

3. Разработка функциональной схемы мпс
При включении микропроцессорной системы, происходит начальная установка микроконтроллера, в течение 3 - 4 циклов. После чего начинает выполняться микропрограмма.
Для синхронизации работы узлов используется генератор тактовых импульсов. Генератор формирует сигналы с заданной частотой.
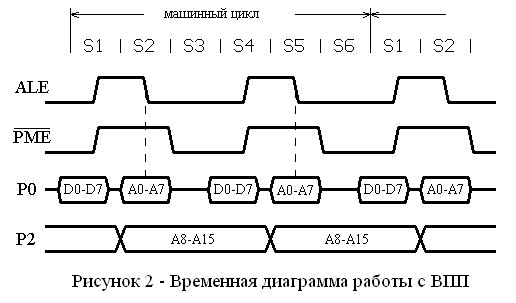
Обмен информации с внешним ОЗУ и ПЗУ производится через порт P 0 по общей шине. Для этого микроконтроллер вырабатывает управляющие сигналы RD и WR. При обращении к ВПП в МК 51 формируется 16-разрядный адрес, причем порт P0 используется в режиме временного мультиплексирования: в начале каждого машинного обращения к ВПП (фаза S2P1) через порт P0 выдается младший байт адреса, который должен быть записан во внешний регистр RG по отрицательному фронту сигнала ALE; низкий уровень сигнала PME, формируемый в течение фаз S3P1…S4P1 машинного цикла, разрешает выборку байта данных из ПЗУ, который затем поступает на линии порта P0 и вводится в микроконтроллер. Временная диаграмма работы с ВПП показана на рисунке 2.

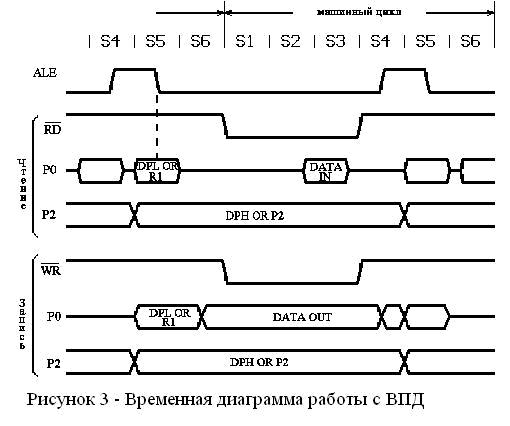
Для работы с ВПД , также как и для работы с ВПП используется порт P0 для выдачи младшего байта адреса и порт P2 для выдачи старшего байта адреса.
Младший байт адреса должен быть зафиксирован во внешнем регистреRG по отрицательному фронту сигнала ALE . В дальнейшем линии порта P0 используются для чтения или записи информации в/из микроконтроллера. При этом чтение информации стробируется сигналом RD, формируемым МК 51, а запись – сигналом WR. На рисунке 3 показана временная диаграмма работы МК51 в режиме обмена данными с ВПД.
Ввод информации с датчиков осуществляется через мультиплексор, подключенный к линиям порта P1.
Для управления объектами используются линии порта P3. Расширение каналов вывода осуществляется с помощью регистров, стробирование которых производится путем подачи тактовых сигналов, вырабатываемых на выходах P1.6-P1.7.
Ввод информации с датчиков осуществляется через мультиплексор, подключенный к линиям порта P1.
8
Для управления объектами используются линии порта P3. Расширение каналов вывода осуществляется с помощью регистров, стробирование которых производится путем подачи тактовых сигналов, вырабатываемых на выходах P1.6-P1.7.
Для организации временных интервалов при работе МПС используется встроенный в МК51 таймер счетчик Т/С1. Таймер/счетчик предназначен для подсчета внешних событий, для получения программно-управляемых временных задержек и выполнения времязадающих функций МК.

Код величины начального счета заносится в регистр Т/С1 программно. В процессе счета содержимое регистра Т /С1 инкрементируется. Признаком окончания счета является переполнение регистра Т /С1, т.е. переход его содержимого из состояния "все единицы" в состояние "все нули". Регистр таймер/счетчика доступен для чтения, и, при необходимости, контроль достижения требуемой величины счета может выполняться программно.
Режим работы микроконтроллера задается при начальной установке. Функциональная схема МПС приведена на рисунке 4.

|
Каналы |
|
|
|
|
|
|
|
|
|
|
ввода |
MX |
P1 |
P0 |
|
|
ПЗУ |
|
||
|
16 |
|
|
|
||||||
|
|
|
|
|
|
Данные |
|
|||
|
24 |
|
|
DEMA |
|
|
|
|
|
|
|
|
|
|
RG |
8 |
мл. |
16 Кб |
|
||
|
|
|
|
ALE |
|
|
байт |
|
||
|
|
|
|
|
|
Адрес |
|
|
||
|
|
|
|
P2 |
|
2 |
ст. |
|
|
|
|
|
|
|
|
|
байт |
|
|
||
|
|
|
|
PME |
|
|
OE |
|
|
|
|
|
|
P3 |
|
|
|
|
|
|
|
|
|
P3.7 |
RD |
|
|
|
ОЗУ |
|
||
|
|
P3.6 WR |
|
|
8 |
Данные |
|
|||
|
|
|
|
мл. |
|
|
||||
|
|
|
МК51 |
|
|
байт |
8 Кб |
|
||
|
|
|
|
|
Адрес |
|
||||
|
|
|
|
|
|
7 |
|
|||
|
|
|
|
|
|
ст. |
|
|
||
|
|
|
|
|
|
|
байт |
|
|
|
|
|
|
|
|
|
|
WE |
|
|
|
|
|
|
|
|
|
|
OE |
|
|
|
|
|
|
RG |
Каналы |
|
|
|
|
|
|
|
|
|
вывода |
|
|
|
|
|
||
|
|
|
P1.6 |
162 |
|
|
|
|
|
|
|
|
|
P1.7 |
|
|
|
|
|
||
|
|
Рисунок 4 - Функциональная схема МПС |
|
|
|
|
||||
|
|
|
|
9 |
|
|
|
|
|
|
![]()