

3.18. Регулирование скорости дпт последовательного возбуждения в схемах с шунтированием якоря
На практике применяется схема с шунтированием якоря, показанная на рис. 3.79. Характеристики ДПТ последовательного возбуждения в этой схеме получим, проведя следующий качественный анализ.
Шунтирующий Rш и последовательныйRп, резисторы вместе с обмоткой возбуждения образуют делитель напряжения. За счет этого к якорю ДПТ подводится пониженное напряжение, и его характеристики располагаются ниже естественной.

При токе якоря I=0 ток возбужденияIв=Iпза счет наличия шунтового резистораRшне равен нулю. Поэтому отличен от нуля и магнитный поток и двигатель имеет определенную конечную скорость идеального холостого хода0.
При скорости ДПТ большей 0ток в якоре меняет свое направление, и ток возбужденияIв=Iппо мере роста скорости уменьшается При стремлении тока якоря к значениюI=U/Rшток возбуждения и магнитный поток стремятся к нулю, а скорость ДПТ – к бесконечности, т.е. вертикальная линия с абсциссойI=U/Rшявляется асимптотой электромеханической характеристики, которая на основании проведенного анализа изображена на рис 3 80,а.
Для изображения участка механической характеристики во втором квадранте обратимся к формуле для электромагнитного момента ДПТ (3.3). При =0I=0 иМ=0, а приIU/RшФ0иМ0 Другими словами, ось скорости является асимптотой участка механической характеристики ДПТ во втором квадранте. Момент ДПТ, равный нулю при0и, в промежуточном интервале имеет максимумМmax, что и отражено в механической характеристике рис. 3.80,б.
Схемы с шунтированием якоря ДПТ последовательного возбуждения применяются для обеспечения низких скоростей движения, а также получения определенной скорости идеального холостого хода ДПТ последовательного возбуждения. Такие схемы нашли применение в электрическом транспорте, электроприводе грузоподъемных машин и ряде других случаев.
3.19. Торможение дпт последовательного возбуждения
Для ДПТ последовательного возбуждения возможны два варианта тормозного режима: при его работе генератором последовательно с сетью (режим торможения противовключением) и независимо от сети (режим динамического торможения).
Торможение противовключениемДПТ последовательного возбуждения, как и для ДПТ независимого возбуждения, может быть осуществлено двумя путями. Один из них связан с изменением полярности напряжения на обмотке якоря при сохранении того же направления тока в обмотке возбуждения. Одновременно с этим для ограничения переходного тока в цепь якоря ДПТ вводится дополнительный резисторRд.
В результате выполнения этих операций ДПТ (рис. 381) перейдет с естественной характеристики 1на характеристику2,участокbскоторой соответствует режиму торможения противовключением.
Торможение противовключением также реализуется в том случае, когда ДПТ последовательного возбуждения будет нагружен активным моментом Мс, превышающим момент короткого замыканияМк,з. Рассмотрим этот способ с помощью рис. 3.81.
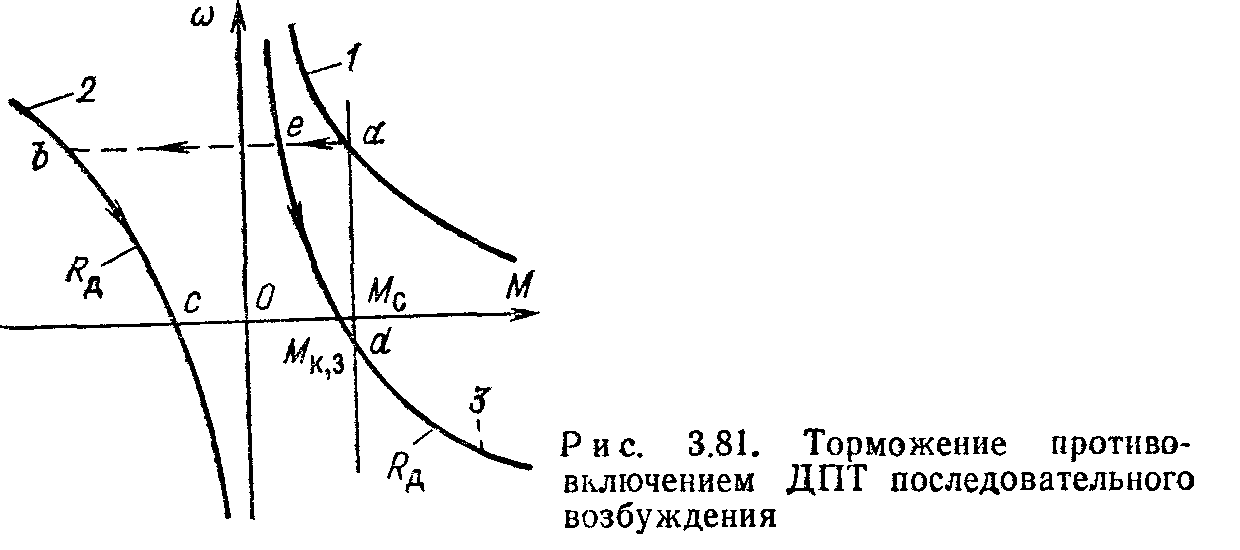
Допустим, что ДПТ в исходном режиме работает в точке ана характеристике1, преодолевая активный момент нагрузкиМс. Если теперь, не изменяя полярность напряжения на ДПТ, ввести в его якорную цепь дополнительный резисторRд, то ДПТ будет иметь характеристику вида3. Так как момент ДПТ при этом стал меньше момента нагрузки, то он начнет вначале тормозиться, а затем и разгоняться в противоположном направлении, пока в точкеdмоменты нагрузкиМси ДПТ не сравняются. Двигатель при этом будет работать в режиме торможения противовключением.
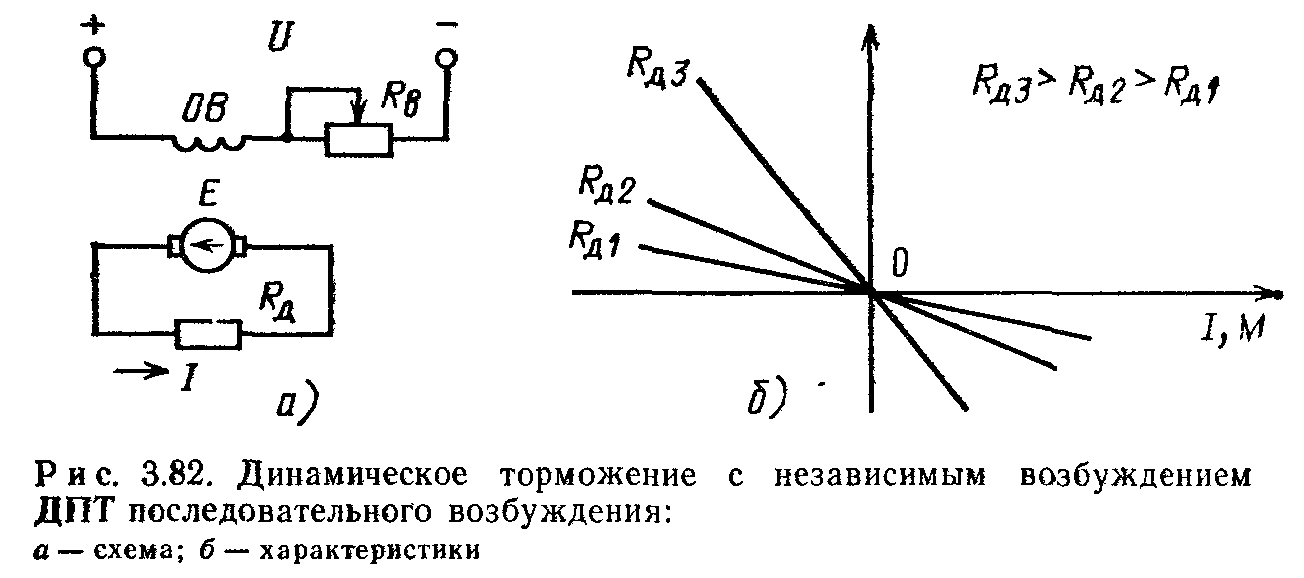
Динамическое торможениеДПТ последовательного возбуждения реализуется в двух схемах его включения.
В первой схеме (рис. 3 82, а) обмотка возбуждения ОД через дополнительный резисторRвподключается к источнику постоянного тока, а обмотка якоря замыкается на резисторRд. Получается схема, типичная для ДПТ независимого возбуждения, в которой ДПТ последовательного возбуждения имеет характеристики, изображенные на рис. 3.82,б.
Специфичным для ДПТ последовательного возбуждения является динамическое торможение с самовозбуждением, которое реализуется по схеме рис. 3.83. Для возникновения и существования режима самовозбуждения необходимо выполнение следующих условий: 1) наличие остаточного магнитного потока в ДПТ Фост; 2) совпадение по направлению Фости магнитного потока Ф, создаваемого током возбуждения; 3) замкнутая цепь якоря; 4) скорость ДПТ должна быть отличной от нуля;
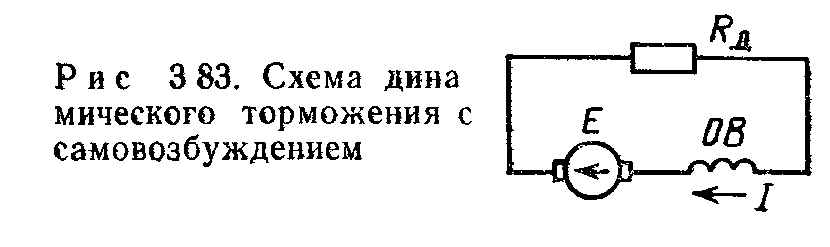
5)наводимая в якоре ЭДС должна быть равна суммарному падений напряжения в резисторах якорной цепи, т.е.E=IR.
При выполнении этих условий торможение самовозбуждением происходит следующим образом Вследствие наличия остаточного магнитного поля при вращении якоря в нем наводится ЭДС, под действием которой по якорю и обмотке возбуждения ДПТ протекает ток. Этот ток создает основной магнитный поток Ф, который, совпадая по направлению с остаточным потоком Фост, приведет к увеличению ЭДС. Это, в свою очередь, повлечет за собой увеличение тока в ДПТ, и такой процесс самовозбуждения ДПТ будет продолжаться до тех пор, пока ЭДС не станет равной суммарному падению напряжения в цепи якоря.

Статические характеристики ДПТ последовательного возбуждения в этом режиме можно получить графоаналитическим способом, использовав условие E=IR. Для этого на одной плоскости (рис. 3.84,а) совмещаются характеристики холостого ходаЕ(I),представляющие собой зависимость ЭДС машины от тока возбуждения при фиксированной скорости якоря=const, и вольт-амперная характеристика цепи якоряIR(I).
Точки пересечения этих характеристик соответствуют установившемуся режиму при данных параметрах цепи якоря ДПТ и его скорости. Так, при суммарном сопротивлении цепи якоря R1точками установившегося режима являются точки12 и 3, а при другом, большем сопротивлении цепи якоряR2>R1 –точки4и5.
Если теперь использовать координаты этих точек установившегося режима, а именно значения скорости и тока, то можно получить искомые статические электромеханические характеристики ДПТ. На рис. 3.84, бвыполнено это построение, в результате которого получены электромеханические характеристики для двух принятых значений суммарного сопротивления цепи якоряR1иR2. Механические характеристики ДПТ последовательного возбуждения могут быть получены из электромеханических характеристик при использовании универсальных характеристик.
Отметим, что для режима торможения с самовозбуждением существует определенное критическое сочетание параметров, соответствующее границе этого режима. Такому критическому сочетанию на рис. 3.84, апри сопротивлении цепи якоряR1соответствует скорость4=кр1(при сопротивленииR2–скорость3=кр2). При меньших скоростях самовозбуждение ДПТ не наступает.
Режим торможения с самовозбуждением используется для интенсивного электрического торможения в электроприводах транспортных в грузоподъемных машин.