

Кинематический анализ рычажных механизмов методом векторных уравнений и их графическое решение в форме планов скоростей и ускорений.
Кинематическое исследование механизма состоит в изучении движения звеньев без учета сил, действующие на эти звенья, при заданном движении ведущего звена.
Кинематическими характеристиками механизма называются производные от функции положения по времени. Первая производная называется скоростью (обозначается V, ω), вторая - ускорением (обозначается a, ε).
Абсолютное движение – это движение точки или тела относительно неподвижной системы координат, связанной с неподвижной стойкой
Относительное движение – это движение точки или звена относительно подвижной системы координат, которая связана с каким-либо движущимся звеном. Движение подвижной системы координат называется переносным движением.
План положения -кинематическая схема механизма, вычерченная для заданного положения кривошипа в определенном масштабе.
Метод планов скоростей и ускорений основан на теореме о сложении движения, согласно которой «движение любой точки звена рассматривается как сложное, состоящее из двух движений: а) переносного вместе с одной из точек звена, выбранной за полюс в относительном движении и б) относительного вокруг выбранного полюса»
Балансировка роторов - понятие о неуравновешенности ротора, виды неуравновешенности роторов и способы их устранения.
Ротор -звенья механизмов, совершающие вращательное движение и удерживаемые при этом своими несущими поверхностями в опорах.
Если масса ротора распределена относительно оси вращения равномерно, то главная центральная ось инерции x-x совпадает с осью вращения и ротор является уравновешенным или идеальным. При несовпадении оси вращения с осью x-x, ротор будет неуравновешенным и в его опорах при вращении возникнут переменные реакции, вызванные действием инерционных сил и моментов (точнее, движением центра масс с ускорением). Различают следующие виды неуравновешенности роторов:
а) статическую, когда эти оси параллельны; б) моментную, когда оси пересекаются в центре масс ротора S; в) динамическую, когда оси либо пересекаются вне центра масс, либо не пересекаются, а перекрещиваются в пространстве.
а)При
вращении ротора возникает статический
дисбаланс Dcт.
Для устранения статической неуравновешенности
по линии действия Dcт устанавливают
корректирующую массу mk на
расстоянии еk от
оси вращения, и эта корректирующая масса
создает дисбаланс:![]() Для статического уравновешивания
необходимо, чтобы
Для статического уравновешивания
необходимо, чтобы![]() при этом можно задаться величиной mk и
определить еk ,
или задаться еk и
найти mk.
В результате уравновешивания главная
центральная ось инерции должна совпасть
с осью вращения.
при этом можно задаться величиной mk и
определить еk ,
или задаться еk и
найти mk.
В результате уравновешивания главная
центральная ось инерции должна совпасть
с осью вращения.
б)
Моментная неуравновешенность проявляется
только при вращении ротора (появляются
биения на опорах).Динамический момент,
возникающий при вращении ротора MД =
DД.lД
Для
устранения моментной неуравновешенности
выбирают в произвольном месте две
корректирующие плоскости. Выберем их
так, чтобы одна проходила через опору
А, другая – через опору В.![]() в
обоих плоскостях
в
обоих плоскостях![]() Для моментного уравновешивания необходимо
чтобы
Для моментного уравновешивания необходимо
чтобы![]() Таким образом, для устранения моментной
неуравновешенности необходимо иметь
две корректирующие массы, которые
размещают в 2-х корректирующих плоскостях.
Таким образом, для устранения моментной
неуравновешенности необходимо иметь
две корректирующие массы, которые
размещают в 2-х корректирующих плоскостях.
в) Динамическая неуравновешенность устраняется путем установки двух корректирующих масс в двух корректирующих плоскостях. При этом дисбалансы корректирующих масс в 1-ой и во 2-ой плоскостях неравны и непараллельны.
Статическая и динамическая уравновешенности механической системы.
Статическое
уравновешивание ротора
(вращающегося звена) – распределение
масс вращающегося звена, переводящее
его центр масс на ось вращения.Условие
статической уравновешенности ротора:

|
|
|
|
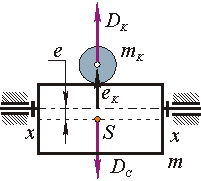
При статической неуравновешенности главная центральная ось инерции параллельны оси вращения ротора, главный вектор дисбалансов больше нуля, а главный момент дисбалансов равен нулю Dс > 0; MD = 0,т.е. необходимо уравновесить только вектор Dс= m e. Для этого достаточно установить на роторе только одну корректирующую массу mk, величина которой определяется из равенства Dk = mk ek = -Dc mk = Dk / ek , где величиной ek задаются из соображений удобства размещения противовесов. Направление вектора Dk противоположно направлению Dc.
Динамическим
уравновешиванием ротора
– распределение масс вращающегося
звена, совмещающее его ось вращения с
одной из главных осей инерции. Условие
динамической уравновешенности ротора:


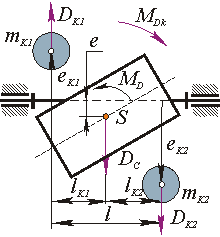
При динамической неуравновешенности главная центральная ось инерции пересекает ось вращения не в центре масс ротора точке S, либо перекрещивается с ней; и главный вектор дисбалансов Dc, и главный момент дисбалансов МD не равны нулю, т.е. необходимо уравновесить вектор Dс и момент дисбалансов МD . Для этого достаточно разместить на роторе две корректирующих массы mk1 и mk2 на расстояниях от оси вращения ek1 и ek2 , а от центра масс S, соответственно на lk1 и lk2. Массы выбираются и размещаются так, чтобы момент их дисбалансов MDk был по величине равен, а по направлению противоположен моменту дисбалансов ротора МD:
 ;
;
 ,
Dk
=
mk
ek .
,
Dk
=
mk
ek .

 а
векторная сумма дисбалансов была равна
и противоположно направлена вектору
Dc.
B этих
зависимостях величинами lki
и eki
задаются
по условиям удобства размещения
противовесов на роторе, а величины
mki
рассчитывают.
а
векторная сумма дисбалансов была равна
и противоположно направлена вектору
Dc.
B этих
зависимостях величинами lki
и eki
задаются
по условиям удобства размещения
противовесов на роторе, а величины
mki
рассчитывают.