

15
.docЛекция №15
План
-
Потенциальное силовое поле и силовая функция.
-
Потенциальная энергия.
-
Принцип Даламбера для материальной точки.
-
Принцип Даламбера для несвободной механической системы.
-
Динамические реакции при вращении твердого тела вокруг неподвижной оси.
1. Потенциальное силовое поле и силовая функция.
Рассматриваемая теорема о кинетической энергии позволяет решать задачи по определению работы, не зная закон происходящего движения. Важно было установить, каков класс сил. Работа по перемещению сил F, приложенных к точке М.
 (15.1)
(15.1)
Вычислить стоящий справа интеграл, не зная закон происходящего движения, т.е. зависимость x, y, z от t можно лишь в случае, когда сила зависит от положения точки, т.е. от ее координат x, y, z.
Такие силы образуют силовое поле.
Силовое поле – это часть пространства, в каждой точке которого на помещенную туда материальную частицу действует определенная по модулю и направлению сила, зависящая от положения частицы. Примером силового поля служит поле тяготения планеты или Солнца. Т.к. сила определяется ее проекциями на оси координат, то силовое поле задается уравнениями
![]()
Работа сил, образующих силовое поле, зависит от вида траектории, вдоль которой перемещается точка приложения силы. Но если окажется, что выражение, стоящее в формуле (15.1) под знаком интеграла и представляющее собой элементарную работу силы F, будет полным дифференциалом некоторой функции U(x,y,z)
dA=dU(x,y,z)
![]()
Тогда работу
![]() можно вычислить
не зная заранее траекторию точки М.
можно вычислить
не зная заранее траекторию точки М.
Функция U(x,y,z), дифференциал которой равен элементарной работе, называется силовой функцией.
Силовое поле, для которого существует силовая функция, называется потенциальным силовым полем, а силы, действующие в этом поле – потенциальными силами.
В результате имеем
где
![]()
Отсюда, работа потенциальной силы равна разности значений силовой функции в конечной и начальной точках пути и от вида траектории движущаяся точка не зависит.
Основное свойство потенциального силового поля (ПСП) – работа, производимая силами поля при движении в нем материальной точки, зависит только от начальной и конечного положения этой точки и не зависит от вида траектории, ни от закона ее движения.
2. Потенциальная энергия
Для потенциальных сил можно ввести два понятия о потенциальной энергии, как о величине, характеризующей “запас работ”, которым обладает материальная точка в данном пункте силового поля (с.п.). Чтобы сравнивать запасы работы нужно условиться о выборе нулевой точки О, в которой запас работ равен нулю.
Выбор точки отсчета – произвольный.
Потенциальная энергия – скалярная величина, равная той работе, которую производят силы поля при перемещении точки из положения М в положение О.
![]()
Из определения потенциальная энергия зависит от координат x,y,z в точке М, т.е.
![]() (x,y,z)
(x,y,z)
Будем считать, для функции П(x,y,z) и U(x,y,z) совпадающими, тогда П(x,y,z)=-U(x,y,z) т.е. потенциальная энергия в каждой точке силового поля равна значению силовой функции в этой точке, взятого с обратным знаком.
Отсюда, при рассмотрении всех свойств ПСП вместо силовой функции можно пользоваться понятием о потенциальной энергии.
![]()
Работа потенциальной силы равна разности значений потенциальной энергии движущейся точки в начальном и конечном положении.
Закон сохранения механической энергии
Допустим, что все действующие на систему внешние и внутренние силы потенциальны. Тогда для каждой из точек системы работа приложенных сил
![]()
![]() Для всех
внутренних и внешних сил
Для всех
внутренних и внешних сил
Тогда подставим
![]()
![]() или
или
![]()
При движении под действием потенциальных сил сумма кинетической и потенциальной энергии системы в каждом ее положении остается величиной постоянной.
В этом и состоит закон сохранения механической энергии, а величина (Т+П) называется полной механической энергией системы.
3. Принцип Даламбера для материальной точки.
Наиболее важное применение принципа – для определения реакций связей при заданном законе движения, т.е. для решения первой задачи динамики.
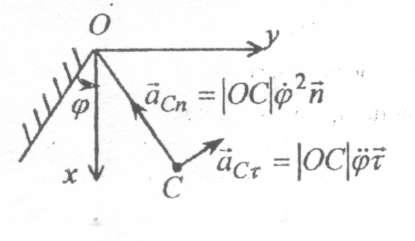
Силой инерции материальной точки называется вектор, равный по модулю произведению массы точки на модуль ее ускорения и направленный противоположно этому ускорению:
![]()
Поскольку при
движении точки по траектории ускорение
складывается из касательного и нормального
ускорений
![]() ,
то сила инерции также может быть
представлена в виде суммы касательной
и нормальной сил инерции (рис.1):
,
то сила инерции также может быть
представлена в виде суммы касательной
и нормальной сил инерции (рис.1):
![]() ,
,
где
![]()
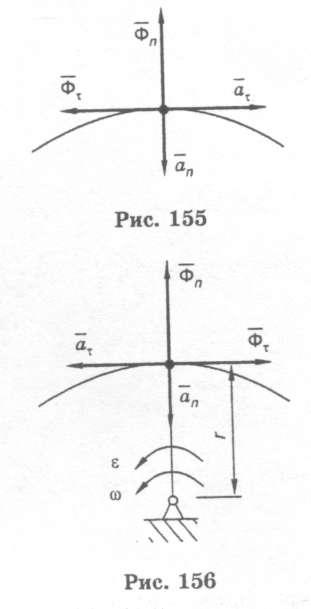
![]() и центробежная сила инерции
и центробежная сила инерции
![]() (рис. 2):
(рис. 2):
![]()
![]()
Если точка совершает сложное движение, то ее абсолютное ускорение равно сумме относительного, переносного и кориолисово ускорений:
![]()
Соответственно, можно ввести относительную, переносную и кориолисову силы инерции:
![]()
Рассмотрим движение
материальной точки в инерциальной
системе отсчета, которое может быть
описано основным уравнением динамики
![]() ,
где
,
где
![]() - равнодействующая активных сил, а
- равнодействующая активных сил, а
![]() - реакции связей, наложенных на точку.
- реакции связей, наложенных на точку.
Уравнение
![]() представляет собой уравнение движения,
записанное в форме уравнения статики,
поэтому такой метод и называется методом
кинетостатики
представляет собой уравнение движения,
записанное в форме уравнения статики,
поэтому такой метод и называется методом
кинетостатики
Формулировка принципа
Принцип Даламбера для материальной точки.
При движении материальной точки сумма равнодействующих активных сил, реакций связей и силы инерции всегда равна нулю.
4.Принцип Даламбера для несвободной механической системы.
Рассмотрим механическую систему, состоящую из п точек. Для каждой точки такой системы можно записать выражение принципа Даламбера:
![]()
где
![]() - сила инерции к-й
точки.
- сила инерции к-й
точки.
Просуммируем
теперь все эти уравнения и, введя
обозначения для главных векторов
активных сил
![]() ,
реакции связей
,
реакции связей
![]() и сил инерции
и сил инерции
![]() ,
получим уравнение:
,
получим уравнение:
![]()
Принцип Даламбера для механической системы (в записи для сил)
При движении механической системы сумма главных векторов активных сил, реакций связей и сил инерции всегда равна нулю.
Отметим очевидное: при суммировании всех действующих в системе сил из рассмотрения должны быть исключены внутренние силы, главный вектор которых всегда равен нулю.
Получим теперь
выражение принципа Даламбера в записи
для моментов сил. Взяв в пространстве
произвольную точку О, проведем из нее
радиус-векторы точек системы
![]() и, домножая уравнения на соответствующие
радиус-векторы, превратим силы в моменты
сил:
и, домножая уравнения на соответствующие
радиус-векторы, превратим силы в моменты
сил:
![]() или
или
![]()
Просуммируем
последние уравнения и введя обозначения
для главных моментов активных сил
![]() ,
реакций связей
,
реакций связей
![]() и сил инерции
и сил инерции
![]() ,
получим одно уравнение:
,
получим одно уравнение:
![]()
Принцип Даламбера для механической системы (в записи для моментов)
При движении механической системы сумма главных моментов активных сил, реакций связей и сил инерции относительно любой точки пространства всегда равна нулю.
Последние три уравнения содержат главные моменты активных сил, реакций связей и сил инерции относительно координатных осей.
Для того, чтобы успешно пользоваться принципом Даламбера при описании движения, нужно уметь вычислять главный момент сил инерции.
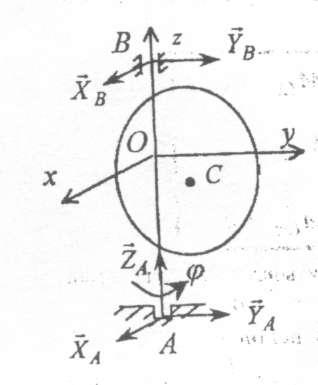
5. Динамические реакции при вращении твердого тела вокруг неподвижной оси
При движении несвободного твердого тела реакции связей складываются из статических и добавочных динамических составляющих
![]()
где
![]() - главный вектор статических реакций,
определяемых уравнениями статики,
- главный вектор статических реакций,
определяемых уравнениями статики,
![]() - главный вектор динамических реакций,
обусловленных движением механической
системы.
- главный вектор динамических реакций,
обусловленных движением механической
системы.
Динамические реакции можно определить с помощью принципа Даламбера

Здесь
![]() - главный вектор активных сил;
- главный вектор активных сил;
![]() - главные моменты активных сил, статических
и динамических реакций
- главные моменты активных сил, статических
и динамических реакций
![]()
![]()
в проекциях на оси координат получим уравнения для определения динамических реакций опор движущегося тела
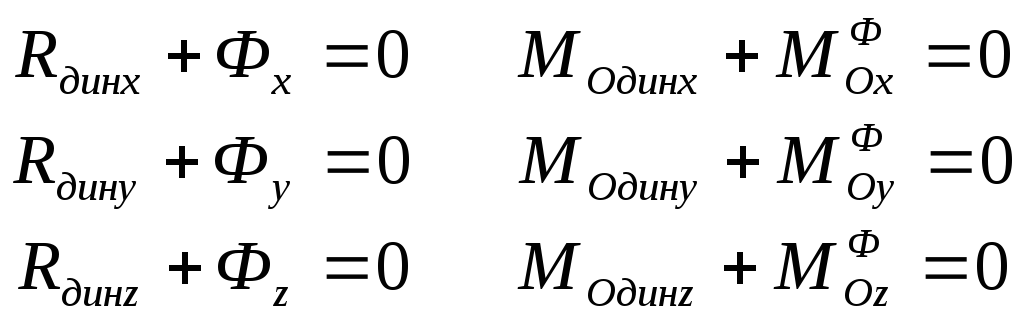
При составлении этих уравнений не нужно учитывать активные силы. Динамические реакции определяются только силами инерции.
При вращении
твердого тела массы т
вокруг
неподвижной оси Оz
главный вектор сил инерции равен
![]() .
В проекциях на оси координат, жестко
связанные с телом,
.
В проекциях на оси координат, жестко
связанные с телом,
![]()
![]()
![]()
С учетом выражений
для главного момента сил инерции и для
главного момента внешних сил и равенства
![]() находим
находим
![]()
![]()
![]()
Тогда уравнения для определения динамических реакций подшипников при вращении твердого тела вокруг неподвижной оси имеют вид:
![]()
![]()
![]()
![]()
![]()
Для того чтобы при вращении тела вокруг неподвижной оси не возникали динамические реакции, необходимо и достаточно, чтобы ось вращения была главной центральной осью инерции, тогда хс =0, ус =0, Jxz =0, Jyz =0 и динамических реакций не возникает
Ось вращения можно сделать главной центральной осью инерции, добавляя две точечные массы. Такой метод динамической балансировки широко используется для уравновешивания быстровращающихся деталей машин.