

3.3.7 Система группового и индивидуального управления органами регулирования суз
Система группового и индивидуального управления ОР СУЗ предназначена для контроля положения ОР СУЗ в активной зоне и перемещения ОР в активной зоне посредством воздействия импульсов постоянного тока на привод шагового электромагнита.
Система управления приводами ОР СУЗ РУ выполняет функции управляющей системы важной для безопасности и предназначена для организации перемещения органов регулирования при ручном и автоматическом управлении, а также при срабатывании сигналов АЗ, ПЗ и УПЗ.
В настоящее время (первая половина 2009 года) на энергоблоках ОП ЗАЭС установлены системы управления органами регулирования СУЗ нескольких типов:
- СГИУ ВНИИЭМ;
- ПТК СГИУ-И (СНПО «Импульс», г. Северодонецк);
- ПТК СГИУ-М (Śkoda, Чехия).
3.3.7.1 СГИУ ВНИИЭМ
Рассмотрим назначение, структурную схему и принцип работы комплекса технических средств СГИУ ВНИИЭМ.
Функции, выполняемые СГИУ:
- выбор любого из 61 ОР СУЗ с помощью блока индивидуального выбора ОР, расположенного на пульте БЩУ, путем выбора координат данного привода и формирования команды «больше» («меньше») для перемещения ОР с помощью ключа «Инд. Упр.»;
- перемещение вверх (вниз) любой из 10 групп ОР с помощью ключа «Гр. Упр.», путем выбора номера нужной группы на блоке выбора группы;
- перемещение ОР вверх в групповом режиме последовательно, начиная с 1 группы, от концевого нижнего выключателя до концевого верхнего выключателя или вниз, начиная с 10 группы, от концевого верхнего выключателя до концевого нижнего выключателя по заданному алгоритму от ключа «Гр. Упр.» с рабочей скоростью перемещения, равной 20±1,5 мм/с;
- перемещение вверх (вниз) регулирующей группы ОР СУЗ в автоматическом режиме от АРМ;
- введение запрета на движение ОР вверх при воздействии команды ПЗ-2 до снятия сигнала П3-2;
- поочередное перемещение вниз групп ОР СУЗ с рабочей скоростью до концевого нижнего выключателя, начиная с 10 группы, при воздействии команды ПЗ-1 и прекращение движения ОР при снятии команды ПЗ-1;
- сброс одной группы до концевого нижнего выключателя при прохождении сигнала УПЗ;
- сброс всех ОР до концевого нижнего выключателя при воздействии команды АЗ. Время падения ОР с полной высоты рабочего хода при обесточении электромагнитов в пределах 1,5÷4,0 с;
- групповое управление ОР СУЗ 5-ой группы от ключа «5 ГРУППА». Эта группа исключена из общего алгоритма группового управления. На нее команды ПЗ-1 и ПЗ-2 не воздействуют.
Непосредственно на ядерном реакторе расположены следующие устройства:
- приводы ШЭМ - шаговые электромагнитные, перемещающие ОР вверх или вниз с рабочей скоростью, пошагово – 20 мм/с;
- датчики УКП и ДПЛ - устройства контроля положения, формирующие сигналы положения ОР в пределах между концевыми нижними и верхними выключателями;
- блоки электроразводок.
Привод ШЭМ является исполнительным механизмом СУЗ реактора ВВЭР-1000 и обеспечивает вертикальное возвратно-поступательное перемещение или удержание ОР. Привод предназначен для выполнения следующих функций:
- перемещения органа регулирования СУЗ в режимах ручного и автоматического управления от ключей управления и по сигналам ПЗ-1 и УПЗ;
- фиксации его в крайних и промежуточных положениях;
- аварийного останова реактора путем сброса ОР при обесточении приводов в режиме АЗ.
Привод с помощью трех электромагнитов тянущего, запирающего и фиксирующего, обеспечивает возвратно-поступательное шаговое перемещение или удержание штанги с органом СУЗ. Режим перемещения штанги привода обеспечивается подачей импульсов тока, поступающий в определенной последовательности на катушки электромагнитов, в результате чего подвижная защелка запирающего электромагнита и работающий тянущий электромагнит перемещают штангу на один шаг, а защелка фиксирующего электромагнита удерживает ее между перемещениями.
Режим стоянки привода обеспечивается подачей тока на фиксирующий электромагнит, в результате чего фиксирующая защелка обеспечивает удержание штанги.
В режиме аварийной защиты все три электромагнита обесточиваются, защелки открываются, штанга с ОР под действием собственной массы перемещается в активную зону реактора.
Устройство контроля положения органов регулирования использует в качестве первичного преобразователя линейный датчик положения (ДПЛ). Датчик ДПЛ обеспечивает выдачу информации о положении ОР по всей длине рабочего хода штанги (3500 мм) через каждые 350 мм и информацию о достижении ОР конечных положений.
Датчик состоит из блока катушек, корпуса, чехла.
Блок катушек состоит из семи катушек, размещенных в герметичном защитном корпусе. Корпус обеспечивает защиту блока катушек от воздействия воды первого контура.
При установке датчика на привод ШЭМ, сам датчик устанавливается внутри блока перемещения и входит вовнутрь штанги. Когда ОР находится на механическом упоре, первая катушка датчика расположена в зоне шунта.
При извлечении ОР из активной зоны, шунт совместно со штангой перемещается вдоль корпуса датчика, перекрывая последовательно зоны катушек изменяя их индуктивность. Изменение индуктивности приводит к изменению напряжения на катушке на один вольт. При достижении шунтом седьмой катушки датчика, первая катушка начинает выходить из-под шунта. Когда ОР достигают верхнего концевого выключателя, под шунтом остается только седьмая катушка.
Преобразование напряжения с катушек датчика ДПЛ в индикацию положения ОР производится в панели ПКУ.
Указатель конечных положений (УКП) предназначен для контроля положения ОР СУЗ в крайних верхнем и нижнем положении. УКП состоит из: корпуса датчика, шунта, трубы с двумя упорами и комплекта пружин.
Когда на верхний и нижний упор датчика не воздействует штанга, шунт за счет пружин находится в зоне 4-ой катушки. Напряжение на 4 катушке максимальное. По индикации формируется сигнал «положение ОР между верхним концевым выключателем и нижним концевым выключателем».
При движении штанги привода вверх, штанга торцевой поверхностью нажимает на верхний упор датчика и шунт вместе со штангой делает ход вверх на 40 мм, сжимая пружины. При этом шунт перемещается в зону 5-ой катушки, изменяя ее индуктивность. На катушке изменяется напряжение с минимального до максимального, что соответствует положению штанги в зоне верхнего концевого выключателя.
При движении штанги привода вниз из зоны 4-ой катушки, шунт перемещается вниз, за счет воздействия штанги на нижний упор датчика, на 40 мм в зону 3-й катушки и останавливается за счет формирования сигнала от нижнего концевого выключателя. При обесточении привода ШЭМ орган регулирования опускается на механический упор, штанга перемещает шунт в зону 2-й катушки.
Структурная схема СГИУ ВНИИЭМ представлена на рисунке 14.
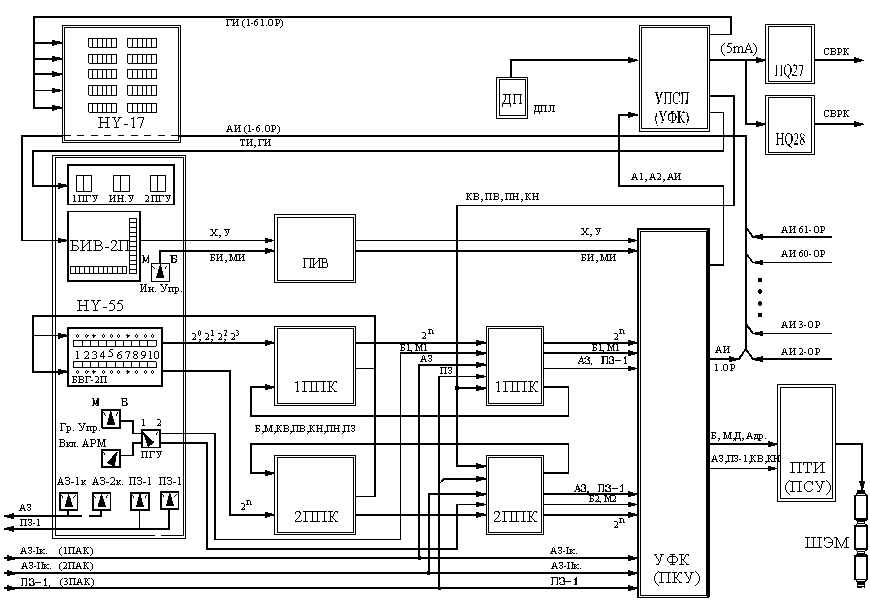
Рисунок 14 - Структурная схема СГИУ ВНИИЭМ
В обстройке реакторного отделения расположено следующее оборудование:
- панель промклеммников (ППК), предназначенная для коммутации входных и выходных сигналов с панелями системы СУЗ;
- панель группового управлениями (ПГУ), предназначенная для организации алгоритма перемещения групп органов регулирования при ручном управлении, по сигналам АРМ и по сигналам ПЗ-1;
- панель индивидуального выбора органов регулирования (ПИВ), предназначенная для фиксации координат органа регулирования, выбранного оператором, для перемещения органа регулирования в активной зоне от ключа с БЩУ;
- панель контроля и управления (ПКУ), предназначенная для преобразования сигнала от датчика положения в аналоговый сигнал индикации положения ОР СУЗ и формирования команд управления;
- панель силового управления приводом (ПСУ), предназначенная для управления шаговым электромагнитным приводом;
- аппаратура электропитания;
- блоки индикации, собранные в 10 рабочих групп, предназначенные для индикации на БЩУ положения органов регулирования по зонам;
- ключ подачи силового питания 220 В от секций CЕ и СF на панели питания оборудования СГИУ;
- стрелочные приборы, предназначенные для контроля силового питания 220 В от секций CE и CF на панели питания СГИУ.
3.3.7.2 СГИУ-М
Программно - технический комплекс группового и индивидуального управления ОР СУЗ СГИУ-М предназначен для:
- силового управления приводами ОР СУЗ;
- контроля положения ОР СУЗ по высоте активной зоны реактора;
- группового и индивидуального управления ОР СУЗ во всех режимах работы РУ;
- диагностики, отображения и архивирования данных о состоянии комплекса.
СГИУ-М состоит из следующих подсистем:
- подсистема силового управления приводами ШЭМ-М;
- подсистема контроля положения ОР СУЗ;
- подсистема группового и индивидуального управления ОР СУЗ;
- подсистема диагностики;
- подсистема приёма и обработки команд АЗ и УПЗ.
Структурная схема ПТК СГИУ–М приведена на рисунке 15.
Подсистема силового управления состоит из 61-го автономного канала управления, которые размещены в панелях 1÷31ПСУ. Панель силового управления ПСУ состоит из 2-х независимых идентичных каналов, каждый из которых предназначен для управления одним приводом ШЭМ-М ОР СУЗ.
Подсистема контроля положения состоит из 61-го автономного канала, которые размещены в 16-ти панелях ПКП. Каждая панель содержит 4 канала.
Для получения информации о положении ОР СУЗ в активной зоне РУ, на приводах ШЭМ-М установлены датчики положения ОР СУЗ. К подсистеме относится 61 индикатор положения в устройствах УГИП, расположенных на панелях БЩУ и РЩУ. Каждый канал контроля положения работает независимо от других каналов и выполняет все функции контроля и индикации положения одного ОР.
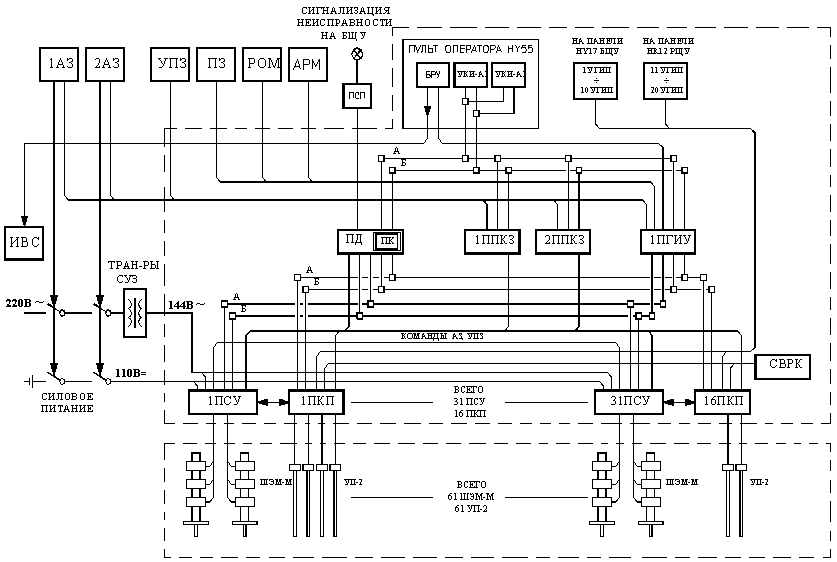
Рисунок 15 - Структурная схема СГИУ-М
Подсистема группового и индивидуального управления выполняет все функции комплекса, которые связаны с управлением перемещения ОР СУЗ за исключением сброса ОР по сигналам защит АЗ и УПЗ.
Подсистема группового и индивидуального управления состоит из следующих составных частей:
- трех идентичных каналов группового и индивидуального управления в панели ПГИУ;
- устройства коммуникации и индикации УКИ-А1 на пульте оператора HY55;
- устройства коммуникации и индикации УКИ-А2 на пульте оператора HY55;
- блока ручного управления БРУ на пульте оператора HY55;
- блока внешних подключений БП внутри пульта оператора HY55.
Каждый канал ПГИУ выполняет следующие функции:
- групповое управление перемещением групп ОР СУЗ по командам от АРМ и по сигналам ПЗ-1, а в режиме ручного управления от ключа «ГУ» оператором с БЩУ;
- управление любой одной группой ОР по командам оператора;
- управление ОР СУЗ 5-й группы от ключа «Управление 5-ой группой»;
- управление индивидуальным ОР СУЗ по командам оператора от ключа «ИУ»;
- введение запрета на перемещение ОР вверх при поступлении сигналов ПЗ-2;
- регистрацию падения ОР и выдачу сигнала о падении ОР в комплект ПЗ;
- подготовку данных о положении и направлении движения ОР для индикации при их групповом или индивидуальном управлении;
- формирование сигнала оповещения оператору при необходимости выравнивания ОР в группе и при нарушении жесткой последовательности групп;
- реализацию алгоритма «дотягивания» ОР;
- формирование сигналов «Неисправность ПГИУ», «Неисправность HY55 БЩУ» для панели диагностики;
- выдачу сигнала о неспособности выполнять функцию ПЗ-1;
Каждый канал принимает сигналы от панелей: ПКП, ПСУ, с пульта оператора. После их обработки формируются и посылаются на соответствующие устройства управляющие и информационные сигналы, обеспечивая тем самым надежную работу системы СГИУ по всем заданным критериям.
К подсистеме силового управления каналы ПГИУ подключены по двум дублированным магистралям последовательной передачи данных. Одна магистраль охватывает 31 канал силового управления - первый сектор, а вторая остальные 32 канала силового управления - второй сектор. Каждый из трех каналов ПГИУ выдает по магистрали команды на движение конкретного ОР СУЗ вверх или вниз. В канале ПСУ проводится мажоритарная обработка этих команд. Перемещение ОР в данном направлении проводится только при условии совпадения команд как минимум от двух из трех каналов ПГИУ.
К подсистеме контроля положения каналы ПГИУ подключены по двум дублированным магистралям последовательной передачи данных. Каждый из трех каналов ПГИУ выдает на магистраль команды на движение конкретного ОР СУЗ вверх или вниз. В канале ПКП проводится мажоритарная обработка этих команд.
Команды от ключей управления передаются в ПГИУ в виде дискретных сигналов напряжением 24 В постоянного тока по трем каналам, причем сигналы для передачи по одному каналу снимаются с контактов одного этажа ключа (переключателя). В каналах ПГИУ программным путем проводится мажоритарная обработка поступивших сигналов. Кроме того, при несовпадении всех трех сигналов от одного ключа формируется сигнал «Неисправность».
Таким же образом подаются в каналы ПГИУ команды по трем каналам от АРМ, но с той разницей, что при несовпадении команд во всех каналах сигнал неисправности не формируется.
Сигналы ПЗ-1 и ПЗ-2 подаются на три канала ПГИУ.
Информация о группе, выбранной для группового управления, о координатах ОР, выбранного для индивидуального управления и остальная информация с пульта оператора поступает на ПГИУ по линии коммуникации.
Устройство коммуникации и индикации УКИ-А1 выполняет следующие функции:
- индикацию номера, положения и направления движения главной группы ОР, выбранной для автоматического управления;
- индикацию номера, положения и направления движения группы ОР, выбранной для ручного управления;
- индикацию координат, положения и направления движения ОР, выбранного для индивидуального управления;
- выбор координат ОР для индивидуального управления;
- съем ПЗ-2;
- съем сигнала оповещения оператору.
Панель блока индивидуального выбора выполнена в виде картограммы реактора. Направо от картограммы находятся кнопки выбора координаты Х, спереди кнопка выбора четного, а сзади нечетного значения координаты Y.
Блок индикации предназначен для отображения информации о группе управляемых ОР и информации об индивидуально управляемом ОР.
Устройство УКИ-А2 предоставляет оператору дополнительную информацию:
- о точном положении ОР СУЗ в виде гистограмм;
- о размещении ОР СУЗ в зоне реактора;
- отображает выбранные для ручного управления ОР СУЗ.
Блок ручного управления служит в качестве устройства управления ПГИУ. Блок позволяет управлять органами регулирования, как по группам, так и индивидуально. БРУ расположен на пульте оператора HY-55 на БЩУ.
Блок внешних подключений (БП) находится внутри пульта оператора и содержит ряды клемм для ввода питающего напряжения, подключения кабелей от ПГИУ и некоторых других частей, разъемы для подключения линий дублированной магистрали коммуникации УКИ и модуля питания, предназначенного для диодной развязки двух вводов напряжения питания для БРУ.
Подсистема диагностики состоит из панели диагностики (ПД), которая обеспечивает:
- регистрацию и сигнализацию неисправностей в системе;
- сбор, обработку и отображение замеряемых данных, команд и сигналов управления;
- хранение выбранных данных и оповещений о неисправностях;
- информационную поддержку испытаний приводов ОР СУЗ реактора.
Основной составной частью панели являются персональный компьютер и монитор. Компьютер проводит обработку данных, отображение их на экране монитора и регистрацию выбранных данных на жестком диске.
Подсистема приема и обработки команд АЗ и УПЗ обеспечивает выполнение следующих функций:
- прием сигналов АЗ по трем каналам от двух комплектов аварийной защиты;
- обработку сигналов АЗ («2 из 3»), выдачу на ПСУ команд на сброс ОР СУЗ;
- прием сигналов УПЗ по трем каналам от комплекта УПЗ;
- выбор группы ОР СУЗ для УПЗ путем неоперативной установки перемычек;
- обработка сигналов УПЗ по принципу «2 из 3», выдача на ПСУ команд на обесточение электромагнитов приводов ОР СУЗ группы, выбранной для УПЗ;
- контроль и тестирование подсистем с передачей информации в панель диагностики.
Подсистема состоит из двух панелей ППКЗ, каждая из которых содержит идентичное трехканальное устройство приема и обработки команд защит.
Мажоритарная обработка сигналов АЗ и УПЗ введена с целью избежать падение группы ОР, выбранной для УПЗ в случае, когда на вход одного канала ППКЗ поступает ложный сигнал АЗ, а на вход другого канала ППКЗ поступает сигнал УПЗ, вызванные неисправностью указанных систем.