

Физика / ЛЕКЦИИ_1-ый_семестр / 1_МЕХАНИКА / I_Кинематика / ЛК_№2-Кинематика
.doc
Тема 1. Кинематика.
Лекция _№2.
1. Криволинейное движение.
2.Угловая скорость и угловое ускорение.
3. Примеры расчёта кинематических характеристик автомобиля.
1. Криволинейное движение.
П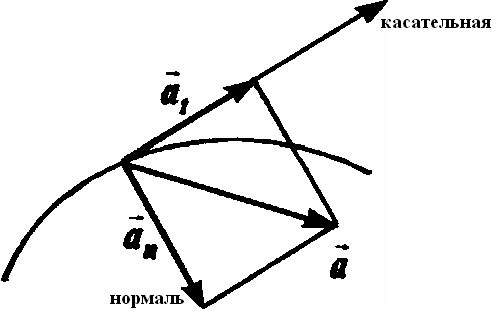 усть
траектория точки – произвольная кривая.
усть
траектория точки – произвольная кривая.
Выберем на ней произвольную точку .
Вектор ускорения можно представить в виде суммы составляющих по двум взаимно перпендикулярным осям: касательной и нормали к кривой.
Определение 1.
Составляющая ускорения, направленная по касательной к траектории, носит название тангенциального ускорения – at, а направленная ей перпендикулярно — нормального ускорения – an.
Получим
формулы, выражающие величины
![]() и
и
![]() через
характеристики движения.
через
характеристики движения.
О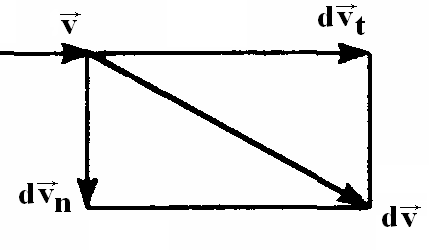 чевидно,
что
чевидно,
что
![]() и
и
![]() .
.
Модуль полного ускорения будет равен:
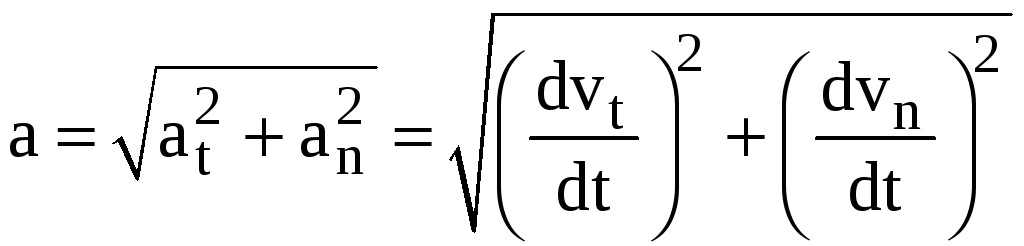 .
.
Формулу для полного ускорения можно записать в более простом и наглядном виде.
При
достаточно малых
![]() приращения
скоростей также достаточно малы.
приращения
скоростей также достаточно малы.
П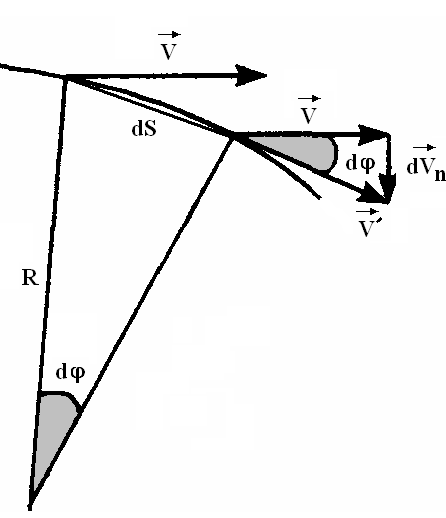 ри
этом, как следует из рисунка, изменение
скорости по величине определяется её
касательной составляющей –
ри
этом, как следует из рисунка, изменение
скорости по величине определяется её
касательной составляющей –
![]() и, соответственно,
и, соответственно,
![]() ,
а изменение скорости по направлению –
нормальной компонентой –
,
а изменение скорости по направлению –
нормальной компонентой –
![]() .
.
Поэтому тангенциальное ускорение может быть записано как производная по времени от величины скорости (приближённо!):
![]() .
(11)
.
(11)
Найдем
величину
![]() .
.
Возьмём
наиболее простой случай криволинейного
движения — равномерное движение по
окружности, когда
![]() .
Рассмотрим перемещение точки за время
.
Рассмотрим перемещение точки за время
![]() ,
которому соответствует угол поворота
–
,
которому соответствует угол поворота
–
![]() по дуге
по дуге
![]() окружности
радиуса
окружности
радиуса
![]()
Треугольники
с углом
![]() оказываются
подобными (как равнобедренные с равными
углами при вершинах, напомним, что
оказываются
подобными (как равнобедренные с равными
углами при вершинах, напомним, что
![]() ).
).
Из
подобия треугольников следует
![]() ,
откуда находим выражение для нормального
ускорения:
,
откуда находим выражение для нормального
ускорения:
 .
(12)
.
(12)
Формула для полного ускорения при движении по окружности принимает вид:
.
 .
(13)
.
(13)
ПРИМЕЧАНИЕ. Соотношения (11), (12) и (13) можно распространить на всякое криволинейное движение (не только для движения по окружности!). Это связано с тем, что всякий участок криволинейной траектории в достаточно малой окрестности точки всегда можно приближенно заменить дугой окружности.
2.Угловая скорость и угловое ускорение.
Пройденный путь S , перемещение dr, скорость v, тангенциальное и нормальное ускорение at, и an, представляют собой линейные величины.
Для описания криволинейного движения наряду с ними можно пользоваться, так называемыми, угловыми величинами.
 Рассмотрим
важный и часто встречаемый случай
движения по окружности. В этом случае
наряду с длиной дуги окружности движение
можно характеризовать утлом поворота
Рассмотрим
важный и часто встречаемый случай
движения по окружности. В этом случае
наряду с длиной дуги окружности движение
можно характеризовать утлом поворота
![]() вокруг оси
вращения.
вокруг оси
вращения.
Определение 1.
Величину
![]() (1) называют
угловой скоростью. Угловая скорость
представляет собой вектор, направленный
по оси вращения тела.
(1) называют
угловой скоростью. Угловая скорость
представляет собой вектор, направленный
по оси вращения тела.
И если угол поворота φ является скаляром, то бесконечно малый поворот dφ — векторная величина, направление которой определяется по правилу правой руки, или буравчика, и связано с осью вращения. Если вращение является равномерным, то ω=const и имеет место поворот на равные углы вокруг оси вращения за равные времена.
Определение 2.
Время, за которое точка на окружности совершает полный оборот, т.е. поворачивается на угол 2π, называется периодом движения Т.
Определение 3.
Угловой
частотой называется величина, определяемая
выражением вида:
![]() .
(2)
.
(2)
Выражение
(2) можно представить как результат
интегрирования формулы (1). Действительно,
![]() .
При
.
При
![]() и
и
![]() получаем, что
получаем, что
 .
.
.
.
Определение 4.
Число оборотов в единицу времени есть величина, обратная периоду. Она называется частотой вращения
![]() .
(3)
.
(3)
Нетрудно получить связь между угловой и линейной скоростью точки.
При
движении по окружности элемент дуги
связан с бесконечно малым поворотом
соотношением
![]() .
Отсюда
.
Отсюда
![]() .
.
Подставив его в (1), находим, что модуль линейной скорости будет равен
![]() .
(4)
.
(4)
Формула (4) связывает величины угловой и линейной скоростей.
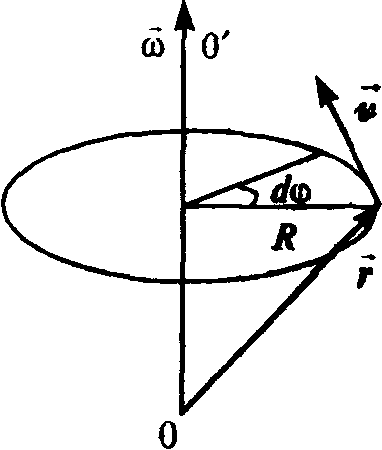
Более
общее соотношение очевидно из чертежа,
где вектор линейной скорости представляет
собой векторное произведение вектора
угловой скорости –
![]() и радиуса-вектора точки
и радиуса-вектора точки
![]() :
:
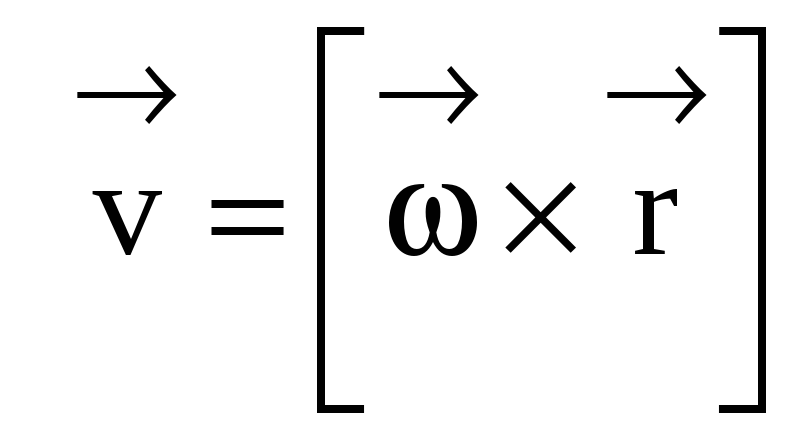 .
(5)
.
(5)
Справочный материал.
1.
Векторным произведением
векторов![]() и
и![]() называется
вектор
называется
вектор![]() ,
величина
которого равна площади параллелограмма,
построенного на векторах сомножителях,
а собственно векторы
,
величина
которого равна площади параллелограмма,
построенного на векторах сомножителях,
а собственно векторы
![]() ,
,![]() и
и![]() образуют
правую тройку векторов.
образуют
правую тройку векторов.
2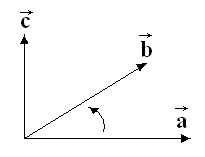 .
Векторы
{
.
Векторы
{
![]() ,
,![]() ,
,![]() }
образуют
правую тройку, если
кратчайший поворот от вектора
}
образуют
правую тройку, если
кратчайший поворот от вектора
![]() к
вектору
к
вектору
![]() ,
видимый из конечной точки вектора
,
видимый из конечной точки вектора
![]() ,
может быть произведен в направлении
«против часовой стрелки».
,
может быть произведен в направлении
«против часовой стрелки».
Определение 5.
Угловое
ускорение — это производная по времени
от вектора угловой скорости (соответственно
вторая производная по времени от угла
поворота)

3. Примеры расчёта кинематических характеристик автомобиля.
Пример №1.
Гоночный автомобиль движется на прямолинейном участке траектории так, что его ускорение растёт линейно и за первые 10с достигает значения 5 м/с2. Пренебрегая его собственными размерами и массой, определить в конце 10-ой секунды: 1) скорость автомобиля; 2) пройденный им путь.
Решение.
Поскольку ускорение растёт
линейно, то
![]() и неизвестный коэффициент пропорциональности
–
и неизвестный коэффициент пропорциональности
–
![]() м/с.
м/с.
По условию движение – прямолинейно, следовательно, скорость –
 м/с.
(1)
м/с.
(1)
Пройденный путь прямолинейного движения будет равен:
 м.
(2)
м.
(2)
Ответы:
1) по формуле (1) –
![]() м/с;
2) по формуле (2) –
м/с;
2) по формуле (2) –
![]() м.
м.
Пример №2.
Трековая модель автомобиля
вращается на привязи с частотой
![]() Гц.
После прекращения тяги, модель, сделав
Гц.
После прекращения тяги, модель, сделав
![]() оборотов,
остановилась. Пренебрегая собственными
размерами и массой модели автомобиля,
определить угловое её ускорение –
оборотов,
остановилась. Пренебрегая собственными
размерами и массой модели автомобиля,
определить угловое её ускорение –
![]() ,
если считать, что торможение является
равнозамедленным.
,
если считать, что торможение является
равнозамедленным.
Решение.
Поскольку торможение принимается равнозамедленным, то угол поворота –
 (1),
(1),
где
![]() угловая
частота вращения,
угловая
частота вращения,
![]() Гц
(2).
Гц
(2).
Конечное значение угла –
![]() рад
(3).
рад
(3).
Конечное значение угловой
частоты вращения –
![]() ,
следовательно из соотношения –
,
следовательно из соотношения –
![]()
![]() ,
где
,
где
![]() момент
остановки
момент
остановки![]() с (4).
с (4).
Подставляя в выражение (1)
соотношения (2), (3), (4), находим, что
![]() рад/c.
рад/c.
Примечание. Решение можно получить
в общем виде, полагая, что
![]() определены
общими выражениями –
(2÷4). Тогда
определены
общими выражениями –
(2÷4). Тогда
 рад/c.
рад/c.