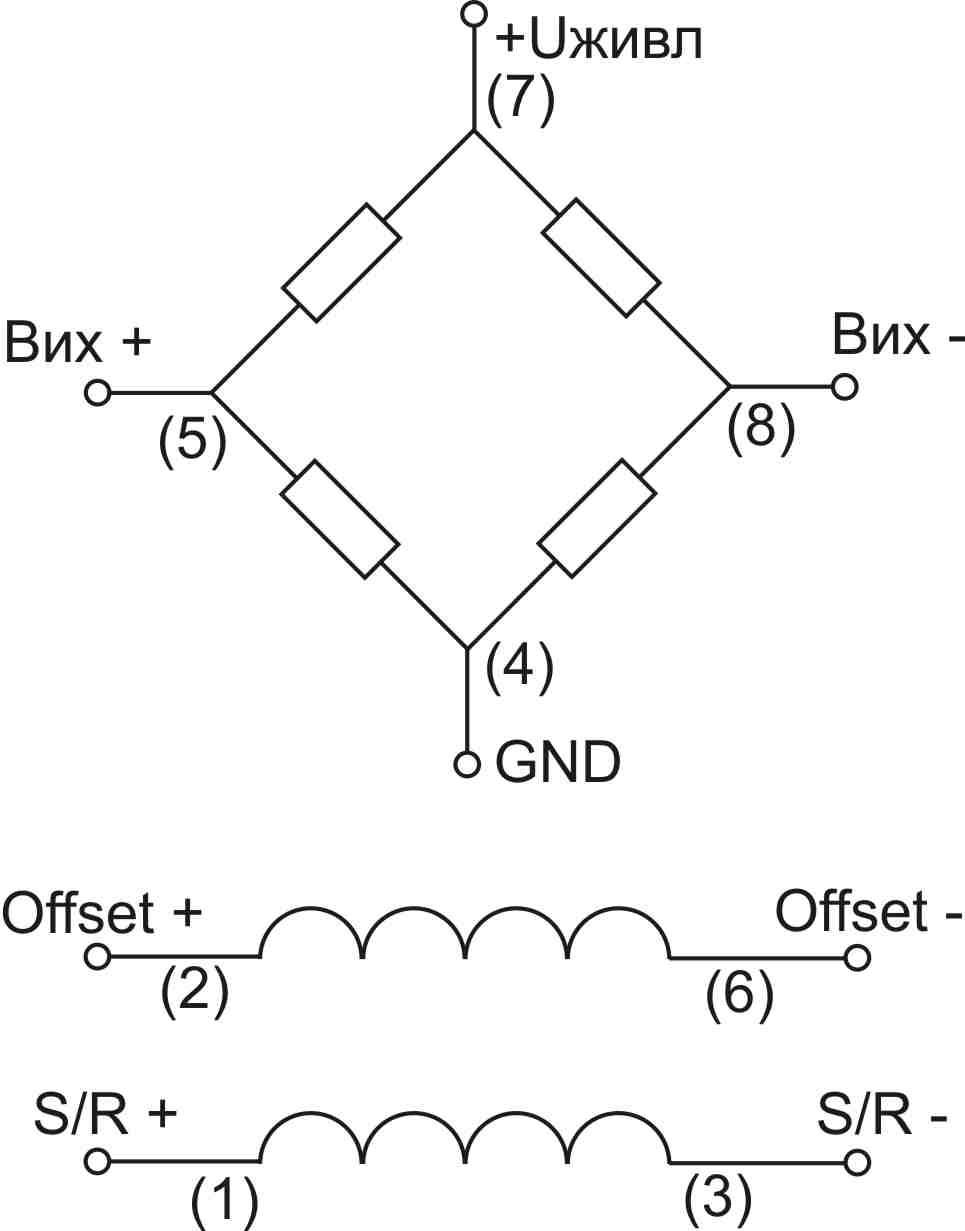
Рисунок 2.3 – Внутрішня структура датчика HMC1001
Після подачі живлення (від 5 до 12В) датчик починає вимірювати напруженість зовнішнього магнітного поля, що діє вздовж його чутливої осі. Це поле викликає зміну опору плечей моста. При цьому різниця потенціалів на виході моста зміниться на V = S * H * Uживлі буде рівною декільком десяткам мВ. Тут S = 1,5-2% - коефіцієнт АМР-ефекту, Uживл- напруга живлення моста, H - напруженість прикладеного магнітного поля.
Передавальна характеристика датчика наведена на рисунку 2.4. Характеристика має два максимуми, за межами яких прагне до нуля.

Рисунок 2.4 – Передавальна характеристика датчика HMC1001
Мостовий магніторезистивний датчик має вісь переважного намагнічування, яка примусово формується вбудованої котушкою Set / Reset. Максимальна чутливість досягається при дії зовнішніх полів, спрямованих перпендикулярно цій осі. У початковому стані, відразу після виготовлення або в результаті впливу руйнуючої магнітного поля величиною більше 15*10-4Т, магнітна структура плівок моста не визначена. Це пояснюється хаотичною орієнтацією її магнітних доменів. Такий стан датчика не придатний для вимірювання зважаючи нульову чутливість. Подача короткого інсталяційного імпульсу струму від 2 до 5А тривалістю від 1 до 2мкс через котушку SET / RESET формує поле, що орієнтує магнітні домени всіх плівок сенсора в одному напрямку, який і називається легкої віссю. Ця процедура повертає прилад у режим максимальної чутливості і відновлює всі його характеристики, що зберігаються до чергового попадання сенсора в сильне магнітне поле.
Після встановлення датчика треба в автоматичному режимі компенсувати зміщення яке створюється, як правило, ззовні через те, що поблизу сенсора знаходиться великий феромагнітний об'єкт. Це поле компенсується за допомогою другої вбудованої в сенсор котушки OFFSET. Функціонально котушка OFFSET являє собою резистор з опором від 3 до 4 Ом. Котушка розміщена поруч з мостом і має строго певну геометрію. Вона здатна згенерувати магнітне поле в тому ж напрямку, що і вимірюване поле. Для цього необхідно пропустити через неї струм певної величини і полярності. Для прикладу, котушка формує поле в 10-4Т при постійному струмі через неї 50мА. Іншими словами, якщо через котушку НМС1001 протікає струм 25мА, то до діючого зовнішньому магнітному полю добавиться поле величиною 5*10-5Т. Якщо змінити напрямок струму, то з цього ж поля відбудеться віднімання 5*10-5Т.
Крім компенсації зсуву та усунення паразитних полів, за допомогою OFFSET можна робити автокалібровку посилення моста в процесі роботи. Ця процедура необхідна, коли датчик працює в умовах постійно мінливої навколишньої температури.
Система вимірювання положення компенсаційним методом за допомогою датчика HMC1001 представлена на рисунку

Рисунок 2.5 - Система вимірювання положення компенсаційним методом
Така система при будь-якому вимірюваному полі буде прагнути звести напругу на виході моста до нуля. Величина ж поля оцінюється за значенням компенсуючого струму через котушку OFFSET. Така вимірювальна схема характеризується дуже високою лінійністю і температурною стабільністю.
В якості датчика маси вантажу застосуємо датчик H8C-C3-5.0t-6B фірми Zemic. Зовнішній вигляд датчика представлений на рисунку 2.6.
В основі принципу роботи тензорезистора лежить широко відомий ефект зміни опору провідника при зміні його площі поперечного перерізу і довжини. На практиці це означає, що вимірюється зміна електричного опору решітки тензорезистора при її механічної деформації.

Рисунок 2.6 - Зовнішній вигляд датчика H8C-C3-5.0t-6B
В датчику використовується мостове з’єднання чутливих елементів (рисунок 2.7).
Рисунок 2.7 – Внутрішня структура датчика
В якості датчика прискорення і сейсмодатчика застосуємо датчик LSM320HAY30 фірми STMicroelectronics. Зовнішній вигляд датчика представлений на рисунку 2.8.
Він представляє собою мікромеханічну систему MEMS-сенсор з цифровим інтерфейсом, що складається з 3-х осьового акселерометра і 2-х осьового гіроскопа. LSM320HAY30 дозволяє фіксувати прискорення і кутову швидкість відповідно аж до 16g і 2000 град/с.

Рисунок 2.8 – Зовнішній вигляд датчика LSM320HAY30
Особливість технології виробництва дозволила звести до мінімуму кроссчутливість по осях приладу, максимально знизити тимчасовий і температурний дрейф зміщення нуля.
Структурна схема датчика представлена на рисунку 2.9.

Рисунок 2.9 – Структурна схема датчика LSM320HAY30
Основні характеристики:
напруга живлення 2.4В - 3.6В;
режими зниженого енергоспоживання (power-down і sleep);
3-х осьовий акселерометр;
2-х осьовий гіроскоп;
програмно настроюється динамічний діапазон роботи акселерометра: ± 2g / ± 4g / ± 8 / ± 16g;
програмно настроюється динамічний діапазон роботи гіроскопа: ± 250 / ± 500 / ± 2000 град / с;
вбудований температурний датчик;
SPI/I2C - інтерфейс;
генератор програмного переривання в разі виявлення руху.
В якості датчика пожежі застосуємо датчик ИП212/101-4-A1R. Зовнішній вигляд датчика представлений на рисунку 2.10.

Рисунок 2.10 – Зовнішній вигляд датчика ИП212/101-4-A1R
Датчик представляє собою комбінований інтелектуальний пожежний сповіщувач. Сигнал "Пожежа" може формуватися при досягненні певної середньозваженої сумарної величини декількох факторів ще до того моменту, коли який-небудь з факторів окремо досягне порогового значення.
Так, в інтелектуальному димовому-тепловому сповіщувач проводиться вимір величини питомої оптичної щільності диму і швидкості підвищення температури у відносних одиницях. Навіть за наявності порівняно невеликий оптичної щільності диму підвищення температури зі швидкістю кілька градусів на хвилину з високою ймовірністю відповідає пожежонебезпечної обстановці. Дана логіка роботи комбінованого сповіщувача дозволяє значно скоротити час виявлення займань, що супроводжуються одночасно декількома факторами, і підвищити здатність виявлення "швидких" пожеж. У комбінованому сповіщувачі з оптичним димовим каналом використання інформації по тепловому каналу забезпечує збільшення чутливості по "чорним" димам при горінні пластику, ізоляції кабелю, до рівня димового іонізаційного сповіщувача.