

Техническая механика часть 1
.pdfN |
M y 1 |
, |
(6.16) |
|
|
||||
|
|
|
где η – коэффициент полезного действия механизма. Для механизмов, применяемых в химическом оборудовании, КПД лежит в пределах
0,8 ÷ 0,85.
Если направление вращения кривошипа не совпадает с направлением уравновешивающего момента, то это означает, что механизм в данный момент времени движется по инерции, и мощность двигателя не расходуется.
6.5. Определение уравновешивающей силы (уравновешивающего момента) по методу Жуковского
В тех случаях, когда определять силы реакции во всех кинематических парах не нужно (например, при расчете мощности привода), уравновешивающую силу (или уравновешивающий момент) можно найти без построения плана сил более простым методом. Этот метод основан на следующей теореме: если какой-либо механизм с подвижностью, равной единице, находится под действием приложенных к нему сил в равновесии, то в равновесии будет находиться и повернутый на 90 0 план скоростей, рассматриваемый как рычаг с опорой в полюсе плана скоростей и нагруженный теми же силами, приложенными в соответствующих точках этого плана.
Очевидно, что формулировка теоремы предполагает использование принципа Даламбера. Следовательно, речь в теореме идет о равновесии системы сил, включая силы инерции, приложенные к звеньям механизма. Применение указанной теоремы к силовому анализу плоских рычажных механизмов заключается в следующем. Все силы, действующие на звенья механизма, переносятся без изменения их величины и направления в одноименные точки плана скоростей, повернутого на 900. Далее составляется уравнение равновесия по моментам всех перенесенных сил относительно полюса плана скоростей. С геометрической точки зрения это уравнение можно рассматривать как условие равновесия некоторого рычага («рычага» Жуковского) с опорой в полюсе. Единственным неизвестным в уравнении будет уравновешивающий момент или момент уравновешивающей силы, что позволяет определить их величину.
Этот метод получил название метода Жуковского по имени ученого, который его разработал. Проиллюстрируем использование метода Жуковского на примере шарнирного четырехзвенного механизма, схема которого приведена на рис. 6.5, а. Нетрудно видеть,
141

что указанный механизм обладает одной степенью свободы. Поэтому к нему применима теорема Жуковского.
p 
А
FМ2
А
а)
F2
B
А 
2
1 Fу
1
О
б)
b
a
г)
 B
B
S2 M2
д)
 B
B
S2
F3
3
 О1
О1
в)
p
h3
F3
F2
b
a
Fу
h2
FМ2
Рисунок 6.5
142
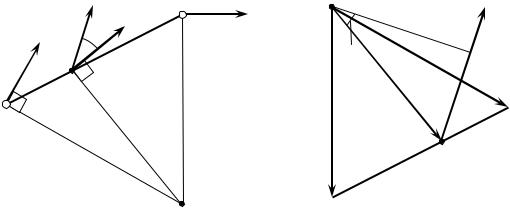
Пусть звенья 2 и 3 механизма нагружены заданными силами F2 и F3, которые являются равнодействующими внешних сил и сил инерции. Требуется определить уравновешивающую силу Fу, приложенную в точке А. В данном случае, очевидно, не имеет значения, что необходимо найти: уравновешивающую силу или уравновешивающий момент. Они связаны простым соотношением:
Му = Fу ОА.
Для применения теоремы, прежде всего, следует построить план скоростей. Для рассматриваемого механизма он приведен на рис. 6.5, б. Далее в соответствии с формулировкой теоремы Жуковского построенный план скоростей поворачивается на 900 и в точках плана, соответствующих одноименным точкам звеньев механизма, прикладываются векторы заданных и искомой сил (рис. 6.5, в). Тогда условие равновесия рычага относительно полюса р может быть
записано в виде: |
|
Мр(F2) + Мр(F3) + Мр(Fу) = 0 |
(6.17) |
или, используя измеренные длины плеч входящих в это соотношение сил, имеем:
Fy ap + F3 h3 + F2 h2 = 0. |
(6.18) |
||
Откуда для уравновешивающей силы получаем: |
|
||
Fy |
F2 h2 F3h3 |
. |
(6.19) |
|
|||
|
ap |
|
|
Если на какое-либо звено механизма, помимо сил, действует момент, то при использовании метода Жуковского он заменяется парой сил, момент которой равен действующему моменту. Например, если на звено 2 действует момент М2 (рис. 6.5, г), то его следует
заменить парой сил FM2, - FM2 , где FM2 = М2 / АВ (рис. 6.5, д). Далее к механизму применяется уравнение (6.17), в котором наряду с другими
заданными силами участвуют и силы FM2 и - FM2.
Мгновенная мощность привода при найденной величине уравновешивающей силы может быть определена по формуле:
N = Fy OA 1 = Fy VA. |
(6.20) |
Таким образом, с помощью теоремы Жуковского можно определить уравновешивающую силу (или уравновешивающий момент), не проводя силового расчета всего механизма.
143
Из теоремы Жуковского вытекает несколько важных следствий, из которых одно будет использоваться в главе 8 при анализе движения механизмов. Его целесообразно также сформулировать в форме теоремы. Если силу Fi, приложенную к какой-либо точке i-го звена механизма, перенести параллельно самой себе в одноименную точку повернутого на 900 плана скоростей i-го звена, то момент этой силы относительно полюса повернутого плана будет пропорционален мощности, развиваемой этой силой:
Ni = μV MP ( Fi ) |
(6.21) |
При этом коэффициентом пропорциональности будет служить масштабный коэффициент плана скоростей.
|
|
а) |
|
|
б) |
|
FК |
C |
V |
p |
|
|
|
C |
|
FК |
|
VB |
νК |
VК |
|
hF |
|
|
к |
||||
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
νК |
|
|
К |
|
|
|
|
B |
|
|
|
|
в |
|
|
|
|
|
к |
|
|
π |
|
с |
|
Рисунок 6.6
В силу важности сформулированной теоремы докажем ее. Пусть в результате кинематического анализа известны направление и величина скорости точек В и С некоторого звена ВС механизма (рис. 6.6, а). Найдем мгновенный центр скоростей П звена, восстановив перпендикуляры к векторам VB и VC. Используя масштабный коэффициент плана скоростей μV, построим повернутый на 900 план скоростей звена ВС (рис. 6.6, б). Вектор силы Fк, приложенный в точке К звена ВС , перенесем параллельно самому себе в одноименную точку к на повернутом плане скоростей.
Мощность, развиваемая силой Fк, равна, как известно, скалярному произведению вектора этой силы на вектор скорости VК точки приложения силы:
144
Nk Fk Vk FkVk cos k |
Fk ( pk) V cos k , |
(6.22) |
|
где νк – угол между векторами Fк |
и VК , (pk) – длина отрезка на плане |
||
скоростей, соответствующая скорости точки К. С другой |
стороны |
||
«момент» силы Fк относительно полюса р повернутого на 900 плана |
|||
скоростей будет равен: |
|
|
|
M p (Fk ) Fk hFk |
Fk ( pk) cos k . |
(6.23) |
|
где hFk – «плечо» силы Fк |
на «рычаге» Жуковского, т.е. расстояние от |
||
линии действия этой силы до полюса р.
Сопоставляя формулы (6.22) и (6.23), придем к соотношению (6.21).
6.6.Контрольные вопросы
1.Какие задачи решаются при силовом анализе рычажных механизмов?
2.Какие силы действуют на звенья механизма?
3.Как определяются силы инерции для звеньев, совершающих различные типы движения?
4.К чему приводятся силы инерции отдельных точек звена, если за точку приведения принят цент масс звена?
5.Каким образом определяется точка приложения результирующей силы инерции для звеньев, совершающих сложное движение?
6.Почему при силовом анализе механизм разбивается на группы Ассура?
7.Сформулируйте принцип Даламбера. В чем заключается существо метода кинетостатики?
8.Каков порядок силового расчета группы Ассура?
9.Как определяется реакция в среднем шарнире группы Ассура?
10.Каков порядок силового расчета ведущего звена базового механизма?
11.Что называется уравновешивающей силой (уравновешивающим моментом)? Поясните физический смысл уравновешивающей силы.
12.Сформулируйте теорему Н.Е. Жуковского о жестком рычаге?
13.Каков порядок определения уравновешивающей силы с помощью «рычага» Жуковского?
145
Глава 7. Трение в механизмах и машинах
7.1. Виды трения
Трение представляет собой универсальное явление, поскольку оно сказывается на работе практически всех механизмов и машин. В подразделе 1.8 кратко рассматривался вопрос о силах трения. Однако никаких количественных оценок, позволяющих обоснованно учесть трение при расчете конкретных механизмов, сделано не было. В настоящей главе влияние и учет сил трения анализируются для различных кинематических пар плоских рычажных механизмов и механических передач, основанных на передаче движения за счет сил трения.
По своей природе трение отражает довольно сложные процессы, происходящие на контактных поверхностях двух соприкасающихся тел, при которых возникают силы сопротивления их относительному перемещению. Различают два вида трения: трение скольжения и трение качения. При трении скольжения одни и те же участки соприкасающейся поверхности одного тела вступают в контакт с различными участками поверхности другого тела. При трении качения различные участки соприкасающейся поверхности одного тела последовательно вступают в контакт с соответствующими участками другого тела. Механизм возникновения силы сопротивления в том и другом случае был кратко рассмотрен в подразделе 1.8. Для количественного расчета сил трения необходимо более подробно проанализировать закономерности, управляющие трением в кинематических парах.
При оценке сил трения следует различать сухое трение (трение несмазанных поверхностей) и жидкостное трение (трение смазанных поверхностей). Трение при использовании смазки отличается от сухого трения не только величиной возникающих сил сопротивления, но и физическими процессами, происходящими при контакте соприкасающихся тел. Иногда говорят о полусухом и полужидкостном трении. В первом случае либо большая часть поверхности контакта лишена смазки, либо наиболее выступающие шероховатости одного тела не покрываются слоем смазывающей жидкости и приходят в непосредственное соприкосновение с поверхностью другого тела. При полужидкостном трении доля смазанной жидкостью контактной поверхности преобладает.
Разницу в физических механизмах возникновения сопротивления относительному движению соприкасающихся тел при сухом и жидкостном трении иллюстрирует рис. 7.1. Если рассмотреть при большом увеличении поверхности контактирующих тел, то обнаружится, что они не являются абсолютно гладкими. Степень их неровности (шероховатости) зависит как от материала тела, так и от
146
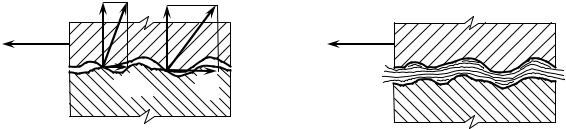
качества обработки поверхности, если это поверхности деталей. Трущиеся поверхности тел 1 и 2 при сухом трении изображены на рис. 7.1, а. Пусть к телу 1 приложена некоторая сила F, которая пытается сдвинуть его относительно тела 2. Элементы шероховатости на поверхности одного тела будут задевать за элементы шероховатости
а) |
б) |
Ri+1 |
Ni |
Ri |
Ni+1 |
||
F |
|
F |
Qi+1 |
|
Qi |
Рисунок 7.1
другого тела. В месте контакта двух таких микровыступов возникнет опорная реакция Ri, направленная по общей нормали к элементарным площадкам в месте контакта. Реакция Ri может быть разложена на две составляющие: одну – Qi, параллельную направлению возможного движения тела 1, и другую – Ni, перпендикулярную этому направлению. Совокупное действие составляющих Ni, возникающих во всех взаимодействующих парах микровыступов, будет уравновешивать силу давления тела 1 на тело 2. Совокупное действие составляющих Qi приведет к появлению равнодействующей силы, препятствующей движению тела 1 относительно тела 2. Эту силу принято называть силой трения. Вектор силы трения, располагаясь в общей касательной плоскости к поверхностям взаимодействующих тел, всегда направлен в сторону, противоположную относительной скорости этих тел.
С увеличением сдвигающего усилия F локальные силы Qi будут нарастать, возрастет и суммарная сила сопротивления. Выступы на поверхности тел будут деформироваться, причем как в упругой области, так и в области пластических деформаций. Наконец, при достижении некоторого предельного значения силы F силы сопротивления уже не смогут уравновесить ее: начнется движение тела 1 относительно тела 2. Движение также будет сопровождаться сопротивлением, обусловленным непосредственным взаимодействием неровностей на поверхностях обоих тел.
147
При жидкостном трении механизм возникновения силы сопротивления относительному перемещению тел совершенно иной. На рис. 7.1, б изображена увеличенная картина вблизи контактирующих поверхностей при жидкостном трении, когда трущиеся поверхности полностью разделены слоем смазки. Трение в этом случае обусловлено вязкими силами, действующими между смазочной жидкостью и поверхностью тел, а также в объеме самой смазки. Величина сил вязкости зависит от свойств смазки, ее температуры и ширины зазора. Как правило, силы трения смазанных поверхностей значительно ниже, чем при сухом трении. Кроме того, при жидкостном трении существенно снижается износ трущихся поверхностей. Однако для обеспечения жидкостного трения требуется выполнение следующих условий:
1.Жидкость, заполняющая зазор между телами, должна в нем постоянно удерживаться.
2.Внутреннее давление в смазке должно уравновешивать внешнюю нагрузку.
3.Толщина слоя смазки должна превышать сумму высот наиболее выступающих неровностей на поверхности тел.
Выполнение перечисленных условий связано с усложнением конструкторских решений при проектировании механизма. Например, первое условие будет выполнено, если в зазор между телами постоянно нагнетается смазочная жидкость.
7.2. Определение силы сухого и полусухого трения скольжения
Из вышеприведенного краткого анализа физического механизма трения скольжения следует, что величина силы трения может зависеть от множества всевозможных факторов. Сюда следует отнести характер материалов трущихся тел, степень шероховатости контактных поверхностей, наличие на них загрязнений, длительность предварительного неподвижного контакта, величину относительной скорости и т. д. Учет всех этих факторов при инженерных расчетах был бы неоправданно сложным. Поэтому величину силы трения связывают с единственным параметром, который интегрально учитывает все перечисленные факторы. Этот параметр называется коэффициентом трения f.
Для случая, приведенного на рис. 7.1, а, величина силы трения Fтр удовлетворяет неравенству:
Fтр f Р1n 2 , |
(7.1) |
где Р1n 2 - нормальная составляющая силы взаимодействия тел 1 и 2. Она представляет собой равнодействующую сил Ni всех пар
148
микровыступов, находящихся в контакте. Неравенство (7.1) |
||||||
показывает, что сила трения может принимать значения от нуля (в |
||||||
отсутствие сдвигающей силы F) до максимальной величины, |
||||||
определяемой правой частью неравенства. Следовательно, если |
||||||
сдвигающая сила не превышает величины f Р1n 2 , то она может быть |
||||||
уравновешена силой трения, и тело остается в покое. Как только |
||||||
сдвигающая сила превзойдет величину f Р1n 2 , |
начнется движение |
|||||
тела 1 относительно тела 2. Опыты показывают, что для выведения |
||||||
тела 1 из состояния покоя требуется сила, несколько большая той, |
||||||
которую приходится преодолевать при последующем равномерном |
||||||
движении. Соответственно различают трение покоя (или статическое |
||||||
трение) и трение движения (или кинетическое трение). Первое |
||||||
характеризуется коэффициентом трения покоя f0, второе – |
||||||
коэффициентом трения движения f. |
|
|
|
|||
Коэффициенты |
трения |
допускают |
n |
|
|
|
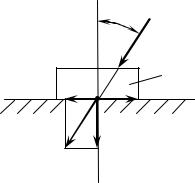
простую геометрическую интерпретацию. |
β |
|
||||
Пусть тело 1, |
неподвижно |
лежащее на |
|
|
Р |
|
поверхности тела 2, находится под |
|
|
||||
|
|
|
||||
действием нескольких сил, имеющих |
Рτ |
|
1 |
|||
равнодействующую Р (рис. 7.2). Выясним, |
|
|
|
|||
при каких условиях оно начнет двигаться. |
|
Fтр |
2 |
|||
Обозначим угол между направлением силы |
|
|||||
|
Рn |
|
||||
Р и нормалью n – n через . Тогда |
Р |
|
||||
|
|
|||||
проекции Рn и |
Р |
силы Р на направление |
n |
|
|
|
нормали и касательной к поверхности |
|
|
|
|||
могут быть определены по формулам: |
Рисунок 7.2 |
|
||||
|
Рn = Р cos , |
Р = P sin . |
|
|
(7.2) |
|
Проекция Рn |
играет роль нормальной составляющей силы |
|||||
взаимодействия тел 1 и 2, а проекция Р - роль сдвигающей силы. |
||||||
Сила трения Fтр согласно (7.1) будет равна: |
|
|
|
|||
Fтр = f0 Р n = f0 Р cos . |
(7.3) |
При увеличении угла величина сдвигающего усилия будет возрастать. По достижении этим углом некоторого значения 0 тело 1 сдвинется с места, поскольку величина сдвигающей силы сравняется с силой трения: Р = Fтр . Подставляя сюда правые части соотношений (7.2) и (7.3), получим:
P sin 0 = f0 Р cos 0 ,
откуда
149
f0 = sin 0 / cos 0 = tg 0 . |
(7.4) |
Угол 0 называют углом трения покоя. Из приведенного рассуждения ясно, что он представляет собой предельное значение угла между равнодействующей и нормалью n – n, при котором возможно равновесие. При < 0 тело 1 покоится относительно тела 2, при0 равновесие нарушается. Если менять положение силы Р в пространстве, а свойства контактной поверхности считать одинаковыми в различных направлениях, то область равновесия будет ограничена конусом с углом при вершине 2 0, который называется конусом трения покоя.
Аналогичную геометрическую интерпретацию имеет также и коэффициент трения движения f. Он численно равен тангенсу угла трения движения , под которым понимают угол между нормалью к контактной поверхности и направлением равнодействующей действующих на движущееся тело сил. При < происходит замедленное движение, при > тело 1 движется ускоренно, а при = - равномерно относительно тела 2. Угол трения движения меньше по величине, чем угол трения покоя, поскольку f < f0.
В справочной технической литературе численные значения коэффициентов трения покоя и трения движения приведены для различных сочетаний материалов, имеющих широкое практическое применение.
7.3. Определение потерь на трение в низших кинематических парах рычажных механизмов
Учет сил трения в кинематических парах плоских рычажных механизмов основан на результатах кинетостатического анализа, которые позволяют определить величину и направление реактивных усилий, отражающих силовое взаимодействие отдельных звеньев механизма. Как уже отмечалось, в рычажных механизмах с низшими кинематическими парами могут использоваться только поступательные и вращательные пары. Оценим эффект действия сил трения в сочленениях указанных пар.
Пусть два тела, образующие поступательную пару, перемещаются без ускорения относительно друг друга со скоростью Vотн. На тело 1 действуют силы F и Q, которые являются проекциями равнодействующей Р на касательное и нормальное направление к контактной поверхности (рис. 7.3). Движение тела 1 происходит за счет силы F, в то время как сила Q прижимает его к телу 2. Указанная сила вызывает появление реактивной силы N = Q, действующей на тело 1 и направленной по нормали к поверхности, а также силы трения Fтр, определяемой равенством (7.3): Fтр = f Q. Силы N и Fтр
150