

Метод минимального риска.
Метод минимального риска используется для определения граничного значения определяющего параметра для принятия решения о состоянии объекта, исходя из условия минимума средних затрат.
Пусть состояние некоторого объекта определяется значением некоторого параметра х. необходимо выбрать такое значение этого параметра х0, чтобы:
 (2.16)
(2.16)
Условимся считать, что D1 – исправное состояние, а D2 – неисправное.
Исправное состояние характеризуется плотностью распределения параметра х, f(x/D1) а неисправное – f(x/D2) (рис 2.8). Кривые f(x/D1) и f(x/D2) пересекаются и поэтому невозможно выбрать х0 так, чтобы правило (2.16) не давало бы ошибочных решений.
Возникающие при принятии решения ошибки подразделяют на ошибки первого и второго рода.
Ошибка первого рода – принятие решения о неисправности (наличии дефекта) объекта, когда в действительности объект находится в исправном состоянии.
Ошибка второго рода – принятие решения об исправном состоянии объекта, когда в действительности объект находится в неисправном состоянии (объект содержит дефект).
Вероятность ошибки первого рода равна произведению вероятности двух событий:
вероятности того, что объект находится в исправном состоянии;
вероятности того, что значение определяющего параметра х превысит граничное значение х0.
Выражение для определения вероятности ошибки первого рода имеет вид:
 ,
(2.17)
,
(2.17)
где p(D1) – априорная вероятность нахождения объекта в исправном состоянии (считается известной на основании предварительных статистических данных).
Аналогично определяется вероятность ошибки второго рода:
 .
(2.18)
.
(2.18)
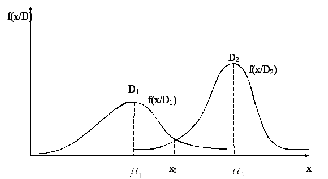
Рис. 2.8. Плотности вероятностей состояний объекта диагностирования
Элементы систем сбора информации: унифицирующие измерительные преобразователи.
Для согласования первичного преобразователя с устройствами системы сбора информации его выходной сигнал должен быть унифицирован, т.е. отвечать некоторым требованиям по уровню, мощности, виду носителя информации и т.д., которые определяются соответствующими ГОСТ.
Для преобразования выходных сигналов первичных преобразователей в унифицированные применяется ряд нормирующих преобразователей. На вход нормирующих преобразователей могут подаваться естественные сигналы первичных преобразователей различных физических величин, а на выходе формируются соответствующие унифицированные сигналы.
Группа средств, обеспечивающих унификацию сигнала между его источником или выходом первичного преобразователя и входом вторичного устройства, относится к классу унифицирующих измерительных преобразователей (УИП).
Различают следующие типы УИП:
индивидуальные;
групповые;
многоканальные.
Индивидуальные УИП(рис. 3.36а)) обслуживают один ПП и включаются между ПП и коммутатором или последующим измерительным преобразователем. Индивидуальные УИП размещаются вместе с ПП непосредственно на объекте исследования.
Они используются для унификации сигналов при сравнительно небольшом количестве измеряемых параметров и при ограниченном времени измерения, не позволяющем использовать групповые УИП.
Индивидуальные УИП позволяют производить:
преобразование одного унифицированного сигнала в другой;
гальваническую развязку входных цепей;
размножение входного сигнала по нескольким выходам.
Однако применение в каждом измерительном комплексе ИИС своего УИП усложняет систему и снижает ее надежность и экономическую эффективность.
Групповые УИП(рис. 3.36б)) являются более эффективными с этой точки зрения они обслуживают определенную группу первичных преобразователей, выходные сигналы которых представляют собой однородные физические величины. Они располагаются в Ииспосле коммутатора и управляются совместно с последним блоком управления.
При построении многоканальных ИИС разнородных физических величин последние группируются по роду физической величины, а каждая группа подключается к соответствующему групповому УИП.
Многоканальные УИП.(рис. 3.36в)) Если измеряемые физические величины в основном разнородные, то в ИИС могут применяться многоканальные УИП, которые представляют собой объединенные в одном корпусе или одной плате несколько индивидуальных УИП. Преобразование информации осуществляется поnвходам иnвыходам. Основной конструктивной особенностью многоканального УИП является использование общих источника питания и системы контроля для всех индивидуальных УИП.

Рис. 3.36.основные типы унифицирующих
измерительных преобразователей
Основные функции, выполняемые УИП:
линейные (масштабирование, установление нуля, температурная компенсация);
нелинейные ( лианеризация) преобразования сигналов.
При линейной
характеристике первичного преобразователя
УИП выполняет линейные операции, которые
называются масштабированием. Суть
масштабирования заключается в следующем.
Пусть входной сигнал изменяется в
пределах отy1доy2, а
динамический диапазон выходного сигнала
УИП должен лежать в пределах от0доz .
Тогда для совмещения начала динамических
диапазонов УИП и первичного преобразователя
к сигналу ПП должен быть добавлен сигнал
.
Тогда для совмещения начала динамических
диапазонов УИП и первичного преобразователя
к сигналу ПП должен быть добавлен сигнал ,
а затем суммарный сигнал должен быть
усилен в
,
а затем суммарный сигнал должен быть
усилен в раз.
раз.
Возможен также вариант, при котором выходной сигнал ПП сначала усиливается, а потом совмещаются начала динамических диапазонов.
Первый вариант приведения выходного сигнала к унифицированному виду обычно используется в индивидуальных УИП, а второй в групповых.
Т.к. связь между выходным сигналом yПП и измеряемым параметром чаще всего нелинейная (например, у термопар, платиновых термопреобразователей сопротивления и т.д.) УИП должен выполнять операциюлинеаризации. Линеаризация заключается в спрямлении функции преобразования ПП. В этом случае линеаризующая функция должна иметь вид обратной функции преобразования ПП.
Для линеаризации функции преобразования в УИП используются специальные нелинейные звенья. Они могут включаться до линейного
унифицирующего преобразователя, после него или в цепь обратной связи усилителя, используемого для изменения масштаба измеряемой величины.
У
Uвх
UОС
Uвых
R1
R2
R3
R4
R5
D1
D2
D3
+
-


















(рис.3.37.)
Рис. 3.37.структурная схема УИП
С ростом напряжения на выходе усилителя увеличивается ток делителя и падение напряжения на каждом из резисторов R1R5.как только падение напряжения на каком-либо из резисторов достигает напряжения пробоя соответствующего стабилитрона, стабилитрон начинает шунтировать этот резистор. Сопротивления резисторов подбираются таким образом, чтобы получать требуемую зависимость напряжения обратной связиUОСинвертирующего усилителяУ, снимаемого с резистораR5, от выходного напряжения усилителя.
Типовой аналоговый УИП содержит в своем составе:
выходной усилитель;
устройство гальванической развязки;
функциональный преобразователь, линеаризующий сигнал ПП;
выходной усилитель;
стабилизированный источник питания.
Некоторые первичные преобразователи в качестве выходного имеют сигнал переменного тока такой сигнал модулируется либо по амплитуде (например, дифференциальные трансформаторные преобразователи), либо по частоте (например, пьезорезонаторы).
В качестве примера рассмотрим структурную схему УИП, предназначенного для преобразования переменного напряжения датчиков давления, перепада давления, расхода, уровня, паросодержания в унифицированный сигнал постоянного тока 0…5 мА (рис. 3.38.).
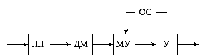
Рис. 3.38. Структурная схема УИП
Переменное напряжение с дифференциального трансформаторного первичного преобразователя демодулятором преобразуется в пропорциональное напряжение постоянного тока, которое усиливается магнитным МУи электроннымУусилителями постоянного тока, охваченными глубокой отрицательной обратной связью через устройство обратной связиОС, позволяющее при необходимости линеаризовать характеристику первичного преобразователя.
Унифицирующие измерительные преобразователи, работающие с частотными ПП, должны выполнять те же функции, что и УИП амплитудных ПП.