

Оптимальное последовательное сглаживание координаты и скорости ее изменения
Более простым для технической реализации является алгоритм оптимального последовательного (итерационного) сглаживания координат и скорости их изменения.
Сущность этого метода состоит в том, что сглаженные значения (оценки) в очередном n-м обзоре определяются по предыдущим, полученным в (n – 1)-м обзоре, сглаженным значениям и результатам последнего n-го наблюдения.
Независимо от числа наблюдений при оценке используются два значения: предыдущая оценка и результат нового наблюдения. При этом требования к емкости ОЗУ и быстродействию вычислительного устройства существенно снижаются, а в оценке выходных данных учтена вся предшествующая информация о координатах цели (которая заключена в предыдущей оценке).
Синтез алгоритма оптимального последовательного сглаживания при гипотезе о равномерном прямолинейном движении цели дает следующие рекуррентные выражения для оценок.
1. Сглаженное значение координаты в n-м обзоре
r*n = r*nэ + αn∙(rn – r*nэ),
где rn – наблюдаемое в n-ом обзоре значение координаты; αn – коэффициент сглаживания координаты.
2. Сглаженное значение скорости изменения этой координаты

где βn – коэффициент сглаживания скорости.
3. Экстраполированное значение координаты на n-й обзор
r*nэ = r*n-1 + V*r(n-1)∙tобз.
В этом алгоритме сглаженное значение координаты определяется как линейная комбинация ее экстраполированного (по результатам предыдущих наблюдений) значения r*nэ и взвешенного с коэффициентом αn рассогласования между экстраполированным и наблюдаемым значениями координаты.
Сглаженное значение скорости определяется как линейная комбинация предыдущего сглаженного значения скорости и взятого с весом βn/tобз текущего отклонения наблюдаемого значения координаты от расчитанного по предыдущим данным экстраполированного значения координаты.
Коэффициенты сглаживания αn и βn зависят от номера обзора РЛС n с момента начала сопровождения цели
![]()
![]()
С увеличением n коэффициенты αn и βn уменьшаются и асимптотически приближаются к нулю. Это значит, что с увеличением времени наблюдения цели результаты последних наблюдений при сглаживании координаты учитываются все с меньшим весом, так что при достаточно больших n новые наблюдаемые значения координаты можно практически не учитывать. Это справедливо для гипотезы о равномерном прямолинейном движении цели при высокой точности измерения координат в РЛС.
При сопровождении реальных целей коэффициенты αn и βn не могут бесконечно уменьшаться с увеличением числа наблюдений n, т.к. возможны случайные отклонения цели от заданного маршрута полета. Поэтому коэффициенты сглаживания ограничивают снизу и для установившегося режима сопровождения выбирают постоянными. Их величина в установившемся режиме определяется ошибками измерения РЛС координат целей.
С выявлением маневра цели значения коэффициентов αn и βn увеличивают. При этом повышается «доверие» к вновь наблюдаемым значениям координаты rn по сравнению с экстраполированными. Сглаживание случайных ошибок в этом случае ухудшается, но уменьшаются динамические ошибки и система становится способной следить за маневрирующей целью.
Структурная схема вычислительного устройства, реализующего оптимальное последовательное сглаживание координаты и скорости, приведена на рис.5.28.
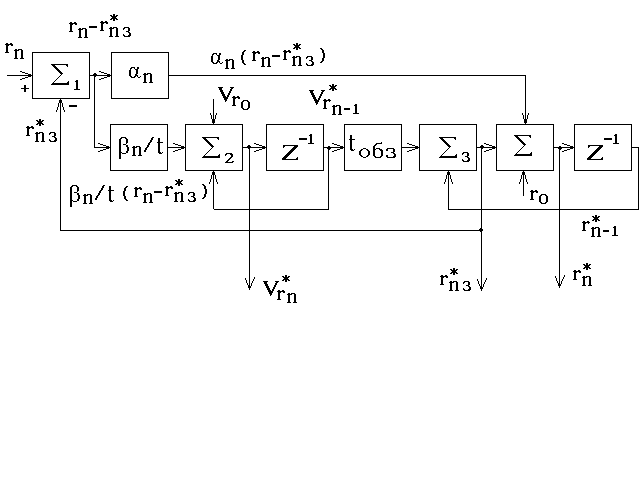
Рис.5.28. Структурная схема вычислительного устройства, реализующего оптимальное последовательное сглаживание координаты и скорости
Анализ рис.5.28 показывает, что устройство представляет собой сложную замкнутую цифровую систему с астатизмом второго порядка.
Поэтому при проектировании необходимо обеспечить ее устойчивость, требуемое время переходного процесса и т.д.