

5.2. Теодолитная съёмка
Контурная или ситуационная съёмка, при которой положение снимаемых объектов определяется относительно сторон теодолитного хода называется теодолитной съёмкой . Каждая сторона теодолитного хода образует своеобразную систему координат – прямоугольную, полярную или биполярную. Началом отсчёта в такой системе должна быть младшая вершина теодолитного хода. При съёмке ситуации возможно использование одного из следующих способов [2, 3, 5, 7]:
перпендикуляров,
линейных засечек,
угловых засечек,
полярный способ,
способ створов,
способ обхода.
Горизонтальная съёмка обязательно должна сопровождаться абрисами.
Абрис – это схематичный чертёж местных предметов, выполненный в полевых условиях, с указанием размеров в соответствии со способами съёмки ситуации.
Способ перпендикуляров. Положение снимаемого пункта М относительно стороны теодолитного хода А-В определяется двумя взаимно перпендикулярными отрезками – абсциссой х и ординатой у (рис. 5.1,а). При этом следует помнить, что при глазомерном построении прямого угла длина ординаты не должна превышать 4… 6 м в зависимости от масштаба съёмки. Съёмку должны выполнять два человека, один из которых определяет створ линии хода, а другой измеряет абсциссу и ординату.
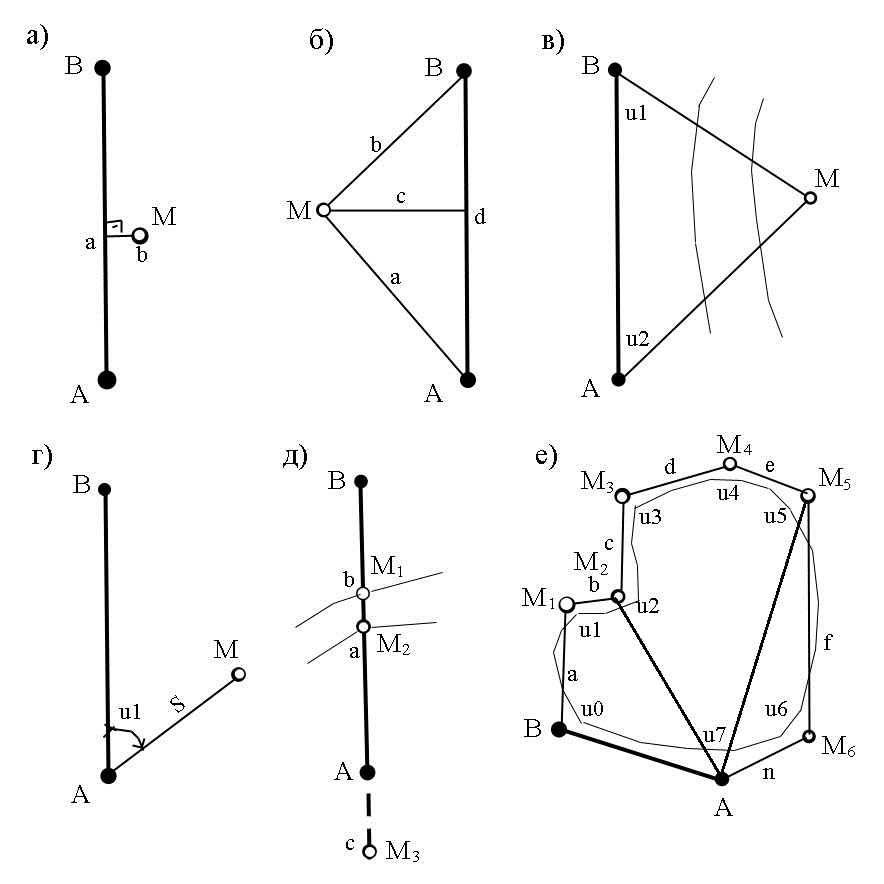
Рис. 5.1. Способы съёмки ситуации
Способ линейных засечек. Положение снимаемого пункта М относительно стороны теодолитного хода А-B определяется двумя отрезками a и b (рис. 5.1,б). По существу, это секция трилатерации. Для того чтобы повысить устойчивость системы, снять ограничения и исключить грубые ошибки рекомендуется измерить ещё два отрезка c и d. Для измерений можно использовать лазерный прибор как в отражательном, так и в безотражательном режимах.
Способ угловых засечек. Положение снимаемого пункта М относительно стороны теодолитного хода А –В определяется двумя горизонтальными углами u1 и u2 (рис. 5.1,в). Углы измеряются теодолитом полным приёмом. Значения углов должны быть не более 150° и не менее 30°. Удаление снимаемого пункта от стороны хода должно быть не более её длины.
Способ полярных координат. Положение снимаемого пункта М относительно стороны теодолитного хода А –B определяется полярными координатами – горизонтальным углом u1 и расстоянием S (рис. 5.1,г). Расстояние измеряется, как правило, нитяным дальномером, за исключение углов капитальных зданий, когда используется лазерный прибор.
Способ створов. Положение снимаемых пунктов М относительно створа вершин А и B теодолитного хода (или продолженного створа) определяется отрезками линий a, b, c, отсчитываемых от пункта А (рис. 5.1,д).
Способ обхода. Применяется при съёмке контуров со сложными очертаниями (например, береговой линии водоёма). По существу, это теодолитный ход, в котором нет уравнивания, а горизонтальные углы при вершинах измерены одним полуприёмом. Для обеспечения контроля следует предусматривать диагональные линии, измеряемые лазерным прибором (рис. 5.1,е).
5.3. Тахеометрическая съёмка
Греческое слово «tachys» означает быстрый, поэтому данный вид съёмки можно определить как быструю съёмку, при которой положение снимаемого пункта определяется одним наведением зрительной трубы на вертикально установленную рейку [3, 9]. Принцип определения положения – это пространственная полярная система координат. Полюсом является тахеометрическая станция, на которой устанавливается теодолит. Высотное положение станции определяется геометрическим нивелированием, а плановое так же, как пунктов теодолитного хода. На точку, подлежащую съёмке, устанавливается шашечная рейка, которая называется реечной точкой. Для определения планового положения снимаемой точки используется полярный способ горизонтальной съёмки, а для определения высотного её положения - тригонометрическое нивелирование.
Целью тахеометрической съёмки является получение топографического плана местности. На топографическом плане изображаются ситуация и рельеф.
 Быстрота
съёмки имеет и свой недостаток. Рельеф
как сложный объект съёмки должен быть
в полевых условиях (в течение короткого
времени) правильно осознан и адекватно
отображен в полевых записях. Основной
полевой документ тахеометрической
съёмки – кроки (рис. 5.2), иногда по аналогии
с теодолитной съёмкой его называют
абрис. Это эскиз горизонтальной проекции
снимаемого участка, на котором показаны
пункты съёмочного обоснования,
тахеометрическая станция, элементы
ситуации, реечные точки, направления
скатов местности, характерные точки и
структурные линии рельефа. Вторым важным
документом будет журнал тахеометрической
съёмки (табл. 5.1). Заполнение журнала
следует вести по стандартной форме,
четко, без исправления записей и, как
правило, карандашом. Для удобства ведения
записи журнал и кроки должны иметь
жесткую обложку.
Быстрота
съёмки имеет и свой недостаток. Рельеф
как сложный объект съёмки должен быть
в полевых условиях (в течение короткого
времени) правильно осознан и адекватно
отображен в полевых записях. Основной
полевой документ тахеометрической
съёмки – кроки (рис. 5.2), иногда по аналогии
с теодолитной съёмкой его называют
абрис. Это эскиз горизонтальной проекции
снимаемого участка, на котором показаны
пункты съёмочного обоснования,
тахеометрическая станция, элементы
ситуации, реечные точки, направления
скатов местности, характерные точки и
структурные линии рельефа. Вторым важным
документом будет журнал тахеометрической
съёмки (табл. 5.1). Заполнение журнала
следует вести по стандартной форме,
четко, без исправления записей и, как
правило, карандашом. Для удобства ведения
записи журнал и кроки должны иметь
жесткую обложку.
На каждой тахеометрической станции съёмочные операции выполняются в следующей последовательности:
Производится точное центрирование прибора над вершиной измеряемого угла и нивелирование горизонтального круга.
Ориентирование горизонтального круга осуществляется путём совмещения «0» лимба с «0» алидады и с некоторым направлением. Ориентирование круга сопровождается записью в журнале.
Измеряется и записывается в журнале высота прибора.
Определяется место нуля прибора и записывается в журнал.
Составляются кроки, на которых изображается всё, что необходимо, за исключением реечных точек.
Наблюдатель планирует и сообщает своему помощнику с рейкой места установки рейки, то есть реечные точки или, иначе, пикеты. Условия выбора реечных точек приведены в таблице 5.2.
Производится последовательная отработка всех реечных точек. Для каждой реечной точки наблюдатель производит наведение сетки нитей зрительной трубы на некоторую высоту «w» по рейке и записывает в журнале расстояние до реечной точки по дальномеру и отсчёты по горизонтальному и вертикальному кругу прибора. Реечник имеет возможность переходить на следующую точку после измерения расстояния, то есть в то время, когда производятся отсчёты по кругам прибора. Параллельно с записью в журнале номера точек отмечаются на кроки.
По завершению работы на станции производится контроль ориентирования горизонтального круга. Допускаемое отклонение составляет 1,5 минуты.
Использовать при работе на тахеометрической станции лазерный прибор не эффективно. Производительность труда с нитяным дальномером намного выше, точность его достаточная.
Однако при съемке контуров нельзя обойтись без внешних обмеров зданий и сооружений. Здесь лазерная рулетка будет незаменимым инструментом.
Как уже отмечалось, тахеометрическая съёмка не очень наглядная, поэтому глобальные контрольные промеры линий длиной 100…200 м могут упростить восприятие структуры ситуации и исключить грубые ошибки.
Таблица 5.1
ЖУРНАЛ
тахеометрической съёмки
станция _т2_; Нст = 104,75 м, i =1,55_м, МО= 0°01ʹ
|
|
Рас-стоян. D, м
|
ГК
|
ВК
|
|
w
|
d tg или 0,5D sin 2v |
H , м
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
т3 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 т3 |
12,8 29,9 21,6 11,2 34,1 31,6 40,5 20,0 49,2 40,2 30,8 48,6 36,8 47,0 13,4 24,3 50,4 38,1 |
0000 33550
15 48
97 30 0000 |
-443,5 -4 17 -4 19 -5 30 -4 03,5 -3 36,5 -3 20 -3 45 -2 37 -2 27 -2 28 -1 42,5 -1 52,5 -1 07,5 -2 25 -1 22,5 -0 31 -0 37 |
______ -4°44,5ʹ
______
______
______
|
____ 1,06
_____
_____
____
|
_______ -1,05
_______
_______
_____ |
_______ 104,19
_______
_______
_______ |
Таблица 5.2
Допускаемые расстояния при тахеометрической съёмке
|
Масштабы
|
Высота сечения рельефа
|
Не долее между пикетами, м
|
Не более до пикета, м
| |
|
рельеф |
ситуация | |||
|
1: 1000 |
0,5 1,0 |
30 40 |
150 200 |
80 80 |
|
1: 500 |
0,5 1,0 |
15 20 |
100 150 |
60 60 |
По окончании работы на каждой станции обязательно производится контроль ориентирования. Погрешность замыкания горизонта не должна быть более 1 минуты.