

Точность при типовых воздействиях
Т![]() очность
работы САР в установившемся режиме
оценивается по величине установившейся
ошибки
очность
работы САР в установившемся режиме
оценивается по величине установившейся
ошибки
при типовых возмущающих воздействиях. Чем меньше уст, тем выше качество САР.
У![]() становившаяся
ошибка может быть определена по известным
передаточным функциям системы
становившаяся
ошибка может быть определена по известным
передаточным функциям системы
г![]() де:
де:
п![]() ередаточная
функция замкнутой системы по ошибке.
ередаточная
функция замкнутой системы по ошибке.
передаточная функция замкнутой системы по возмущению.
У![]()
![]() становившаяся
ошибка находится по теореме о конечном
значении:
становившаяся
ошибка находится по теореме о конечном
значении:
![]()
![]()
Постоянное ступенчатое воздействие
П![]() усть
действует одно возмущающее воздействие
усть
действует одно возмущающее воздействие
г![]()
 де
f0
– const
де
f0
– const
где g0 – const
П![]() ервое
слагаемое отлично от 0 только в статических
системах, где W(0)=k
k–
общий коэффициент усиления разомкнутой
системы. Тогда
ервое
слагаемое отлично от 0 только в статических
системах, где W(0)=k
k–
общий коэффициент усиления разомкнутой
системы. Тогда
Д![]() ля
системы статической по возмущению f(t)
ля
системы статической по возмущению f(t)
Если система оказывается астатической по отношению к входному воздействию W(0)=, то это ещё не означает, что астатизм системы сохраняется и по отношению к возмущению.
В![]()
![]() оздействие
в виде линейной функции
g(t)=1*t
и f(t)=f0*1(t).
оздействие
в виде линейной функции
g(t)=1*t
и f(t)=f0*1(t).
Этот режим применяется главным образом в следящих системах. Так как
з апишем
апишем
Второе слагаемое неизменно.
Первое слагаемое имеет смысл только для систем с астатизмом первого порядка по отношению к входному воздействию, т.е. когда
![]()
где W0(0)=k1 , W/0(0)=1
Эта составляющая ошибки называется скоростной. Она равна отношению скорости входного воздействия к добротности системы по скорости k1 дс=1/k1.
Качество системы считается тем выше, чем выше добротность системы. В статических системах дс=, а при астатизме выше первого порядка дс=0.
Воздействие
в виде квадратичной функции
![]()
В озмущение
как и ранее
f(t)=g0*1(t).
Этот режим имеет смысл только для
следящих систем и систем программного
управления, обладающих астатизмом
первого порядка. Он соответствует
движению командной оси СС с постоянным
озмущение
как и ранее
f(t)=g0*1(t).
Этот режим имеет смысл только для
следящих систем и систем программного
управления, обладающих астатизмом
первого порядка. Он соответствует
движению командной оси СС с постоянным
ускорением a=const
Второе слагаемое, как и раньше, даёт статическую ошибку. Первое слагаемое имеет смысл только при астотизме второго порядка, когда передаточная функция разомкнутой системы может быть представлена в виде:
W(s)=![]()
где k2=W0(0), W/0(0)=1
Первая составляющая уст называется ошибкой от ускорения ду=1/k2 .
Качество системы считается тем выше, чем больше добротность системы по ускорению k2.
Гармоническое (синусоидальное) воздействие g(t)=gmaxSingt
Р![]() ассмотрим
ошибку только от входного воздействия.
ассмотрим
ошибку только от входного воздействия.
О![]() чевидно,
что ошибка в установившемся режиме
будет меняться по гармоническому закону
с той же частотой g
. Амплитуда
(максимальное значение) ошибки может
быть определено
чевидно,
что ошибка в установившемся режиме
будет меняться по гармоническому закону
с той же частотой g
. Амплитуда
(максимальное значение) ошибки может
быть определено
О![]() бычно
gmax>max,
поэтому модуль знаменателя можно считать
значительно больше 1 и
бычно
gmax>max,
поэтому модуль знаменателя можно считать
значительно больше 1 и
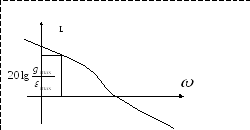
где W(jg) - значение АЧХ разомкнутой системы на частоте g.
О![]()
![]() тсюда
легко вытекает требование к АЧХ
разомкнутой системы, при котором
обеспечивается нужная точность
управления:
тсюда
легко вытекает требование к АЧХ
разомкнутой системы, при котором
обеспечивается нужная точность
управления:
Полученное выражение ограничивает местоположение ЛАЧХ требованиями по точности.
Оценка запаса устойчивости и быстродействия по кривой процесса регулирования.
Оценка качества САР по виду кривой переходного процесса производится при помощи так называемых прямых показателей качества – перерегулирования, допустимого числа колебаний и времени переходного процесса. Обычно рассматривается переходной процесс, возникающий в системе при воздействии 1(t), т.е. переходная функция системы.
Запас устойчивости системы, под которым понимается степень удалённости САР от колебательной границы устойчивости, характеризуется перерегулированием
=(hmax-hуст)/hуст, где hmax – максимальное значение h функции, hуст – установившееся значение переходной функции.












 h(t)
h(t)



 hуст
hуст





 hmax
hmax


 t
t




tп
Перерегулирование обычно выражается в процентах.
Для большинства систем запас устойчивости считается достаточным, если (10-30)%. Однако, в некоторых САР допускается перерегулирование до 70%, а в ряде случаев оно должно вообще отсутствовать.
Иногда ограничивается число колебаний относительно установившегося значения.
Время переходного процесса определяет быстродействие системы. Под ним понимается промежуток времени, по истечению которого выполняется неравенство h(t)-hуст; =0,01 – 0,05.
Оценки качества по кривой переходного процесса обладают большой наглядностью. Но для их определения необходимо иметь решения дифференциальных уравнений. Однако это трудно. В связи с этим особое значение приобрели различные приближённые и косвенные методы оценки качества процессов управления, не требующие построения кривой переходного процесса.