

3.1.2. Силовой расчет исходного механизма
Силовой расчет кривошипа позволяет определить уравновешивающий момент.
Для
расчета перенесем с разметки начальное
звено, отбросим стойку и заменим ее
неизвестной реакцией R01.
Нагрузим кривошип силами тяжести и
реакциями связей (рис.9). 
Рис. 9 Схема нагружения исходного механизма
Уравновешивающий момент Мур определим из уравнения равновесия кривошипа в форме моментов относительно точки О1.
 (3.2.1)
(3.2.1)
Из уравнения [3.2.1] выразим момент Мур и найдем его численное значение:
 ,
,
где

hG1=19,65 мм; hR21=32,61 мм. Следовательно

Для нахождения неизвестной реакции R01 составим уравнение всех сил, действующих на звено, и решим его методом планов:


Рис. 10 План сил исходного механизма
Для
определения численного значения
неизвестной реакции
 необходимо измерить отрезок, которым
обозначается данная реакция на плане
сил и умножить ее на масштабный коэффициент
необходимо измерить отрезок, которым
обозначается данная реакция на плане
сил и умножить ее на масштабный коэффициент .
.

Для седьмого положения сила реакции R01 и момент уравновешивания определяется аналогично.


Раздел 4. Неполное статическое уравновешивание кривошипно-ползунного механизма
При работе механизма его стойка оказывает переменное силовое воздействие на фундамент (или опору), которое вызывает нежелательные колебания последнего. Неполное статическое уравновешивание кривошипно-ползунного механизма будем искать для первого положения.
Устранение переменного воздействия на фундамент со стороны стойки называют уравновешиваем. Механизм называют уравновешенным, если главный вектор и главный момент сил давления стойки на фундамент остаются постоянными при заданном движении начальных звеньев.
Неполное статическое уравновешивание кривошипно-ползунного
механизма, при котором устанавливается один противовес mD, устраняющий вертикальное динамическое воздействие. Горизонтально динамическое воздействие остается неуравновешенным.
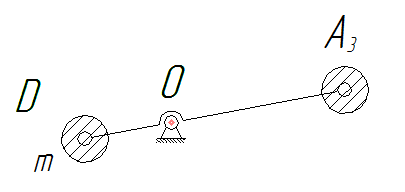
Рис. 11 Схема частичного уравновешивания
 (4.1)
(4.1)
Из формулы [4.1] выразим массу mD:
 ,
,
где mA1=14,4 кг; mА2=13,4 кг.

ЗАКЛЮЧЕНИЕ
В данном курсовом проекте были решены задачи кинематического и кинетостатического анализа механизма. В ходе выполнения проекта были получены достигнуты следующие цели:
выполнен полный кинематический расчет механизма;
определены значения скоростей, ускорений и перемещений звеньев и точек механизма;
найдены положения рабочего хода механизма;
определены силы и реакции, действующие на механизм.
Результаты курсовой работы соответствуют поставленным задачам. Все цели, заданные на проект были достигнуты и полностью соответствуют указанным допускам и допущениям.
Следует отметить, что при выполнении проекта были соблюдены все правила и выдержаны все требования с точки зрения поставленных задач.
На основании всего этого можно сделать вывод, что проект является законченным полноценным расчетом.
Список используемой литературы
1. Н.Н. Федоров. Теория механизмов и машин. Учебное пособие. Омск, изд-во ОмГТУ, 2008.
2. Н.Н. Федоров. Кинетостатика плоских механизмов и динамика машин. Учебное пособие. Омск, изд-во ОмГТУ, 2001.
3. И.Л. Рязанцева. Теория механизмов и машин в вопросах и ответах. Учебное пособие. Омск, изд-во ОмГТУ,2013.
4. Артоболевский И. И. Теория механизмов и машин. Учебник для вузов - М.: Наука, 1988.
5. Н.Н. Федоров. Проектирование и кинематика плоских механизмов. Учебное пособие. Омск, изд-во ОмГТУ, 2000.