

ющего и апериодического звеньев. Но так как оно достаточно часто встречается в системах управления, то его иногда рассматривают как самостоятельное типовое линейное звено.
К этой группе очень часто относят также звено чистого запаздывания. Само по себе это звено нельзя считать линейным, но к системам, имеющим в своём составе помимо типовых линейных звеньев звено запаздывания (система при этом называется особой линейной системой), с успехом применяются некоторые методы расчёта, предназначенные для линейных систем. Поэтому имеет смысл изучить его свойства в составе вышеприведённой группы звеньев.
Полную информацию о свойствах линейного типового звена в переходном и установившемся режимах можно получить из переходной характеристики.
Переходной характеристикой называется график переходного про-
цесса на выходе звена при подаче на его вход единичного ступенчатого воздействия при нулевых начальных условиях.
Единичное ступенчатое воздействие – это такое воздействие, которое мгновенно возрастает от нуля до единицы и далее остаётся неизменным. Применение в данном случае единичного ступенчатого воздействия оправдано тем, что к линейным объектам применим принцип суперпозиции и наложения. Физически это означает следующее: если к линейному звену приложено несколько воздействий, то суммарный эффект от этих воздействий может быть определён как сумма эффектов от каждого из этих воздействий. Кроме того, единичное воздействие унифицирует расчеты и упрощает сравнение полученных результатов.
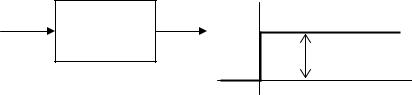
На рис.1.1 представлены: а) блочная схема типового звена, б) входное единичное ступенчатое воздействие.
Хвх |
Типовое |
Хвых |
Хвх |
|
|
|
|
|
|
|
линейное |
|
|
|
|
звено |
|
1 |
t |
|
|
|
||
|
|
|
|
а |
б |
Рис. 1.1
Переходную характеристику любого типового звена можно найти и построить по переходной функции (формуле), которая является решением дифференциального уравнения звена при
единичном воздействии и нулевых начальных условиях, или методом структурного моделирования.
7
В табл. 1.1 приведены дифференциальные уравнения, переходные функции и переходные характеристики типовых линейных звеньев, изучаемые в настоящей работе. Параметры типовых звеньев имеют следующие обозначения:
k – коэффициент передачи,
T, T1, T2 – постоянные времени в секундах, τ – время запаздывания в секундах,
A = T2 – коэффициент демпфирования колебательного звена,
T1
α и β – действительная и мнимая части корней характеристического
уравнения колебательного звена при А < 2,
АO = |
|
α2 |
+β2 |
и ϕ0 = arctg |
β |
– амплитуда и фаза, соответ- |
|
β |
α |
||||
|
|
|
|
|||
ствующие нулевым начальным условиям в решении дифференциального уравнения колебательного звена при А < 2,
на, αи – угол наклона переходной характеристики интегрирующего зве-
УУР – уровень установившегося режима Обратим внимание, что дифференциальное уравнение колебательно-
го звена может иметь и другую форму записи, эквивалентную той, что
приведена в табл. 1.1:
T |
d2Xвых |
dXвых |
вх . |
||
ξT |
+ 2 + X |
dt |
=kXвых |
||
|
dt2 |
|
|
|
|
|
|
8 |
|
|
|

9
Наименование
звена
Интегрирующее
Апериодическое
Колебательное
Реальное
дифференцирующее
Звено
запаздывания
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.1 |
|
|
|
|
Дифференциальное |
|
|
Переходная функция |
|
Переходная |
|
|||||||||||||
|
|
|
уравнение звена |
|
|
характеристика |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
dXВЫХ = k X |
|
|
|
|
|
X |
|
|
(t) = k t |
XВЫХ |
αи=arctgk |
|
|||||||
|
|
|
ВХ |
|
|
|
ВЫХ |
|
|
|
||||||||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
αи |
t |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
T dXВЫХ + XВЫХ = k XВХ |
|
X |
|
|
(t) = k (1−e−T ) |
XВЫХ |
T |
|
|||||||||||||
|
|
|
|
k |
УУР |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
ВЫХ |
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T2 |
d2X |
ВЫХ +T |
dX |
ВЫХ + X |
|
= k X |
|
При А < 2 |
|
|
|
|
|
|
XВЫХ |
А<2 |
|
|||||
|
|
|
|
|
|
|
|
k |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
1 |
dt2 |
2 |
dt |
|
|
ВЫХ |
|
ВХ |
XВЫХ(t) = k (1−e−α t |
AoSin(βt +ϕo )) |
|
|
t |
|||||||||
|
T dXВЫХ + X |
|
|
= k dXВХ |
|
|
X |
|
|
|
(t) = k e−T |
XВЫХ |
|
|
||||||||
|
|
|
|
|
|
|
|
k /T |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
dt |
|
ВЫХ |
|
|
dt |
|
|
|
|
ВЫХ |
|
|
T |
|
T |
t |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
XВЫХ
XВЫХ (t) = XВХ(t −τ) |
XВЫХ(t) =1 (t −τ) |
1 |
τ t
Параметры этого уравнения связаны с табличными следующими соотношениями:
T = T1, ξ = T2 / 2T1 = 0.5 А.
Здесь ξ – коэффициент демпфирования для второй формы записи дифференциального уравнения колебательного звена.
Кроме того, у колебательного звена при коэффициенте демп-
фирования А ≥ 2 или ξ ≥ 1 переходная характеристика будет иметь другой вид – монотонный (без колебаний), так как в этом случае корни характеристического уравнения становятся отрица-
тельными действительными.
При фиксированных значениях параметров типовых звеньев по переходной функции можно легко найти начальные – Хвых (0)
и конечные – Хвых (∞) значения выходной величины, а по переходной характеристике увидеть, что каждому звену соответствует определённый характерный для него вид переходного процесса при одном и том же единичном входном воздействии – Хвх = 1(t).
Более глубокие исследования динамических свойств при изменении параметров типовых звеньев связаны с многократными построениями переходных характеристик, что представляет собой довольно трудоёмкую процедуру.
Удобным и наглядным в таком случае оказывается метод структурного моделирования с применением персональных компьютеров.
Для моделирования типового звена достаточно по исходным данным (структурной схеме и численным значениям параметров) составить схему модели и ввести её в прикладную программу
«MATLAB &SIMULINK»).
Передаточные функции и структурные схемы изучаемых типовых звеньев приведены в табл. 1.2. Численные значения параметров будут заданы в программе работы.
В методе структурного моделирования решение дифференциального уравнения и вывод переходных характеристик на экран монитора выполняет соответствующая прикладная программа.
При изменении какого-либо параметра звена изменяется его переходная характеристика, а следовательно, и свойства исследуемого звена. Для удобства сравнения свойств типовых звеньев при вариации параметров, а также при охвате звена обратной связью в ТА У принято оценивать переходные характеристики следующими параметрами:
10
• в установившемся режиме – уровнем установившегося
режима (Хвых (∞));
• в переходном режиме – быстродействием в секундах (Tрег), максимальным отклонением выходной величины от уров-
ня установившегося режима в процентах (σmax%), количеством колебаний (ккол).
Примечание. Аналогичный параметр применительно к системам автоматического управления (регулирования) в ТАУ называется временем регулирования и обозначается Tрег. Здесь использовано это обозначение.
Под быстродействием понимается время, за которое переходная характеристика входит в пятипроцентную зону (±5% от уровня установившегося режима) и более из неё не выходит.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Наиме- |
|
Передаточная |
|
|
|
|
|
|
|
|
Структурная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
новаие |
|
|
функция |
|
|
|
|
|
|
|
|
|
|
|
схема |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Simulink |
||||||||||||||
звена |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X вх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Инте- |
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X вых |
|
||||||||||||||||||||
|
W(p) = |
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
гриру- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ющее |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X вх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Апери- |
W(p) = |
|
|
k |
|
|
|
|
|
|
|
|
|
k |
|
X вых |
|
|||||||||||||||||||||||||||||
одиче- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Tp +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
Tp +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
ское |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(p) = |
|
|
X вх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Колеба |
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
X вых |
|
|
|
|
||||||||||||||
тельное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T12p2 +T2p +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
T2p2 +T p +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Реаль- |
|
|
|
|
|
|
ks |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ное |
W |
(s) = |
|
|
|
|
X вх |
|
|
|
|
|
|
ks |
|
|
|
|
|
|
|
X вых |
|
|
|
|
||||||||||||||||||||
рен |
Ts +1 |
|
|
|
|
|
|
|
|
|
|
|
Ts +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
диффе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
циру- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ющее |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W (s) = ke−τs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Звено |
|
|
X вх |
|
|
|
|
|
|
|
|
ke−τs |
|
|
|
|
|
|
|
X вых |
|
|
|
|||||||||||||||||||||||
запаз- |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
ния |
|
s = p dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
дыва- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11