

2.4. Регулирование положения электроприводов
Необходимость регулирования положения исполнительных органов в пространстве или, как еще говорят, их позиционирования возникает для многих рабочих машин и механизмов. К ним относятся подъемно-транспортные машины, механизмы подач станков, роботы и манипуляторы, графопостроители, клапаны, задвижки и т. д.
Как и при регулировании остальных координат движения исполнительных органов, эта задача решается путем регулирования положения вала электродвигателя в разомкнутых и замкнутых системах. Основное требование, которое предъявляется к электроприводу таких исполнительных органов, заключается в обеспечении требуемой точности их установки в заданную точку пространства или плоскости, а в ряде случаев – и в обеспечении требуемого характера их движения.
В простейших, разомкнутых электроприводах регулирование положения обычно обеспечивается с помощью путевых или конечных выключателей. Эти выключатели устанавливаются в нужную точку пространства (плоскости) и производят отключение электропривода от источника питания. Исполнительный орган тормозится и с некоторой точностью останавливается. Такой способ регулирования положения применяется, например, в электроприводе лифтов при останове кабины Его характерные особенности – простота реализации и невысокая точность.
При необходимости получения высокой точности регулирования положения и обеспечения качественного характера движения исполнительного органа используется замкнутый электропривод с обратной связью по положению. В этом случае система автоматически вырабатывает сигнал на начало торможения и обеспечивает заданную точность останова исполнительного органа.
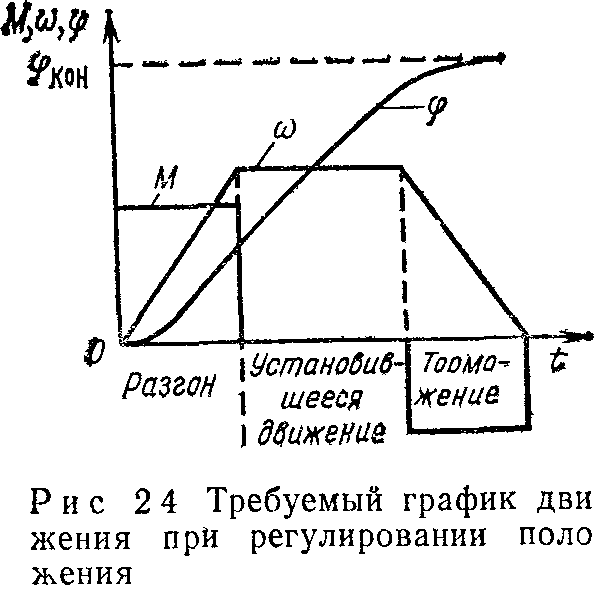
На рис. 2.4 показан идеализированный
рациональный график движения электропривода
при отработке единичного перемещения
(шага) исполнительного органа. Этот
график имеет в общем случае три
участка–разгон, установившееся движение
и торможение. В конечной точке, когда
![]() =
=![]() кон,
скорость движения
кон,
скорость движения
![]() и его момент М равны нулю, что
соответствует состоянию покоя
исполнительного органа Реальные графики
движения электропривода в той или иной
степени приближаются к этому
идеализированному графику. Регулирование
положения чаще всего требуется при
реализации следящего и программно-управляемого
движения исполнительного органа.
и его момент М равны нулю, что
соответствует состоянию покоя
исполнительного органа Реальные графики
движения электропривода в той или иной
степени приближаются к этому
идеализированному графику. Регулирование
положения чаще всего требуется при
реализации следящего и программно-управляемого
движения исполнительного органа.
2.5. Режимы работы электроприводов
Электрический привод может работать в одном из двух режимов – установившемся или переходном.
Установившийся режим характеризуется тем, что все механические координаты (переменные) электропривода не изменяются во времени. Математическим условием установившегося режима является равенство нулю всех производных механических координат. Частным случаем установившегося режима является состояние покоя, когда все координаты и их производные равны нулю. К установившемуся режиму электропривода относится его движение с постоянной скоростью.
Переходный (или динамический) режим имеет место, когда хотя бы одна из производных механических координат электропривода отлична от нуля. Эти режимы описываются дифференциальными уравнениями, решение (интегрирование) которых позволяет получить зависимость изменения координат электропривода во времени. Переходный режим имеет, место при переходе электропривода из одного установившегося режима в другой. Исследование переходных режимов (процессов) составляет одну из важнейших задач теории электропривода. Переходные процессы возникают в результате воздействия на электропривод различных возмущений – сигналов управления, момента или усилия нагрузки, а также различных случайных факторов. Типовыми переходными процессами для электропривода являются пуск, реверс, торможение, сброс и наброс нагрузки, регулирование скорости.
Основной целью рассмотрения переходных процессов является определение зависимости изменения во времени тока, момента, скорости, угла поворота вала двигателя. Нахождение этих зависимостей имеет большое практическое значение, так как они позволяют определить соответствие динамических характеристик электропривода требованиям технологического процесса, оценить допустимость возникающих в динамике тока и момента двигателя, определить правильность выбора двигателя и аппаратуры управления, рассчитать потери энергии и т. д. Особую важность этот расчет имеет для электроприводов тех рабочих машин, для которых переходный режим является основным рабочим режимом. К числу таких машин относятся реверсивные прокатные станы, рольганги, прессы и молоты, поршневые компрессоры и ряд других.
Физическая причина наличия переходных процессов заключается в способности элементов электропривода накапливать и отдавать энергию–механическую, электромагнитную и тепловую. Поскольку процессы накопления и отдачи протекают не мгновенно, а постепенно в течение определенного времени, то изменение ЭДС, тока, момента, скорости, угла поворота отличается инерционностью.
В зависимости от вида накапливаемой и отдаваемой энергии в электроприводе различают механические, электромагнитные и тепловые переходные процессы, которые взаимосвязаны между собой. В большинстве практических случаев тепловые процессы протекают существенно медленнее механических и электромагнитных и не оказывают на них заметного влияния. Поэтому обычно в теории электропривода они рассматриваются отдельно, за исключением специальных случаев. В свою очередь, механическая и электромагнитная инерционность элементов реального электропривода могут существенно различаться. В тех случаях, когда механическая инерционность существенно превышает электромагнитную, последнюю обычно не учитывают, и в этом случае переходные процессы называют механическими. Примерами механических переходных процессов являются процессы, рассмотренные в § 1.5–1.7.
При сопоставимых механической и электромагнитной инерционностях электропривода имеют место электромеханические переходные процессы. Строго говоря, все переходные процессы в электроприводе, являющемся электромеханической системой, представляют собой электромеханические процессы, и выделение механических переходных процессов в отдельный класс – есть определенная идеализация.
Электромагнитные переходные процессы характерны для цепей обмоток двигателя.
Условное разделение переходных процессов проведем, обратившись к рис. 2.5. На нем все электрические элементы электропривода объединены в электрическую часть электропривода ЭЧЭП, а механические–в механическую часть МЧЭП. К электрической части отнесем все элементы системы управления и электрическую часть двигателя (его обмотки), а к механической – все элементы, участвующие в механическом движении, в том числе и ротор двигателя.
![]()
Введем теперь в рассмотрение некоторую обобщенную электромагнитную постоянную времени Тэ, характеризующую инерционность электрической части электропривода, и электромеханическую постоянную времени Тм, которая является мерой инерционности механической части электропривода. Постоянная времени Тэ характеризует инерционность обмоток двигателя и элементов силового преобразователя и схемы управления.
Если Тм>>Тэ, то переходные процессы условно относят к классу механических; если Тм сопоставима с Тэ, то имеют место электромеханические переходные процессы.
Для построения графиков изменения во времени координат электропривода должны быть предварительно известны следующие исходные данные:
1) вид рассматриваемого переходного процесса (пуск, торможение, реверс, переход с характеристики на характеристику, сброс или наброс нагрузки);
2) начальные и конечные значения тока, момента, скорости и других координат. Эти данные определяются с помощью статических характеристик, на которых находятся начальная и конечная точки переходного процесса;
3) параметры электропривода, к числу которых относятся коэффициенты усиления (передачи) элементов и их постоянные времени. Эти данные определяются конструкцией элементов и их характеристиками.
Без наличия этих данных задача анализа переходных процессов является неопределенной.