

fullKG
.pdf28. Алгоритм выявления видимости части отрезка на основе его разбиения средней точкой.
Yв
|
Рн |
|
|
Рср’ |
|
|
|
Yн |
Хл |
Рср |
Хп |
|
Рк
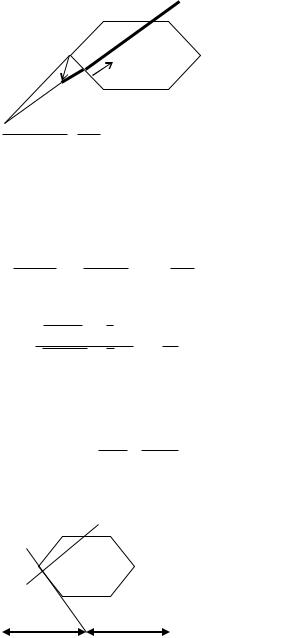
Находим среднюю точку Анализируются полученных два отрезка (Рн-Рср) и (Рср – Рк).
Рср – Рк – невидим, перенесли точку Рк на место Рср.
Оставшийся отрезок делит пополам Рср’.
Рассматриваем отрезок Рн-Рср’ виден
Рн - запомнили; Рср’-Рк – неизвестно
И так дальше его осуществляют пока мы не выйдем на границу окна, либо пока длина отрезка не станет равной или меньше одного пикселя.
Как только выходим на границу у нас обе точки видны и мы можем вывести полученный отрезок.
Если длина дошла до 0, а мы о нем ничего не знаем то он попал на границу и его надо выводить
Рср |
Если изначально дает два неопределенных отрезка, то один |
|
запоминаем и работаем с оставшимся, разбиваем его, а потом |
||
|
||
|
возвращаемся к запомненному отрезку и разбиваем его. |
29. Алгоритм отсечения отрезка сторонами произвольно расположенного выпуклого окна (алгоритм Кируса-Бека).
|
|
P2 |
Pi |
|
0 t 1 |
|
P(t)=P1+(P2-P1)t |
|
i |
|
|
P(t) |
n |
Bнi |
|
Bн-внутреннее, |
|
P1 |
|
|
|
nВНi нормаль к “i”грани |
|
|
|
( p(t) pi ) nВНi 0 (если это так, то можем найти точку пересечения с границей)
Можем найти t.
Можем определить видимую часть отрезка.
Все точки мы можем поделить на две группы:
-Точки входа в окошко
-Точки выхода из окна
(( p p ) ( p |
p ) t) n |
0 |
||||||
1 |
i |
|
2 |
1 |
|
ВНi |
|
|
Можно разделить эти две составляющие и получить “t” |
||||||||
|
( p p |
) nВНi |
|
W |
скалярное произведение векторов |
|||
t |
1 |
i |
|
|
|
|
||
( p |
p ) nВНi |
Q |
в числителе и знаменателе |
|||||
|
|
|||||||
|
|
|
||||||
|
2 |
1 |
|
|
|
|
|
|
Если Q>0 , то точка входа
Если Q<0 , то точка выхода
Если Q=0 , то -либо отрезок выражается в точку
-либо отрезок параллелен рассматриваемой стороне окна
p p |
// p |
p |
1 2 |
i 1 |
i |
Если W<0 , то точка находится вне окна Если W≥0, то точка P1 находится в окне.
2 3
1
4
0 5
вне окна |
в окне |

30. Алгоритм последовательного отсечения произвольного
многоугольника сторонами выпуклого окна.
Мн-к |
окно |
Мн-к
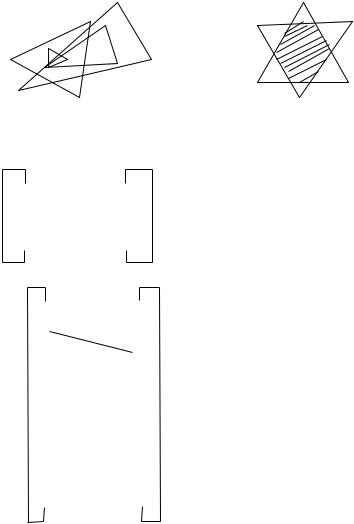
Если работаем с выпуклым окном, то рассматриваются стороны окна и смотрится: все что по стороне окна оставляем, а остальную часть отсекаем и так со всеми сторонами. Так мы можем сформировать всё, что останется в окошке, т.е. постепенно отсекается то что лежит вне окна.
1 вар
p
s
вне окна
В выходной массив заносим «0» точек.
2 вар |
p |
Внутри I окна
s
Вне окна
Тут мы должны найти точку пересечения «I» и занести в выходной массив, и конечную точку тоже заносим в выходной массив.
3 вар
p
s
В выходной массив заносим только конечную точку «р» , т.к. стартовая уже должна быть определена.
4 вар
p
I 
s
Заносим только точку “I” в массив.
Далее меняем стартовую и конечную точку местами. S->P (S – стартовая точка P - конечная)
4
2 |
3 |
|
1
Рассматриваем эту сторону и запоминаем точки 1 и 2.
31. Алгоритм отсечения произвольных многоугольников невыпуклыми окнами (алгоритм Вейлера-Азертона).
|
|
p2 |
|
w2 |
|
|
|
|
|
|
|
|
|
|
w2 |
p5 |
p1 |
i1 |
i2 |
p2 |
|
|
|||||
|
|
|
|
|
||
|
w6 |
|
|
i6 |
|
i3 |
w1 |
w5 |
p4 |
|
|
||
|
|
|
|
|||
|
p6 w4 |
|
p3 |
|
|
|
|
|
|
w1 |
i5 |
i4 |
w3 |
|
|
|
|
|||
p1 |
w3 |
|
|
p3 |
|
|
|
|
|
|
|
Точки пересечения принадлежат и окну и многоугольнику. Для окна и многоугольника составляются циклические списки.
p |
w |
|
|
1 |
1 |
p |
2 |
w |
|
2 |
|
p |
w |
|
|
3 |
3 |
В эти циклические списки вставляются точки пересечения окно со сторонами мн-ка.
p |
w |
|||
|
|
1 |
|
1 |
I |
1 |
I |
6 |
|
|
|
|||
I |
2 |
I |
1 |
|
|
|
|||
p |
2 |
w |
||
|
|
|
2 |
|
I |
3 |
I |
2 |
|
|
|
|||
I |
4 |
I |
3 |
|
|
|
|||
p |
w |
|||
|
|
3 |
|
3 |
I |
5 |
I |
4 |
|
|
|
|||
I |
6 |
I |
5 |
|
|
|
|||
При этом устанавливаются взаимно односложные двунаправленные связи.
Списки составляют так, что контур многоугольника и контур окна описываются по часовой стрелке.
Ищется любая точка входа в окно для описания списка многоугольника.
32. Алгоритм выявления охватывающего и внешнего многоугольника по отношению к окну.
(4) (5)
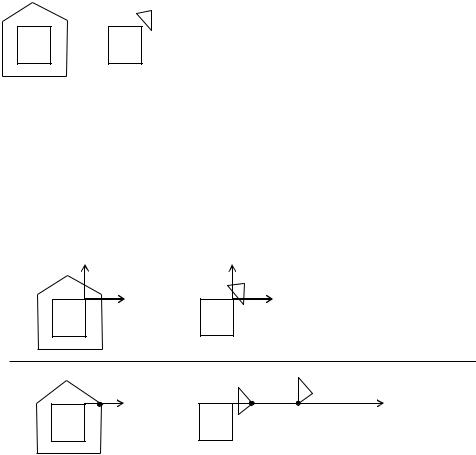
Если использовать четырех битовый код для всех точек для определения типа многоугольника:
Для определения (5) или (4) вариант используют лучевой тест.
Из любой точки внутри окна (или на границе) проводят в сторону многоугольника луч и смотрят сколько пересечений со сторонами многоугольника.
Если нечетное: n=2m+1 следовательно вариант (4) Если четное: n=2m следовательно вариант (5)
одна
точка
одна |
2 |
точки |
точка |
или |
|
|
|
|
|
0 |
точек |
попали на вершину, т.е. пересечение с двумя сторонами
Если попадаем на вершину, то в этом случае необходимо сдвинуть луч и посмотреть результат, либо посмотреть как эти стороны связаны с вершиной, если первая и вторая сторона лежат по обе стороны от луча, то такая точка считается за одну точку пересечения, а если лежат по одну сторону от луча, то такая точка считается за две или ноль точек.

33. Методы выявления факта выпуклости многоугольника и способы определения внутренних нормалей к его стороне.
1.Определить, что окно выпуклое.
2.Определить нормаль к стороне.
1.Определить, что окно выпуклое.
P2
P1 P3
P4
P0P6 P5
P(t)=P0+(P1-P0)t
Если в матричное уравнение прямой подставить значения точек P0…P6, то значение тестовой функции будет одного знака.
Матричное уравнение:
f(xi,yi)=
x x |
y y |
||
i |
0 |
i |
0 |
x x |
y |
y |
|
1 |
0 |
1 |
0 |
, i
2…5. - это тестовая функция
Если в эту значения P0…P6 , то
x x |
y y |
0 |
|||
|
1 |
|
|
1 |
|
x |
x |
y |
2 |
y |
|
2 |
1 |
|
1 |
|
|
- |
2 |
|
тестовую функцию постепенно поставить эта функция будет иметь один знак.
- Матричное представление прямой.
1 +
Все точки, которые лежат на прямой будут давать 0.
Справа от прямой точки будут давать знак “+”. А слева – “-”.
Выпуклость проверяется по всем сторонам, проверять знак долго, легче сравнить с “0”.
Если f2+fi<0 – окно не выпуклое.
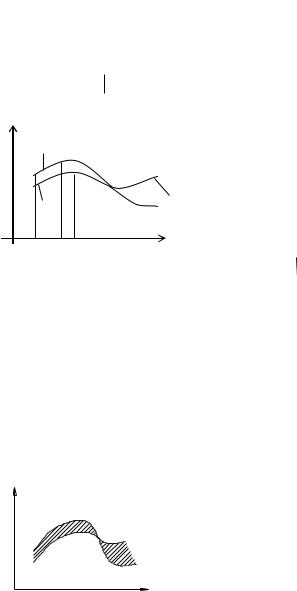
37. Алгоритм удаления невидимых линий, использующий принцип плавающего горизонта.
Используется когда есть функциональное описание поверхности: f (x,y,z)=0
Делается срез по координате z, т.е. при z=const.
g(x, y) |
z const 0 |
м ожем получить y g1 (x) |
Далее для этих функций должны построить кривые.
Построение начинается от |
z zmax т.к. оно наиболее близкое к наблюдателю |
имеем y g1 (x) z max |
и эта функция строится. |
Иными словами на экране
y |
|
|
i, j |
z 1 |
|
|
|
|
y |
|
|
i, j |
z |
|
|
i |
|
х1 х хj |
|
|
При следующем срезе |
zi |
|
строится новая функция
|
g |
|
|
|
|
|
|
|
1 |
z max |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
max |
z y |
i |
g |
(x) |
zi |
|
|
|
|
1 |
|
|||
y |
i, j |
g |
1 |
(x |
j |
) |
zi |
|
|
|
|
если
1.yi, j  zi yi, j
zi yi, j  zi 1
zi 1
2.yi, j  zi yi, j
zi yi, j  zi 1
zi 1
то эта часть видна не видна.
Необходимо для каждого “ x j ” отслеживать “ yij max |
”. |
Для проверки (сравнения) видна точка или не видна. |
|
Точки аппроксимируем отрезками, при этом получаем видимую и обратную сторону поверхности.
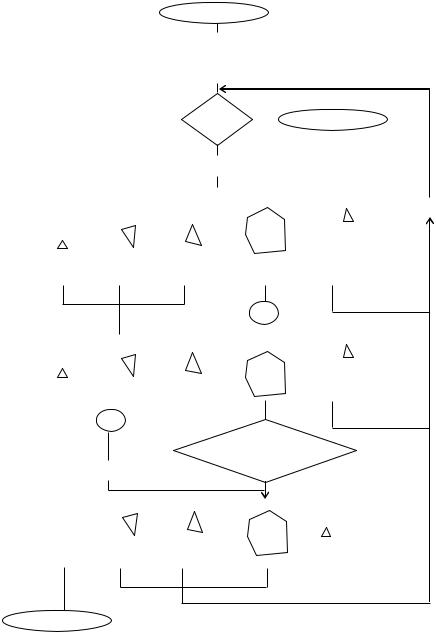
38. Общая структура блока просмотра и варианты, обрабатываемые блоком решения для алгоритма выявления видимости, в котором используется принцип деления окна.
m – количество |
Блок анализа |
|
|
|||
|
|
|
|
|
|
|
многоугольников |
начало |
|
|
|
|
|
начальная установка |
|
|
|
|
|
|
Zmin=0 т.е. совпадает с плоскостью визуализации |
|
|||||
i=1 |
|
|
|
|
|
|
|
i>m |
|
да |
конец |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
нет |
|
|
|||
взять i-ый многоугольник (наиболее дальний) с Zmax=min |
|
|||||
проверка на отношение к предшествующему окну (если |
i=i+1 |
|||||
оно было, т.е. не первый раз в цикле) |
|
|||||
|
|
|||||
внутри пересечение пересечение |
охватывает |
вне |
|
|||
стороной |
вершиной |
окно |
окна |
|
||
*
проверка на отношение к текущему окну
*
да |
Zмн-ка> Zокнаmin |
|
Zокна =Zмн-ка
нет
?
в окне больше одного мн-ка и окна надо делить
конец
39. Алгоритм Вейлера-Азертона выявления видимости граней.
Он базируется на алгоритме Вейлера-Азейтона.
Он позволяет отсекать произвольные многоугольники произвольным окном.
1 этап:
Предварительная сортировка по zmax ↓ всех многоугольников
2 этап:
он связан с отсечением многоугольников на плоскости визуализации
берем самый удаленный многоугольник (т.е. тот который ближе к наблюдателю)
z |
i |
|
max |
||
|
и используем его в качестве отсекателя.
При этом формируется два списка многоугольников: внутренний список и внешний список.
1 |
y |
|
|
2 |
проекции |
|
|
0 |
на XOZ |
z |
|
x |
|
1 |
2 |
I вариант |
|
|
|
II вариант |
|
1’ |
2’ |
один многоугольник |
|
пересекает другой |
|||
|
|||
|
|
||
1’’ |
|
III вариант |
|
2’’ |
|
||
|
|
Если на первом этапе: после предварительной сортировки по zmax ↓ всех многоугольников получился следующий порядок многоугольников: 1, 2, то на втором этапе: 21
|
1 |
2н(1) |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
отсекатель |
внутренний |
внешний |
|
|
|
список |
список |
|
|
12 |
|
|
1н(2) |
|
1 |
1 |
|
|
|
21 |
2н |
|
|
|
|

40. Алгоритм, использующий принцип трассировки лучей.
Н
Экран разбит на пиксели.
Находят точки пересечения луча со всеми объектами сцены (т.е. находят z для пиксельного элемента) для объектов i, j, k и т.д.
Далее их сортируют по z↑: zi , zk, zj , у того, где z максимум этим цветом и подкрашивают точку на экране.
Если лучи параллельны, то проходим по всем пикселям и формируем картинку.
75-95% времени алгоритма сводится к определению точек пересечения (т.е. z).
Для ускорения стремятся упростить задачу поиска точке пересечения.
Не ищут точки пересечения, а сначала объект заменяют на сферичискую или кубовидную оболочку.
Кубовидная: ymax 

ymin 
 хmin хmax
хmin хmax
хороша тем, что четко определены: хmin , хmax , ymin , ymax. Следовательно зная координаты луч (хi , хi) можем сразу сказать лежит
ли «х» в пределах хmin - хmax и «y» в пределах ymin - ymax или нет. Если нет, то переходим к рассмотрению следующего объекта.
Сферическая:
(x,y) - центр
если хi , yi: (xi xц )2 ( yi yц )2 Rоболочки2
то попадает в оболочку, тогда имеет смысл искать точки пересечения, иначе переходим к следующему объекту.