

2
A 
1
90




 (м
(м  c)
c) мм
мм
vC, vS 5 vS 4
в
vA2A1
ω 1 90
90
aA2kA1
План механизма
м  мм
мм
B
S4
 S5 5
S5 5
a3
vA2A1
aC = aS5 |
c |
План ускорений |
|
(м c2) мм |
|
|
s5 |
aS
aCBτ |
a3 |
a n 

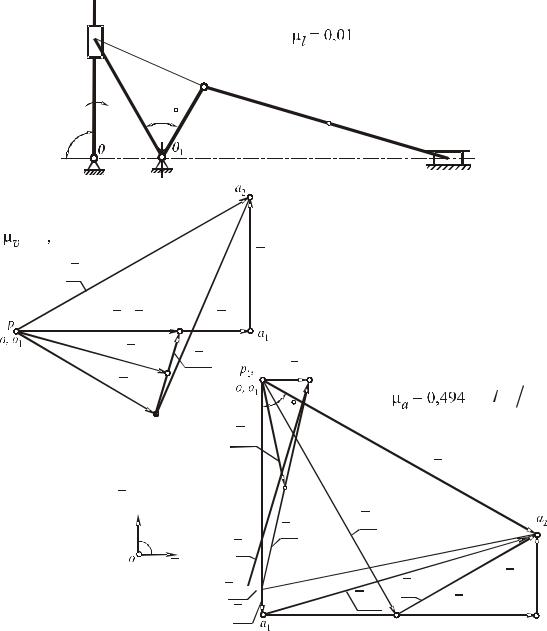
Рис. 39
Положение центров масс (точки S4 и S5) звеньев определяют по правилу подобия. Отрезки ( ps4 ) и ( ps5 ) плана – vS4 и vS5 .
План ускорений
Ускорение точек А1 и А2 звеньев 1 и 2:
aA1 = aA2 = w 12 × lOA = 102×0,346 = 34,6 м/с2.
77

Масштабный коэффициент ускорений μ a = |
aA |
= |
34,6 м с2 |
|
м с2 |
. |
|
1 |
70 мм |
= 0,494 |
мм |
||||
p1a1 |
|||||||
|
|
|
|
Далее составляют два векторных уравнения для определения ускорения точки А3
aA |
= aA |
= |
a |
A |
+ |
a r |
|
+ |
a k |
|
, где a k |
|
= |
2 v |
A A |
×w1 = 2×(41×0,049)×10 = 40,18 м/с2, |
||||||
3 |
2 |
|
|
|
A A |
|
A A |
A A |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1 |
|
2 |
1 |
|
2 |
1 |
2 |
1 |
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
+ aAτ 3O1 , где aAn |
|
|
v2A O |
|
|
(81,5× 0,049)2 |
|
м/с2. |
|||||
|
aA3 |
= |
aA3O1 |
+ aA3O1 |
O |
= |
|
|
3 1 |
= |
|
= 39,87 |
||||||||||
|
|
|
|
0,4 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
1 |
|
|
lAO |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
Из полюса параллельно звену 1 к центру его вращения откладывают отрезок (p1a1 ), изображающий на плане a A1 . К точке а1 плана пристраивают вектор aAk2 A1 ^ ОА, а направление его определяют поворотом вектора на 90° в сторону действия w1 (см. рис. 39). К полюсу параллельно звену АО1 пристраивают вектор aAn3O1 , направляя его к центру вращения звена w3.
Далее через конец вектора aAn3O1 проводят л. д. aAτ 3O1 ^ АО1, а через конец вектора aAk2 A1 – л. д. aAr2 A1 ïï АО. Линии действия взаимно пересекаются в точке а3. Отрезок ( p1a3 ) плана – aA3 . Точку в на плане определяют из подобия и сходственного расположения Dо1а3в, построенного на отрезке ( p1a3 ) плана и
DО1АВ на плане механизма. Отрезок ( |
|
) |
плана – aB . Чтобы найти ускорение |
||||
p1в |
|||||||
точки С необходимо записать векторное уравнение |
|
||||||
n |
vCB2 |
|
(27 × 0,049)2 |
|
|||
aC = aB + aCBn + aCBτ , где aCB = |
|
|
= |
|
= 2,33 м/с2. |
||
lCB |
0,75 |
||||||
|
|
|
|
||||
и знать л. д. aC5 . На плане к точке в пристраивают вектор aCBn , параллельно звену СВ и направив его к точке В – центру относительного вращения звена 4. Через конец вектора перпендикулярно к нему проводят л. д. и продолжают до пересечения с л. д. aC5 , проведенной через полюс параллельно линии О1С. Пересечение этих линий действия определит положение точки с на плане. Отрезок плана – aC . Ускорения точек точки S4 и S5 определяют из условия подобия. Отрезки (p1s4 ) и (p1s5 ) плана – aS4
78
Задача №30. Шестизвенный кулисный механизм (Рис. 40)
Исходные данные: lOA = 0,15 м; lОВ = lOС = 0,45 м; lСD = 0,515 м; ω1 = 10 с–1. Построив планы скоростей и ускорений, определить численные значения
скорости и ускорения точки С звена 5.
|
|
План механизма |
|
|
|
|
|
|||||
|
|
Построен |
с |
учетом |
масштабного |
коэффициента |
длины |
m l |
||||
|
|
lOA |
0,15 м |
= 0,01 |
м |
и заданным параметрам кинематической схемы. Длина |
||||||
= |
|
|
|
= |
|
|
||||||
|
|
|
15 мм |
мм |
||||||||
OA |
||||||||||||
звена АВ для данного положения механизма определится из ОАВ (по условию решения косоугольного треугольника) lAВ = 0,397 м;.
План скоростей |
|
Скорости точки А звена 1: vA = w 1 × lOA = 10 × 0,15 = 1,5 |
м . |
|
c |
Скорость точки В звена 2 определяют из векторных уравнений vB2 = vA + vB2 A и vB2 = vB3 + vB2 B3 , vB3 = 0.
Произвольно выбранный масштабный коэффициент скорости
μ v = |
vA |
= 1,5 |
м c |
= 0,02 |
м c . |
|
ра |
мм |
|||||
|
75 |
|
мм |
79

3
B

ω 2
D
A 
План скоростей



 (м
(м  c)
c) мм
мм
|
|
в2 |
d |
|
|
|
|
|
|
a |
a k |
|
|
|
|
|
|
|
|
|
|
|
|
|
B B |
2 |
|
|
|
|
a r |
3 |
|
|
|
|
v |
a |
|
|
|
|
|
B3B2 |
B2 |
|
|
|
|
|
D |
|
|
|
|
|
|
|
в2 |
|
|
|
vB B |
3 |
|
|
|
|
|
2 |
|
vCD |
|
|
|
|
|
|
|
|
|
|
|
|
vC |
|
|
|
90 |
|
|
c |
|
B2B3 |
|||
|
|
|
||||
Рис. 40
План механизма
м  мм
мм
5
План ускорений
|
|
(м c2) мм |
|
aC |
|
c |
|
aD |
τ |
aCD |
|
|
aCD |
||
|
|
a n |
|
|
|
CD |
|
|
|
d |
|
τ |
aB A |
aD |
|
2 |
|||
|
|
a
aB2A
Из полюса плана, перпендикулярно звену ОА в сторону действия w1, откладывают отрезок ( pa ) = 75 мм. Через точку а плана проводят л. д. vB2 A ^АВ, а через полюс – л. д. vB2 B3 ïï АВ. В пересечении линий действия – точка в2. Отрезок ( pв2 ) плана – vB2 B3 . Скорость точки D определяют из условия подобия и сходственного расположения Dав2d, построенного на отрезке (aв2 ) плана скоростей и DАВD на схеме механизма. Отрезок (pd ) плана – vD .
Для определения скорости точки С записывают векторное уравнение vC = vD + vCD и имеют ввиду, что известна л. д. vC5 ползуна. На плане через точ-
80