

ФНЧ КодерДискретизатор
Квантователь





Канал ТЧ ИКМ - канал
ФНЧ
Декодер



Рис. 7.4. Структурная схема системы ИКМ
Искажения (шум) квантования, возникающие при преобразовании аналогового сигнала в цифровую форму, обычно выражаются в виде отношения средних мощностей сигнала и шума, т.е. отношения сигнал-шум квантования (ОСШК) Рс/Рш.кв. ОСШК, выраженное в децибелах, при равномерном квантовании определяется соотношением:
Рс / Рш.кв = 6m + 4,8 – 20 lg Q, дБ, (7.2)
где Q – значение пик-фактора сигнала. Отсюда имеем:
для гармонического сигнала (Q = 2) Рс / Рш.кв = 6m + 1,8, дБ;
для речевого сигнала (Q = 12 дБ) Рс / Рш.кв = 6m – 7,2, дБ.
Система ИКМ с линейным квантованием практически не применяется, поскольку для достижения приемлемого качества восприятия восстановленного речевого сигнала при равномерном квантовании необходимо обеспечить m ≥ 12. Столь большое число уровней квантования nмакс = 212 при Fд = 8 кГц требует, чтобы скорость Rц передачи символов в канале была не менее 96 кбит/с. Для существенного уменьшения скорости Rц цифрового потока прибегают к нелинейному квантованию (рис. 7.5а) в процессе мгновенного компандирования (МК), когда на передающей стороне РС подвергают компрессии по логарифмическому закону, а на приемной осуществляют обратную операцию – экспандирование с помощью экспоненциального преобразования. При МК устраняется психофизическая избыточность, определяемая низкой заметностью искажений квантования на фоне сильного сигнала.
В электросвязи используется ИКМ с компандированием либо по - закону, либо по А - закону; характеристика компрессии по - закону приведена на рис. 7.5б для разных значений коэффициента сжатия. Обычно используют = 30; 100; 255 или А = 87,6. Структурная схема системы ИКМ с МК дополняется элементами логарифмического компандера (рекомендация ITU-T G.711, 1960 г.). Так, можно либо компрессировать исходный сигнал по логарифмическому закону с последующим равномерным квантованием при сравнительно малом числе уровней (например, при m = 8), либо компрессировать предварительно преобразованный в цифровую форму сигнал при сравнительно большом исходном числе уровней квантования (например, при m = 12) с последующим преобразованием к восьмиразрядному коду (m = 8). Результатом преобразования является двоичная последовательность, передаваемая со скоростью Rц = 64 кбит/с.

Рис. 7.5. Принцип нелинейного квантования (а) и характеристики компрессии по - закону (б)
Из-за трудностей реализации неравномерного квантования с аналоговыми компрессорами переходят к цифровым, у которых плавная характеристика компрессии заменяется линейно-ломанной аппроксимирующей функцией с различным числом сегментов.
8.Дифференциальные методы кодовой модуляции
В обычной системе с ИКМ каждый отсчет входного сигнала кодируется независимо от всех остальных. В то же время анализ показывает, что речевой сигнал (РС) характеризуется сильной автокорреляцией - коэффициент корреляции (мера предсказуемости) между соседними отсчетами, следующими с частотой 8 кГц, составляет в общем случае 0,85 или больше. Это означает, что две соседних выборки не могут сильно отличаться друг от друга. Соответственно, если кодировать только разность между ними, то можно снизить скорость передачи двоичных данных, представляющих речевой сигнал. Более того, знание нескольких последовательных отсчетов и их корреляционных свойств позволяет предсказать последующий отсчет. Заметим, что на протяжении некоторого ограниченного промежутка времени РС можно считать квазистационарным. Таким образом, вместо кодирования следующих друг за другом отсчетов или даже их разности, можно кодировать разность между текущим и предсказанным значением, которое предсказатель (варианты: экстраполятор, предиктор) вычисляет на основе информации о нескольких предыдущих отсчетах.
Первым примером «сжимающей» обработки считают дифференциальную ИКМ (ДИКМ). В этой системе предыдущий отсчет берется с определенным весом, формируя прогноз, а разница между предсказанным и реальным отсчетами речи подвергается квантованию по знаку и по величине, после чего формируются двоичные символы (кодовые слова) цифрового сигнала. По существу, здесь кодируется крутизна (производная) сигнала на передающей стороне и восстанавливается сигнал путем интегрирования на приемной стороне.
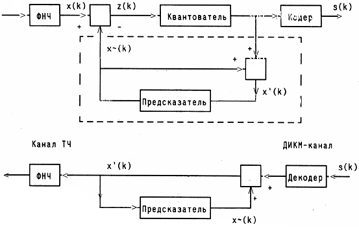
Рис. 8.1. Структурная схема системы ДИКМ
Таким образом, в дифференциальных кодеках квантованию и передаче по цифровому каналу подвергается разность между текущим отсчетом (выборкой) РС x(k) и его предсказанным значением x~(k), т.е. ошибка предсказания z(k) = x(k) – x~(k). Предсказываемое значение формируется из восстановленного сигнала x`(k) = x~(k) + zq(k); здесь zq(k) – квантованная ошибка предсказания. В качестве предсказываемого значения РС x~(k) в простейшем случае может быть использовано предыдущее отсчетное значение, хотя в общем случае используется выражение
Р
x~(k) = api x`(k-i), (8.1)
i=1
где api и Р - коэффициенты и порядок предсказания, когда значение сигнала в k-ый тактовый момент определяется через его восстановленные значения в предыдущие (k–1),..., (k–p) моменты. Выходной сигнал предсказывающего устройства представляет собой взвешенную сумму последних Р отсчетов, каждый из которых в свою очередь является суммой выходных сигналов предсказателя и квантователя. Таким образом, предсказанное значение является выходным сигналом фильтра с передаточной функцией вида P(z) = k Z-k, на вход которого поступает восстановленный сигнал x`(k). Здесь символ Z-1 означает задержку на период дискретизации. Так что предсказатель может быть реализован в виде трансверсального фильтра на основе М-отводной линии задержки (регистра сдвига) с временем задержки между отводами, равным периоду временной дискретизации Тд.
Классификационными признаками кодеров ДИКМ считаются наличие блока линейного предсказания и использование многоуровневого (больше двух уровней) квантователя. Блок линейного предсказания может состоять из двух частей — долговременного и кратковременного предсказателей. Если предсказатель хороший, то дисперсия z2 разности z(k) будет существенно меньше, чем дисперсия x2 отсчета речевого сигнала x(k), в результате квантователь с заданным шагом (или количеством уровней квантования) даст меньшую погрешность при квантовании разности, чем при квантовании исходного сигнала. Следовательно, шум квантования при подаче на вход квантователя z(k) будет меньше, чем при непосредственном квантовании (в обычной ИКМ). При одинаковом уровне шума число уровней квантования z(k) будет меньше, а длина кодового слова (число разрядов m) и необходимая скорость передачи Rц (7.1) будут снижены.
На приемной стороне из принятого цифрового сигнала аналогичным образом формируется квантованный аппроксимирующий сигнал, который после низкочастотной фильтрации и усиления поступает на выход ТФ канала.
Концепцию ДИКМ можно расширить таким образом, чтобы включить в цепь предсказания значения более чем одного предшествующего отсчета. За счет этого дополнительная избыточность, извлекаемая из всех предшествующих отсчетов, может быть взвешена и суммирована для получения лучшей оценки значения следующего входного отсчета. В связи с улучшенной оценкой диапазон ошибок предсказания уменьшается, что дает возможность кодировать с меньшим числом разрядов. Для систем с постоянными коэффициентами предсказания большая часть реализуемого выигрыша достигается, когда используются значения только трех последних отсчетов.
При анализе систем с ДИКМ и предсказанием первого порядка обычно получается уменьшение длины кодовой комбинации, соответствующей отсчету, на один разряд по сравнению с ее длиной в системах с ИКМ при эквивалентных показателях систем. В системах с ДИКМ с предсказанием третьего порядка может быть реализовано уменьшение на 1,5 - 2 разряда на отсчет. Таким образом, обычная система с ДИКМ может обеспечить то же качество, что и система с ИКМ-64 при скорости передачи 56 кбит/с, а в системе с предсказанием третьего порядка можно получить сопоставимое качество при скорости передачи 48 кбит/с.
Величина отношения сигнал-шум квантования (ОСШК) в такой системе увеличивается (по сравнению с оценкой (7.2) в системе ИКМ) пропорционально уменьшению дисперсии погрешности предсказания. Выигрыш в ОСШК (или коэффициент, характеризующий эффективность предсказания): Gp = x2 / z2, где z2 – дисперсия погрешности предсказания. Квантователь может быть адаптивный или неадаптивный, равномерный или неравномерный. ДИКМ обеспечивает выигрыш Gp 6 дБ (в случае неадаптивного равномерного квантования РС с частотой дискретизации 8 кГц) по сравнению с прямым квантованием (т.е. ИКМ).
Как и в системах с ИКМ, процесс АЦП в ДИКМ может осуществляться с компандированием, а также может использоваться техника адаптации для подстройки размеров шагов квантования в соответствии с уровнем средней мощности сигнала. Эти способы адаптации называют слоговым компандированием в соответствии с интервалом времени между подстройками усиления.
Дельта-модуляция (ДМ) считается частным случаем ДИКМ-кодирования. В методе ДМ вычисляется разница между текущим и предыдущим отсчетами. Затем эта разница подвергается квантованию в одноразрядном (двухуровневом) квантователе. Этот единственный разряд просто показывает полярность отсчета разностного сигнала и посредством этого указывает на то, увеличился или уменьшился сигнал за время, прошедшее после последнего отсчета. За упрощение схемы кодирования приходится платить необходимостью увеличения частоты дискретизации по сравнению с минимально возможной частотой дискретизации, используемой в ИКМ-кодере. В простейшем ДМ-кодере частота дискретизации представляет собой компромисс между скоростью выходного потока данных и приемлемым уровнем ошибок квантования. Наиболее значительные ошибки дискретизации сигнала вызываются двумя явлениями - перегрузкой по крутизне и шумом дробления. Суть первого явления заключается в том, что при кодировании быстро изменяющегося сигнала возникают ошибки, обусловленные невозможностью изменения аппроксимирующего сигнала более чем на один шаг квантования.
В простейшем случае линейной ДМ-квантователь имеет только два уровня (+ и – ) и фиксированный шаг квантования, а предсказатель представляет собой цифровое интегрирующее устройство, в котором сигнал x`(k) задерживается на время t и умножается на коэффициент , где 0 < 1. На выходе интегратора образуется ступенчатое напряжение, крутизна которого не может превышать значение Fд = /t, при котором кодированный сигнал отстоит от входного сигнала не более, чем на размер шага. Если дельта-модулятор не в состоянии отслеживать быстрые изменения во входном сигнале, то возникает "отставание" восстановленного сигнала от исходного (рис. 8.2), характеризуемое как искажение перегрузки по крутизне.

Рис. 8.2. Искажение перегрузки по крутизне при дельта-модуляции
Фактически, ДМ-кодер не успевает отслеживать быстрые изменения уровня сигнала и генерирует линейно изменяющийся квантованный сигнал. Шум дробления или гранулярный шум возникает при квантовании квазистационарного сигнала. При ДМ-кодировании постоянного сигнала результат представляет собой неравномерно чередующиеся положительные и отрицательные двоичные импульсы. Как показано на рис. 8.2, для медленно меняющихся сигналов основное значение имеет гранулярный шум, в то время как для быстро меняющихся сигналов - шум перегрузки по крутизне. Последний достигает пиковых значений непосредственно перед тем, как достигает максимумов кодируемый сигнал. Поэтому шум перегрузки по крутизне эффективно маскируется энергией речи, вследствие чего он менее заметен, чем шумы дробления.
Перегрузка по крутизне является не только ограничивающим фактором для системы с дельта-модуляцией, но и проблемой, присущей любой системе, когда кодируется разность значений соседних отсчетов. Система, оперирующая разностью, кодирует крутизну входного сигнала конечным числом разрядов и имеет, следовательно, конечный диапазон. Если крутизна превышает этот диапазон, происходит перегрузка по крутизне. В противоположность этому в обычной системе с ИКМ ограничена не скорость изменения входного сигнала, а максимальная кодируемая амплитуда. А дифференциальная система может кодировать сигналы с произвольно большими амплитудами, лишь бы эти большие амплитуды достигались постепенно.
Расчеты ОСШК при дельта-модуляции показывают, что последняя уступает ИКМ при больших скоростях передачи и превосходит ее при скоростях около 40 кбит/с. Так, для получения ОСШК, равного 35 дБ при частоте Найквиста (т.е. Fв) 3 кГц, требуется скорость передачи 200 кбит/с. Для улучшения эффективности ДМ применяют адаптацию - изменение шага в соответствии с нестационарными свойствами сигнала и прежде всего - в зависимости от усредненного за короткое время значения крутизны входного сигнала.
Системы с ДИКМ обеспечивают такое качество восстановления сигнала, которое сопоставимо с качеством ИКМ-кодирования, и на порядок более высокую помехоустойчивость. Для снижения погрешности передачи при ДИКМ и повышения эффективности ДМ параметры квантователя и предсказателя должны быть согласованы со статистическими характеристиками сигнала, а поскольку последние изменяются во времени - алгоритмы должны быть адаптивными.