

1.3 Силовые электронные устройства
Использование усилителей в системах автоматики вызвано тем, что обычно, электрические сигналы (напряжения и токи), поступающие в электронные устройства контроля, управления и преобразования, малы по амплитуде и возникает необходимость увеличивать их до требуемой величины, достаточной для дальнейшего использования (преобразования, передачи, подачи на нагрузку).
Силовые электронные устройства, применяемые в системах автоматического управления, преобразуют энергию источников питания в энергию управляющего воздействия, подаваемого на объект управления. Таким образом, под силовыми электронными устройствами понимается группа устройств, предназначенных для получения электрического управляющего воздействия требуемой мощности.
В силовых электронных устройствах можно выделить две основные части - силовые элементы (СЭ) и управляющую схему (УС) (рис. 1.7). Силовые элементы служат для управления энергией, поступающей от источника питания (ИП). В качестве таких элементов могут использоваться мощные транзисторы, тиристоры, оптосимисторы и т. д.
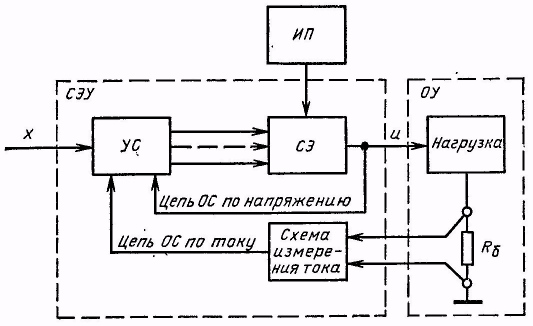
Рисунок 1.7 — Обобщенная схема силового электронного устройства
Управляющая схема выполняет функцию преобразования входного сигнала в сигналы, необходимые для управления силовыми элементами. В силовом электронном устройстве (СЭУ) можно применять обратную связь (ОС) по току или напряжению, что в общем случае позволит уменьшить погрешности формирования управляющего воздействия. Если реализуется обратная связь по току, в силовое устройство, вводится схема измерения тока.
Типы силовых электронных устройств
1) усилители мощности, в которых ток или напряжение управляющего воздействия сохраняют вид входного сигнала;
2) регуляторы мощности, в которых обеспечивается соответствие среднего значения мощности формируемого управляющего воздействия значению входного сигнала.
Управляющая схема усилителя мощности может быть реализована на операционном усилителе DA1 (рис. 1.8), на транзисторах VT1, VT2 реализован выходной каскад.

Рисунок 1.8 — Электрическая схема усилителя мощности
Между управляющей схемой и выходными каскадами усилителей мощности часто требуется необходимость гальванической развязки. Гальваническая развязка практически полностью исключает влияние выходных каскадов на формирование управляющего воздействия (переходные процессы, возникающие при коммутации мощных нагрузок, приводят к появлению бросков тока и напряжения, которые могут изменять закон формирования управляющего сигнала, либо вызывать ложные срабатывания).
С целью разделения входных и выходных цепей используют оптроны — полупроводниковые приборы, в которых находятся излучатель света, управляемый входным током, и фотоприемник, расположенные в общем корпусе. Через оптрон возможна только прямая передачи сигнала, поскольку его входная и выходная цепи полностью изолированы.
В отличие от разделительного конденсатора оптрон в качестве элемента связи обеспечивает передачу сигнала вплоть до нулевой частоты, т. е. постоянного (условно) напряжения. Изолирующая способность оптрона очень велика, поскольку его работоспособность сохраняется при высоком напряжении между входом и выходом (порядка десятков киловольт) в диапазоне частот от 0 до 10 ... 100 МГц и выше.
Регуляторы осуществляют преобразования входных сигналов. Под влиянием входных сигналов (управления или возмущения) изменяются регулируемые переменные. Цель регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались бы от требуемых значений.
Регуляторы делятся по закону регулирования, наиболее часто применяется двухпозиционное регулирование и ПИД-регулирование (пропорционально-интегрально-дифференциальное).
Двухпозиционные регуляторы нашли широкое распространение, благодаря своей простоте и малой стоимости. Двухпозиционное регулирование обеспечивает включение или отключение исполнительного устройства (например, нагревателя) в зависимости от того, ниже или выше измеренный параметр относительно заданного уровня. При двухпозиционном регулировании в системе всегда присутствуют колебания технологического параметра, причем размах этих колебаний определяется только параметрами системы (инерционностью датчиков, исполнительного устройства и самой системы) и практически не зависит от регулятора.
ПИД - регуляторы
Пропорциональный П-регулятор осуществляет пропорциональное преобразование входного сигнала с коэффициентом k. В табл. 1.1 показан характер изменения во времени выходного сигнала П-регулятора при подаче на него ступенчатого входного сигнала в момент времени t0. Как видно, выходной сигнал такого регулятора повторяет входной с коэффициентом преобразования К.
Интегральный И-регулятор (вторая строка табл. 1.1) получают включением в цепь обратной связи ОУ конденсатора Сос, а во входную цепь - резистор R1. В результате этого регулятор приобретает свойства интегрирующего устройства и напряжение на его выходе определяется интегралом от входного сигнала.
Дифференциальный Д-регулятор - обеспечивает дифференцирование входного сигнала с коэффициентом T= RосC1. Переходная характеристика идеального Д-регулятора представляет собой электрический импульс бесконечно большой амплитуды и малой длительности.
Таблица 1.1 – Схемная реализация регуляторов и их функции

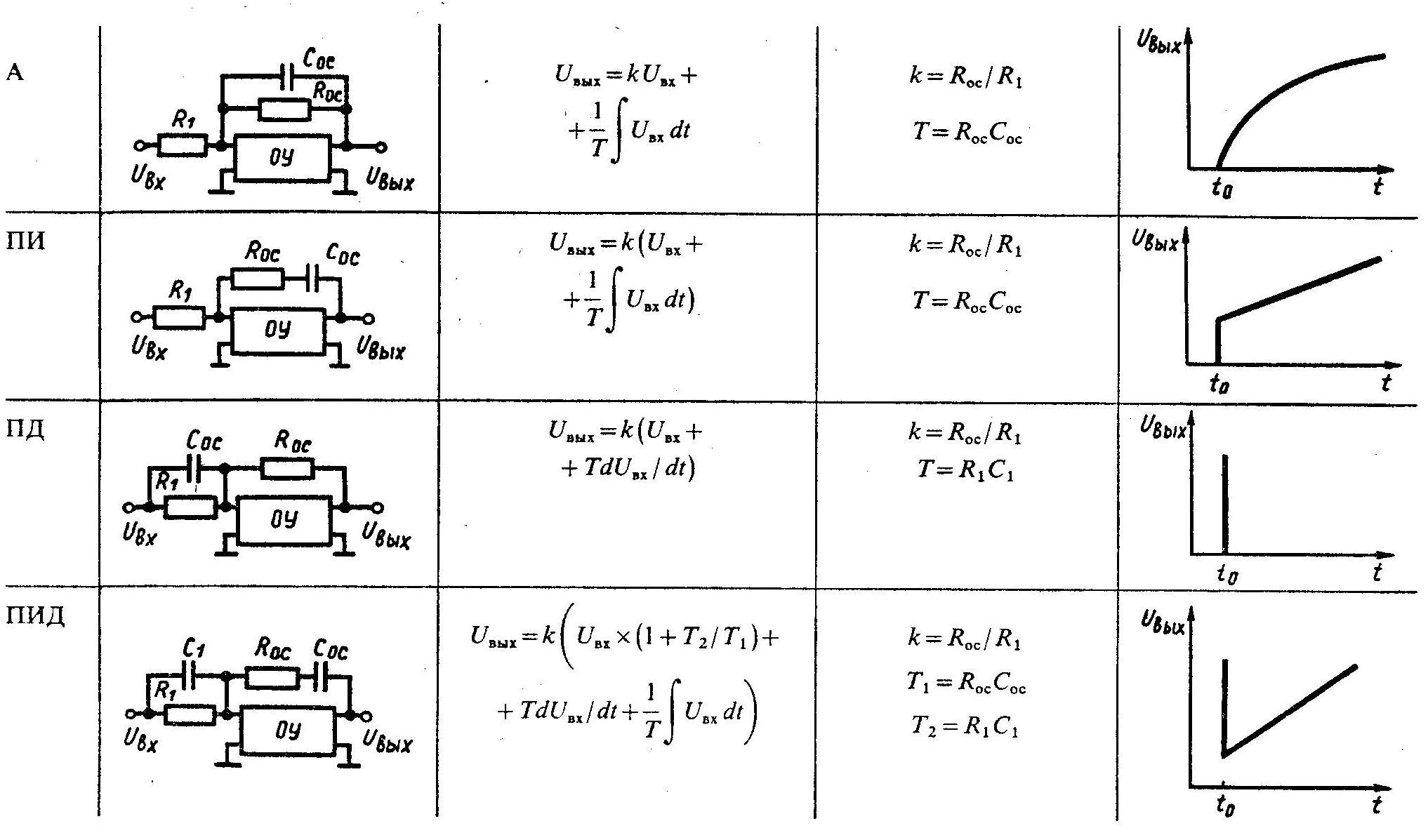
Схемы и характеристики других регуляторов ПИ-, ПД-, ПИД- осуществляют комплексное преобразование входных сигналов.
При ПИД регулировании сигнал управления зависит от разницы между измеренным параметром и заданным значением, от интеграла от разности и от скорости изменения параметров. В результате ПИД-регулятор обеспечивает такое состояние исполнительного устройства (промежуточное между включен или выключен), при котором регулируемый параметр равен заданному.
Частным случаем регулятора мощности являются регуляторы хода. В системах с электроприводом требуется управлять электродвигателями - их нужно включать, менять их обороты и останавливать, то есть электродвигателям требуется отдельное устройство, которое называется регулятором хода.
Широко применяются импульсные регуляторы с широтно-импульсным регулированием. Регулятор хода включается между источником питания и силовым электродвигателем. В простейшем случае в задачу регулятора входит регулирование потока мощности от источника к двигателю. При минимальной длительности импульсов двигатель выключен, при максимальной - двигатель развивает максимальную мощность. В промежутке мощность плавно изменяется.
Регуляторы хода можно разделить на два типа - для коллекторных двигателей и для бесколлекторных двигателей. Рассмотрим типовую схему включения регулятора коллекторного электродвигателя (рис. 1.9):
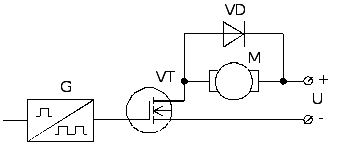
Рисунок 1.9 — Схема включения регулятора коллекторного электродвигателя
Управляющий импульс поступает на генератор импульсов G, который вырабатывает импульсы различной длительности – широтно-импульсная модуляция:
- при длительности выходного импульса 0% от периода управляющего сигнала нет, на затворе низкий уровень напряжения - транзистор закрыт, ток через двигатель М не течет;
- при длительности выходного импульса 100% от периода на выходе генератора тоже импульсов нет, но уровень управляющего сигнала высокий. Транзистор открыт и все напряжение от источника U приложено к двигателю М. Он развивает при этом максимальную мощность.
- при промежуточном значении длительности управляющего импульса, например половине от максимального, на выходе генератора присутствуют импульсы, длительность которых составляет половину периода. Соответственно, транзистор половину периода открыт, половину - закрыт.
Когда ключ закрывается, ток не прекращает свое движение и схема выглядит так (рис. 1.10):


Рисунок 1.10 — Пути протекания тока при работе коллекторного электродвигателя
Т.е., ток через двигатель продолжает течь в прежнем направлении. Источником энергии для него служит магнитное поле индуктивности, а диод - замыкает цепь в паузе, когда транзистор закрыт.
Обычно, помимо управления оборотами, регуляторы обеспечивают дополнительные функции:
Тормоз — осуществляется путем замыкания обмоток двигателя через регулятор. Иногда реализуется функция "мягкого" тормоза, когда обмотки замыкаются не сразу, а небольшими импульсами. Это позволяет уменьшить нагрев регулятора и продлить жизнь коллектора электродвигателя.
Реверс — способность менять направление вращения электродвигателя, подавая на него напряжение в обратной полярности.
Для управления двигателями переменного тока используют преобразователи частоты (инверторы). Основное назначение — плавное регулирование скорости асинхронного двигателя за счет создания на выходе преобразователя трехфазного напряжения переменной частоты.
На рисунке 1.11 представлена схема частотного преобразователя. Транзисторы работают в ключевом режиме попарно (один верхний, другой нижний), открываясь с частой, задаваемой схемой управления. В схеме используется широтно-импульсное управление, позволяющее создать в обмотках статора электродвигателя синусоидальный ток необходимой частоты и амплитуды.

Рисунок 1.11 — Схема частотного преобразователя
Д омашнее
задание
омашнее
задание
1) Поясните работу реверсивного регулятора хода. Какие функции может выполнять данная схема?

2) Поясните работу схемы регулятора температуры.