

2. Ознакомление с принципами построения функциональных моделей спд в среде matlab
2.1. Быстрое соединение блоков
Если требуется соединить верхний свободный выход первого элемента с верхним свободным входом второго, то для ускорения процесса нужно:
Выделить первый блок нажатием на нем левой кнопки мыши;
Нажать и удерживать клавишу Ctrl;
Нажать левой кнопкой мыши на втором блоке;
Отпустить клавишу Ctrl.
2.2. Изменение числа входов блока просмотра временных диаграмм Scope
Двойным щелчком на блоке открыть окно просмотра временных диаграмм;
Нажать левой кнопкой мыши кнопку настроек
 ;
;Установить требуемое число входов блока в поле с названием «Numberofaxes»;
Нажать кнопку «OK»;
Закрыть окно просмотра временных диаграмм.
2.3. Уменьшение числа входов (выходов) подсистем
Двойным щелчком на блоке подсистемы откроется структура подсистемы;
Выделите лишние входы (выходы);
Нажмите клавишу «Delete»;
Закройте окно подсистемы.
2.4. Увеличение числа входов (выходов) подсистем
Двойным щелчком на блоке подсистемы откроется структура подсистемы;
Выделите один вход (выход);
Наведите указатель мыши на этот вход;
Нажмите и держите правую клавишу мыши;
Сместите указатель мыши на свободное место в окне подсистемы;
Отпустите правую клавишу мыши;
Во всплывшем окне выберите пункт «Copyhere» (при копировании выходов подсистемы всплывающее окно не появляется);
Закройте окно подсистемы.
3. Ознакомление с модифицируемой структурой базовой функциональной модели СПД
Целью данного пункта является изучение базовой структуры функциональной модели СПД, использующей ЦСК, в которой вам необходимо адаптировать модели отдельных узлов с учетом индивидуального задания.
3.1. Ознакомления со структурной схемой базовой модели СПД
Базовая функциональная модель СПД, использующей циклический систематический код с параметрами (7, 4, 3) приведена на рис.3.1
Проект MATLAB, содержащий функциональную модель находится в файлеC:\ПДИУС\АТ\Лаб3\LabCsk.mdl. Требуется скопировать этот файл (не открывая) в папкуE:\ПДИУС\АТ\Лаб3\***\LabCsk.mdl, где *** отражает название вашей группы и номер подгруппы, записанные латинскими буквами (напримерАТ-04-1(2)). Все изменения структуры проекта разрешается производить только вКОПИИ.
Запустите из среды MATLABскопированный файл.
Структурная схема модели проекта представлена на рисунке 3.1.
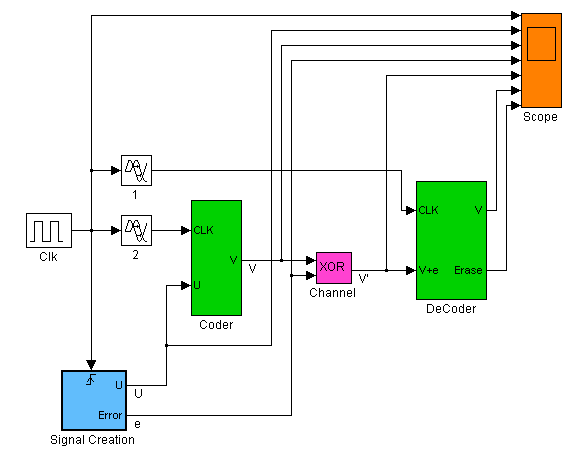
Рис 3.1. Структурная схема функциональной модели СПД
Модель предназначена для проведения процессов кодирования информации, передачи информации по каналу связи в условии помех и декодирования информации на приемной стороне. В рамках данной лабораторной работы рассматриваются процессы кодирования и декодирования циклических БЧХ кодов.
Данная модель реализует возможность однократной передачи информации, т.е. одно информационное сообщение кодируется, передается и декодируется один раз. Для повторной передачи будет необходимо заново запустить процесс моделирования.
Определим функциональное назначение блоков базовой модели:
Coder– Подсистема кодера БЧХ кода поg(x);
DeCoder– Подсистема декодера БЧХ кода;
Signal Generator– Блок выработки информационного вектора и вектора ошибки;
Channel – Блок внесения ошибки в канале связи;
CLK– Генератор тактовой частоты, период одного такта 1 секMATLAB;
Scope (здесь и далее)– Блок просмотра временных диаграмм;
1,2– Служебные блоки.
В рамках лабораторной работы будет применяться аддитивная модель канала связи. с независимыми ошибками, тогда:
![]()
Блок Channelпредставляет собой логическое преобразование – сложение двух логических сигналов «по модулю два» («исключающее ИЛИ»). В системе к передаваемому вектору добавляется вектор ошибки. Этот процесс имитирует аддитивную модель канала связи, т.е. при передаче кодового вектора по каналу связи происходит искажение тех разрядов кодового вектора, где в соответствующих позициях вектора ошибки стоят единицы.