

Определение элементов внешнего ориентирования по опорным точкам
Для элементов внешнего ориентирования используется метод – по опорным точкам.
Опорная точка – точка координаты которой определены на местности (т.е во внешней системе координат) и она надежно распознана на снимке.
Рассмотрим варианты обратной связи.


 -
яв-ся неизвестными
-
яв-ся неизвестными
Одна опорная точка дает 2 уравнения с 6 неизвестными, поэтому необходимо min 3 опорных точки.
На практике используется не менее 4 опорных точек.

Указанные уравнения яв-ся не линейными и непосредственно такие уравнения решить нельзя. Наиболее оптимальный способ – разложение ряда Тейлора


Тогда приближенная формула будет выглядеть:

 -
общий
вид ряда Тейлора
-
общий
вид ряда Тейлора
 –функция
вычисленная по приближенным значениям
элементов
–функция
вычисленная по приближенным значениям
элементов
 –то
же самое что и для
–то
же самое что и для
 , только φ – другая; это функция вычисленная
по приближенным значениям элемента
, только φ – другая; это функция вычисленная
по приближенным значениям элемента
Приближенные значения задаются следующим образом




Если
снимки плановые (суммарный угол наклона
меньше 3°), то
 задаётся 0.
задаётся 0.
Полученные уравнения решаются итерационным способом до тех пор пока поправки не станут меньше ошибок измерений.
Геометрические искажения изображения
Влияние угла наклона снимка

p - наклонный снимок
p0 - горизонтальный снимок
a - изображение т А на горизонтальном снимке
a0 - изображение т А на наклонном снимке
α – угол наклона снимка
δτα0 - ошибка вызванная углом наклона снимка



Влияние рельефа местности


A′ - ортогональная проекция т А…
h - превышение
Влияние кривизны небесного тела





Трансформирование снимков
Сущность и виды трансформирования
Трансформирование снимков – преобразование наклонного снимка произвольного масштаба в горизонтальный снимок заданного масштаба.
Горизонтальный снимок плоской местности (центральная проекция) соответствует ограниченному участку топографической карты (ортогональной проекции) поэтому если преобразовать наклонный снимок в горизонтальный заданного масштаба, то положение контуров на снимке будет соответствовать положению контуров на топографической карте соответствующего масштаба.
Методы трансформирования снимка:
Графическое
Аналитическое
Фотомеханическое
Цифровое
Орто трансформирование – такое трансформирование, при котором учитывается и устраняется влияние рельефа
Графическое трансформирование


Аналитическое трансформирование


|
|
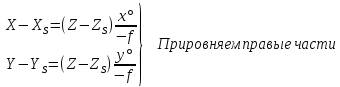
Формула связи координат соответственных точек на горизонтальном и наклонном снимках |

При этом способе координаты измеренные на наклонном снимке и при помощи формул преобразования координат на горизонтальном снимке
Фотомеханическое трансформирование
Выполняется при помощи спец приборов – фототрансформаторов. Данный метод основан на обратимости фотографического процесса. Для этого необходимо использовать проектирующую камеру подобно той, которой выполнялась съемка.
Если камере задать такое положение, которое было в момент съемки и восстановить связку лучей, то восстановится картина существовавшая в момент съемки.

Цифровое трансформирование
Цифровое изображение – матрица чисел каждый элемент которого соответствует яркости элемента исходного изображения
Исходным изображением может яв-ся аналоговый снимок или изображение , изображение объекта или пространства или пространства объекта на матрице или линейки ПЗ съемочного устройства либо изображение полученное путем сканирование пространства объекта.

Pmn – цифровое изображение
m - кол-во строк,
n – кол-во столбцов,
Pij - яркость пикселя в i строке и j столбце
Система координат цифрового изображения задается направляющими сканера или расположением строк и столбцов матрицы или линейки ПЗС съемочного устройства. Чаще всего начало системы координат цифрового изображения находится в левом верхнем углу.

Оцхцуц – СК цифрового изображения
На первом этапе цифровой обработке выполняется внутреннее ориентирование снимков, т.е устанавливается связь между СК снимка Оху и СК цифрового изображения для этого сначала вводятся значения элементов внутреннего ориентирования хоуоfо, а затем выполняются измерения координат.
Измерения координат координатных меток снимка в СК цифрового изображения.
Для каждой координатной точки записываются уравнения следующего вида:

 –берутся
из паспортных данных аэрофотоаппарата
–берутся
из паспортных данных аэрофотоаппарата