

-
Аналітичні умови рівноваги систем збіжних сил
В основу аналітичних умов рівноваги систем сил покладено поняття проекції вектора на вісь.
Оберемо декартову прямокутну систему
координат Oxyz, в якій
розташована система збіжних сил
![]() (рис. 1.12), і спроектуємо на осі Ox,
Oy і Oz
вектори, що знаходяться в правій і лівій
частинах рівняння (1.4).
(рис. 1.12), і спроектуємо на осі Ox,
Oy і Oz
вектори, що знаходяться в правій і лівій
частинах рівняння (1.4).
-
 ;
;
 ,
,

(1.6)
Тут
![]() - проекції рівнодіючої на координатні
осі х, у, z;
- проекції рівнодіючої на координатні
осі х, у, z;
![]() - проекції сили
- проекції сили
![]() на ті ж осі.
на ті ж осі.
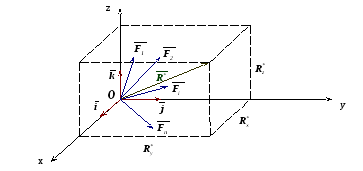
Рис. 1.12
Рівність нулю вектора рівнодіючої
![]() можлива тільки тоді, коли кожна з її
проекцій на координатні осі буде
дорівнювати нулю, тобто
можлива тільки тоді, коли кожна з її
проекцій на координатні осі буде
дорівнювати нулю, тобто
![]() .
З цього виходить, що і праві частини
рівнянь (1.6) повинні дорівнювати нулю:
.
З цього виходить, що і праві частини
рівнянь (1.6) повинні дорівнювати нулю:
-
 ;
;
 ,
,
 .
. (1.7)
Отже, для рівноваги просторової системи збіжних сил, прикладених до матеріальної точки або твердого тіла, необхідно і досить, щоб алгебраїчні суми проекцій всіх сил цієї системи на три взаємно перпендикулярні осі були рівними нулю.
Очевидно, що для рівноваги плоскої системи збіжних сил, розташованих, наприклад, в площині хОу, будемо мати тільки два рівняння:
-
 ;
;
 .
.(1.8)
Умови рівноваги (1.7) і (1.8) називають також рівняннями рівноваги, так як вони дозволяють знаходити і невідомі сили, що зрівноважують задані. Потрібно мати на увазі, що кількість невідомих сил не повинна перевищувати кількість рівнянь рівноваги. У противному випадку задача стає статично невизначеною, і розв’язати її методами статики абсолютно твердого тіла неможливо.
-
Теорема Варіньона (терема про момент рівнодіючої збіжної системи сил)
Момент рівнодіючої системи збіжних сил відносно довільного просторового центра дорівнює векторній сумі моментів сил складових відносно того ж центра.
Розглянемо просторову систему збіжних
сил
![]() ,
лінії дії яких перетинаються в точці С
(рис.1.13)
,
лінії дії яких перетинаються в точці С
(рис.1.13)
З довільно обраного моментного центра
А проведемо до точки сходу С радіус-вектор
![]() і підсумуємо моменти кожної сили
відносно центра А:
і підсумуємо моменти кожної сили
відносно центра А:
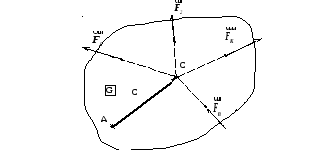
Рис.1.13
![]() .
.
Але
![]() і
тому
і
тому
![]() ,
або
,
або
![]() ,
що і потрібно було довести.
,
що і потрібно було довести.
Теорема Варіньона справедлива не тільки для систем збіжних сил, вона узагальнюється і на будь-яку систему сил, що зводиться до рівнодіючої.
Для плоскої системи збіжних сил теорема формулюється так: момент рівнодіючої відносно точки площини, де розташована система сил, дорівнює алгебраїчній сумі моментів складових відносно тієї ж точки. Тобто:
![]() . (1.9)
. (1.9)
Приклад практичного використання теореми Варіньона
Визначити моменти сил
![]() і
і
![]() ,
які розташовані в площині xAy,
відносно точок А, В, D
плоскої рамної конструкції АВСD,
якщо відомі кути α, β і розміри а,b,c
елементів рами.
,
які розташовані в площині xAy,
відносно точок А, В, D
плоскої рамної конструкції АВСD,
якщо відомі кути α, β і розміри а,b,c
елементів рами.
Розв'язок.
Розкладемо сили
![]() і
і
![]() на
складові, напрямлені вздовж координатних
осей x і y.
Модулі проекцій сил будуть:
на
складові, напрямлені вздовж координатних
осей x і y.
Модулі проекцій сил будуть:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Згідно з теоремою Варіньона для моментів
сили
![]() відносно точок А, B
і D справедливі
рівняння:
відносно точок А, B
і D справедливі
рівняння:
-

(1)

(2)

(3)

Проаналізуємо ці рівняння. Оскільки
лінії дії складових сили
![]() перетинають моментну точку А (як і лінія
дії самої сили
перетинають моментну точку А (як і лінія
дії самої сили
![]() ),
то
),
то
![]() і момент сили
і момент сили
![]() відносно точки А
відносно точки А
![]() .
.
Якщо за моментну точку взяти точку В, -
рівняння (2) -, то складова сили
![]() перетинає цю точку і
перетинає цю точку і
![]() .а
.а
![]() .
Таким чином
.
Таким чином
![]() .
.
Для моментної точки D
(рівняння 3)
![]() ,
,
![]() ,
тому
,
тому
![]() .
.
Пропонується моменти сили
![]() відносно точок А, В, D
визначити самостійно.
відносно точок А, В, D
визначити самостійно.