

5.6.3 Методы и техника радиолокационного распознавания
В процессе получения и обработки радиолокационной информации решаются следующие основные задачи: обнаружение целей, измерение параметров их движения, обнаружение и сопровождение траекторий целей, объединение информации от различных источников. Указанные задачи рассматривались в предыдущих подразделах. Одно из важнейших направлений современной радиолокации – создание методов получения наиболее полной информации, содержащейся в радиолокационных сигналах и помехах. Составной частью данного направления является радиолокационное распознавание.
Радиолокационное распознавание воздушного объекта (РЛР ВО) – это принятие решения о принадлежности ВО к тому или иному классу (типу) на основе полученных его радиолокационных характеристик.
Информация, получаемая по ВО в результате РЛР, является частным случаем некоординатной информации, в состав которой входят также признаки общего и индивидуального опознавания, дополнительная информация о своих ВО: барометрическая высота, индивидуальный номер и др.
Различные классы (типы) ВО составляют определенный алфавит. Выбор алфавита классов предопределяет как эффективность использования распознавания, так и трудности возникающие при его реализации, а значит и стоимость их преодоления.
Информация, используемая для распознавания, содержится в совокупности принимаемых радиолокационных сигналов. Для того чтобы распознать ВО, используют определенные измеренные признаки цели, которые сопоставляют в соответствии с алгоритмом распознавания с известными (аналогичными) признаками. Признаки РЛР разделяют по их физической природе на траекторные и сигнальные соответственно траекторное и сигнальное распознавание. При этом сигнальные признаки имеют отличия для активной и пассивной локации, однопозиционного и многопозиционного локатора.
Использование информации РЛР в радиолокационной системе позволяет существенно повысить ее эффективность. Именно поэтому к перспективным радиотехническим средствам предъявляется требование необходимости решения задачи сигнального и траекторного распознавания с требуемым качеством классов, а в перспективе и типов воздушных объектов.
Радиолокационное распознавание – относительно новое научно-техническое направление, находящееся на этапе становления. Технические устройства, его реализующие, имеются только в наиболее современных РТС и АСУ (причем эта аппаратура постоянно дорабатывается), а также рассматриваются к применению в перспективе. Поэтому инженерный состав РТВ должен кроме знания штатной аппаратуры распознавания иметь представление о методах РЛР, принципах построения технических устройств, реализующих эти методы, показателях эффективности РЛР и методах ее оценки.
5.6.3.1 Методы радиолокационного распознавания
Методы распознавания, основанные на применении узкополосных сигналов. Основными из них являются следующие.
1. Метод распознавания целей по интенсивности принимаемого сигнала.
2. Метод распознавания целей по модуляционным эффектам турбин и шумовой модуляции отраженного сигнала.
3. Метод распознавания целей по поляризационным отличиям отраженных сигналов.
4. Метод распознавания целей путем оценки их поперечных размеров по флюктуациям ЭПР.
Метод распознавания целей по интенсивности радиолокационных сигналов (по величине средней ЭОП, σ - признак). Анализ ЭОП различных аэродинамических целей показывает, что контраст в ЭОП самолетов и ракет, в совпадающих секторах наблюдения, составляет 15-25 дБ, а самолетов СА и самолетов ТА – от 0 до 10 дБ (см. табл.5.1).
Таблица 5.1
|
Тип воздушной цели |
сантиметровый диапазон |
дециметровый диапазон |
метровый диапазон |
|
СРЭМ |
0,02-0,2 |
0,03-0,8 |
0,1-2,5 |
|
АЛКМ |
0,1-0,4 |
0,1-1,8 |
1,0-4,8 |
|
B-1 |
10-50 |
14-100 |
35-100 |
|
B-111 |
8-11 |
7-11 |
8,5-15 |
|
B-52 |
60-120 |
55-120 |
27-55 |
|
F-15 |
6-20 |
7-20 |
10-30 |
Из анализа таблицы следует, что σ – признак целесообразно использовать только для распознавания двух классов целей – ракет от самолетов или ложных целей: σс/σр = 10 (контраст в ЭОП). Расчеты показывают, что для распознававания двух таких типов целей по σ – признаку с вероятностью правильного распознавания 0,85-0,9 достаточно 3-4 обращения к цели.
Сущность метода заключается в квантовании принятого сигнала в некотором элементе сканируемой поверхности, представлении его в виде матрицы и последующем сравнении с эталонами. Каждый элемент сканируемой поверхности состоит из отдельных участков (рис.5.35). Состояние «1» соответствует участкам, где находится элемент цели, а состояние «0» – участкам, где элемента цели нет. Совокупность единиц характеризует образ распознаваемой цели.
Алгоритм принятия решения по σ – признаку заключается в сравнении с порогом накопленной по обзорам суммы амплитуд (или мощностей) сигналов, нормированных к уровню шума и приведенных к фиксированным усилению и дальности с учетом направленности ДНА на цель и длительности зондирующих сигналов.
В случае превышения порога принимается решение в пользу класса «самолет», в противном случае – в пользу класса «ракета». Величину порога выбирают исходя из заданных вероятностей правильного принятия решения на основе априорных данных.
Недостатки метода связаны со значительным временем обработки, вследствие флюктуаций на разных ракурсах, и весьма слабой помехоустойчивостью.

Рис.5.35. Элементы отдельных участков сканируемой поверхности
Метод распознавания целей по модуляционным эффектам турбин и шумовой модуляции отраженного сигнала также достаточно прост при реализации. Исследования доплеровского изменения частот сигналов, отраженных воздушным объектом показывают, что спектры таких сигналов содержат доплеровские спектральные составляющие от вращающихся частей самолета (лопаток реактивных турбин или винтов) и непрерывный спектр, обусловленный движением самолета с радиальной скоростью Vr.
На рис.5.36 показаны спектры доплеровских частот, обусловленные отражениями от самолета (1) и коническим сканированием антенны (рис.5.36,а), при отражении от лопаток реактивного двигателя (1 – спектр от корпуса самолета, т.е. планерная составляющая) (рис.5.36,б) и спектр, вызванный пропеллерной модуляцией (1) и отражениями от корпуса самолета (2) (рис.5.36,в). Кроме того, имеет место расширение спектра вызванное случайными перемещениями цели, включающими рыскания по курсу, изменения углов крена и тангажа. «Турбинная» модуляция наблюдается на дальностях, не превышающих 0,66Rмакс (Rмакс – дальность обнаружения воздушного объекта).
По характеру модуляции можно производить следующие виды распознавания:
опредеделить количество двигателей воздушного объекта;
опредеделить изменение скорости воздушного объекта;
оценить наличие одного или двух воздушных объектов;
распознать разворот объекта на 180 градусов.
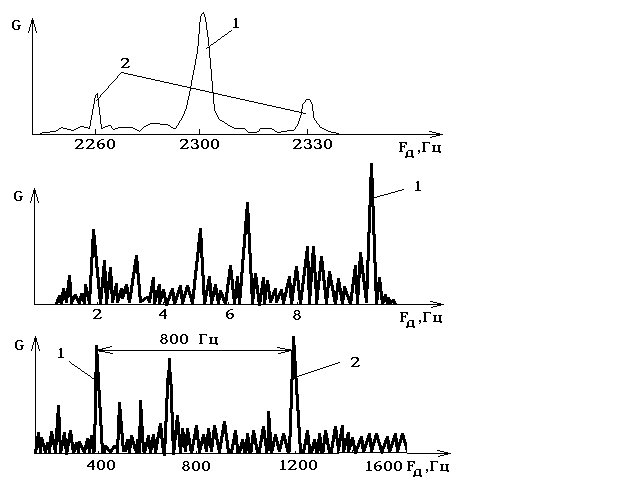
Рис.5.36. Спектры доплеровских частот, обусловленные отражением от самолета
Метод распознавания по модуляционным эффектам турбин весьма эффективен в короткой части сантиметрового диапазона волн при распознании строев, отдельных типов целей, определение моментов запуска ракет с носителей.
Реализация метода требует достаточно большого время контакта с целью (около 50-100 мс при Fп > 5 кГц). Поэтому этот метод может применяться в РЛС наведения и сопровождения. Недостатком метода является то, что двигатели самолетов могут работать на разных режимах и одинаковые двигатели могут стоять на разных типах самолетов. Это приводит к снижению достоверности распознавания.
Метод распознавания целей по поляризационным отличиям отраженных сигналов основан на анализе поляризационных структур принимаемых эхо-сигналов. При облучении объекта сложной формы сигналом с линейной поляризацией принимается два отраженных сигнала. Один из них имеет поляризацию, совпадающую с поляризацией зондирующего сигнала (т.е. коллинеарную поляризацию), а поляризация второго отраженного сигнала ортогональна поляризации зондирующего сигнала (перекрестная поляризация или кросс-модуляция). Для получения информации о классе цели необходимо предусмотреть в РЛС возможность для приема сигналов раздельно с двумя разными поляризациями (например, с вертикальной и горизонтальной) одновременно. Количественной характеристикой зависимости ЭОП цели от поляризации облучающей волны служит поляризационная матрица, которую иногда называют матрицей рассеяния. Принцип распознавания основан на том, чтобы исследовать члены матрицы в той последовательности, которая реализуется при наблюдении за объектом. Матрицу рассеяния получают следующим образом. Электрическое поле Eотр, отраженное от цели, представляется в виде:
EотрВ = SввEпадВ + SгвEпадГ; EотрГ = SвгEпадВ + SггEпадГ,
где
EотрВ
и EотрГ
– векторы, характеризующие электрическое
поле отраженных волн с вертикальной и
горизонтальной поляризациями; EпадГ
и EпадВ
– векторы падающих волн с горизонтальной
и вертикальной поляризациями;
![]() – коэффициент отражения при вертикальной
поляризации падающей волны и вертикальной
поляризации отраженной волны;
– коэффициент отражения при вертикальной
поляризации падающей волны и вертикальной
поляризации отраженной волны;
![]() – коэффициент отражения при горизонтальной
поляризации падающей волны и вертикальной
поляризации отраженной волны;
– коэффициент отражения при горизонтальной
поляризации падающей волны и вертикальной
поляризации отраженной волны;
![]() коэффициент отражения при вертикальной
поляризации падающей волны и горизонтальной
поляризации отраженной волны;
коэффициент отражения при вертикальной
поляризации падающей волны и горизонтальной
поляризации отраженной волны;
![]() коэффициент отражения при горизонтальной
поляризации падающей волны и горизонтальной
поляризации отраженной волны; φ, σ –
фаза и ЭОП
цели для соответствующих поляризаций.
коэффициент отражения при горизонтальной
поляризации падающей волны и горизонтальной
поляризации отраженной волны; φ, σ –
фаза и ЭОП
цели для соответствующих поляризаций.
В матричной форме электрическое поле можно записать в виде:

Матрица
вида:
 называется поляризационной матрицей.
называется поляризационной матрицей.
Излучение двух сигналов с разными поляризациями (вертикальной и горизонтальной) и последующий анализ отраженных сигналов на четырех поляризациях (двух коллинеарных и двух перекрестных) позволяет произвести анализ соотношения амплитуд сигналов с коллинеарной и перекрестной поляризациями. По результатам анализа отношения производится идентификация и распознавание классов воздушных объектов.
Недостатком данного метода являются трудности осуществления распознавания в реальном масштабе времени.
Метод распознавания целей путем оценки их поперечных размеров по флюктуациям ЭПР. Метод позволяет оценивать поперечные размеры целей по флюктуациям ЭПР, но для этого требуется большое время обработки сигналов и значительный объем памяти распознающих устройств.
Методы распознавания, основанные на применении многочастотных сигналов.
Хорошие показатели распознавания, незначительно уступающие по временным затратам на распознавание по радиолокационному портрету, имеют методы, основанные на использовании многочастотных сигналов (порядка 10 частот) с разносом между соседними частотами в 3-7 МГц.
Однако необходимость излучения большого количества близкорасположенных частот и сложность алгоритма обработки вносят существенные трудности при реализации многочастотного метода распознавания.
Основными из методов распознавания, основанных на применении многочастотных сигналов являются следующие.
1. Метод распознавания целей путем описания их формы структурным методом.
2. Метод, использующий для распознавания собственные резонансы целей при облучении их сигналами с несколькими частотами.
3. Методы, использующие импульсную характеристику и передаточную функцию распознавания объекта.
4. Метод, использующий зависимость интенсивности отраженных сигналов, а также собственные резонансы.
Первый метод применяют в тех случаях, когда имеется двумерное изображение самой формы цели. Суть метода состоит в том, что структура изображения распознаваемого объекта двумерной размерности описывается с помощью соответствующих грамматик. Этот метод основан на сходстве между структурой образов и синтаксисом языков.
Второй метод базируется на анализе ФЧХ распознаваемой цели. При этом половина длины волны РЛС выбирается соизмеримой с длиной цели. В этом случае наблюдается резонансное отражение ЭМВ, например самолетам присущи острые резонансные кривые (АЧХ) и быстро изменяющиеся ФЧХ. Разность фаз между падающей плоской волной и отраженной волной является той мерой, по которой определяется тип распознаваемой цели.
Физическая суть третьего метода заключается в следующем. При облучении цели сигналами с достаточно широким спектром она эквивалентна линейному электрическому фильтру с постоянными параметрами. Резонансные частоты фильтра определяются формой цели и ее геометрическими размерами, но не зависят от ракурса. Резонансные частоты проявляются в отклике фильтра, т.е. в отраженном сигнале от распознаваемой цели. При этом зондирующие сигналы РЛС, должны иметь такие несущие частоты, которые соответствуют резонансной области и перекрывают ее.
Четвертый метод базируется на фундаментальном физическом эффекте вторичного излучения объектов, поскольку интенсивность отражения от каждого токопроводящего объекта зависит от его формы и размеров, а также от длины волны РЛС. Если размер объекта составляет половину длины волны РЛС, то ЭПР максимальна. При изменении длины волны ЭПР носит колебательный характер, по которому и решается задача распознавания.
Многочастотные сигналы можно заменить и короткоимпульсными с достаточно широким спектром, удовлетворяющим названному выше условию. При реализации такого метода, сигналы, отраженные от целей, преобразуются в цифровую форму. Далее в цифровом процессоре вычисляются характеристики линейной системы (вычеты и полюсы), с помощью которой представляется радиолокационная цель. Переходный процесс в такой системе F(t) можно отобразить суммой экспоненциальных функций
![]()
где Ai, Рi – вычеты и полюсы линейной системы.
Полученные значения полюсов и сравниваются с эталонными значениями. Эксперименты с использованием моделей самолетов показали возможность решения задачи распознавания. Практического применения РЛС этот метод не получил из-за его сложности при реализации, дороговизны и больших временных затрат на обработку в ЭВМ.
Метод распознавания по «корреляционному» признаку. Метод основан на отличиях коэффициента корреляции амплитуд сигналов при многочастотном зондирующем сигнале. Корреляционный признак позволяет распознавать цели следующих типов:
самолеты СА и ТА, имеющие коэффициенты взаимной корреляции отраженных сигналов при разносе частот зондирующих сигналов Δf = 6МГц не более 0,6;
малоразмерные цели (ракета и ракета-ловушка), имеющие коэффициенты взаимной корреляции при Δf = 6 МГц не менее 0,9.
При условии достаточно большого времени наблюдения корреляционный признак может приниматься для распознавания классов: самолет СА (ρ ≤ 0,2) – самолет ТА (0,5 ≤ ρ ≤ 0,75).
Применение многочастотных сигналов позволяет «разменять» количество излучаемых частот на время принятия решения при сохранении заданной вероятности правильного распознавания.
В качестве алгоритма распознавания по корреляционному признаку, например, при двухчастотном сигнале используется обработка модуля относительной разности сигналов
ρ = |U1 – U2|/(U1 + U2),
где U1, U2 – амплитуды сигналов на частотах f1 и f2.
Если число обзоров М и используется 4-х (две пары 2-х частотного сигнала) частотный сигнал, то
![]()
где Ui j – амплитуда сигнала на частоте fi в j-ом обзоре.
Исследования показали, что за 5-6 независимых обзоров можно получить вероятность правильного распознавания целей типа самолет ТА – ракета-ловушка не ниже 0,5-0,8, а для случая распознавания целей: самолет СА – ракета-ловушка, такое же качество распознавания может быть достигнуто за 3-4 независимых обращения.
Корреляционный признак ρ позволяет распознавать цели класса: самолет ТА – самолет СА, однако для получения вероятности правильного распознавания не менее 0,8 потребуется более 12 независимых обращений к цели.
Алгоритм распознавания может использовать и совокупность признаков, например, интенсивность сигнала (σ-признак) и корреляционный признак (ρ-признак). Процедура распознавания осуществляется поэтапно. На первом этапе по σ-признаку распознается класс целей: ракета – не ракета (самолет, ложная цель). Если принято решение «ракета», то распознавание заканчивается, если принято решение «не ракета», то распознавание продолжается и для различения классов целей: самолет-ракета-ловушка используется ρ-признак. Для расчета используется информация, как из предыдущих, так и последующих обращений к цели.
Таким образом, комплексный алгоритм по сигнальным признакам достаточно прост при технической реализации и позволяет получить приемлемое качество распознавания за короткое время (3-4 обзора при 2-х частотном сигнале).
Методы распознавания, основанные на применении сверхширокополосных сигналов. Основными из них являются следующие.
Теоретические и экспериментальные исследования показали, что наиболее высокие характеристики распознавания основных классов аэродинамических целей: самолетов ТА, ракет, ложных целей обеспечивается при использовании сигнальных признаков, получаемых при зондировании сверхширокополосными сигналами с полосой 50-70 МГц и более. Полученное одномерное радиолокационное изображение цели позволяет обеспечить вероятность правильного распознавания P > 0.9 за 1-3 обращения к цели при отношении сигнал/шум на один радиолокационный портрет 18-23 дБ.
Практически все воздушные объекты для сверхширокополосного сигнала являются распределенными целями. Отраженное излучение от точек на поверхности воздушных объектов состоит из ряда дискретных сигналов, не перекрывающихся во времени. Расположение импульсов на временной оси и их количество устойчиво и соответствует геометрической форме облучаемого объекта. Это позволяет говорить о радиолокационной сигнатуре цели.
Имея априорную информацию о сигнатурах радиолокационных целей, можно осуществить их распознавание. Примерный вид радиолокационного портрета приведен на рис.5.38, где показаны огибающая и дискретные отсчеты РЛ портрета.

Рис.5.38. Огибающая и дискретные отсчеты радиолокационного портрета
Распознавание классов целей осуществляется сравнением радиолокационного портрета цели с эталонными портретами эталонных целей. Для этого рассчитываются коэффициенты корреляции полученного портрета с эталонными. По максимальному коэффициенту корреляции определяется класс воздушного объекта. Учитывая, что воздушные цели могут совершать маневры, угол наблюдения цели будет изменяться в широких пределах. Вид радиолокационного портрета существенно зависит от ракурса распознаваемой цели, т.к. при изменении ракурса как бы изменяются «наблюдаемые» геометрические размеры объекта, например, вдоль оси дальностей. Поэтому необходимо иметь набор эталонных портретов для различных углов наблюдения (ракурсов). Такая необходимость приводит к увеличению объема аппаратуры, повышению требований к производительности вычислительных средств. Кроме того, эталонные портреты должны соответствовать тем воздушным объектам, по которым будет решаться задача радиолокационного распознавания. Экспериментально в мирное время получить эталонные портреты на все классы ВЦ не представляется возможным. Теоретически полученные эталонные портреты требуют также экспериментальной проверки на соответствие их реальным.
Таким образом, все перечисленные особенности рассматриваемого метода затрудняют его практическое применение. Кроме того, метод имеет и другой существенный недостаток. Энергия отраженного сигнала от распределенных блестящих точек как бы «размазывается» по различным дискретам дальности в результате чего отношение сигнал/шум уменьшается и размеры зоны распознавания получаются меньше по сравнению с размерами зоны обнаружения РЛС. На вероятность распознавания оказывают влияние и внешние помехи. Наличие помех вызывает искажение радиолокационного портрета цели и при сопоставлении его с эталонным значением коэффициент корреляции уменьшается, а, следовательно, увеличивается вероятность неправильного решения. С целью ослабления влияния непреднамеренных помех (отражений от гидрометеообразований, подстилающей поверхности и др.) целесообразно в РЛС уменьшать угловые размеры диаграммы направленности антенны.