-
Основи розрахунку напрямних прямолінійного руху
Навантаження, що діють на деталі напрямних, завжди можуть бути зведені до сили F, прикладеної у центрі робочої поверхні напрямної, і до моменту М, що діє у поздовжній площині напрямної. Розподіл тиску по ширині плоскої напрямної беруть рівномірним, а по довжині – таким, що змінюється за лінійним законом. Такі допущення можливі через малу ширину напрямних порівняно з їхньою довжиною і достатню жорсткість та точність виготовлення.
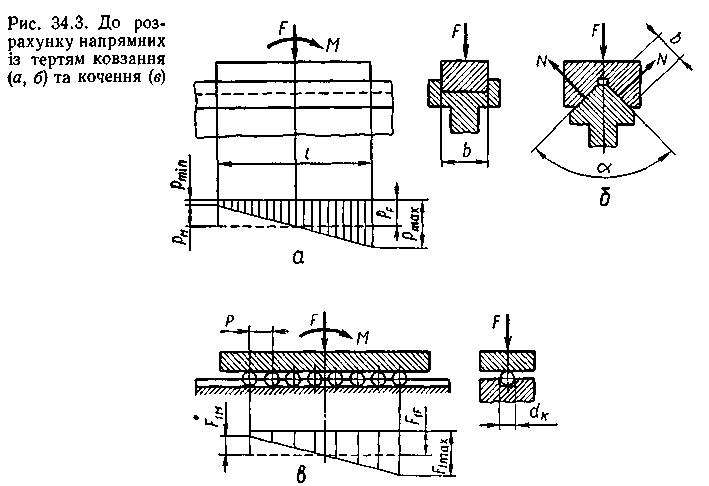
Стійкість проти спрацювання робочих поверхонь напрямної із тертям ковзання (рис. 34.3, а) перевіряють за умовою збереження шару мастила у зоні максимального тиску рmax. Епюра розподілу тиску по довжині l напрямної, навантаженої силою F та моментом М, показана на рис. 34.3, а. Для даного випадку навантаження напрямної умова стійкості проти спрацювання робочих поверхонь може бути записана у вигляді
pmах = pF + pм = F/(bl) + 6M/(bl)2 ≤ [ρ]. (1)
Нерозкриття стику робочих поверхонь напрямної забезпечується при виконанні умови
Pmin = pF – pм = F/(bl) – 6M/(bl)2) > 0. (2)
Для клинчастих напрямних (рис. 34.3, б) навантаження на поверхню контакту визначається за умовою F = 2N sin (α/2), звідки N = 0,5F/sin (α/2).
Відповідно умови обмеження максимального та мінімального тиску на робочих поверхнях клинчастої напрямної можна подати у такому вигляді:
pmax = 0,5 [F/(bl) + 6M/(bl2)]/sin (α/2) ≤ [p], ( 3)
pmin = 0,5 [F/(bl) – 6M/(bl2)]/sin (α/2) > 0. (4)
Допустимий тиск на робочих поверхнях напрямних ковзання при досить повільних переміщеннях (v < 0,05м/с) беруть [р] = (2... 3)МПа, а при підви–щених швидкостях у зв'язку з поліпшенням умов змащування [р]=(5...6) МПа.
Якщо умови (1) – (4) не виконуються, то збільшують довжину l повзуна, що рухається вздовж напрямної. Наближений розрахунок напрямних кочення виконується для випадку лінійного закону розподілу навантаження на тіла кочення, (рис. 34.3, в), тобто нехтують різницею у діаметрах тіл кочення. Якщо вибрати довжину напрямної l = Pz, де z – число робочих тіл кочення, а Р –їх крок, то силу, що сприймається найнавантаженішим крайнім тілом кочення, можна визначити за виразом (1) F1max = рmaxb·Р = F/z + 6Μ/(z2Ρ), (5)
а умову нерозкриття стику – на основі виразу (2)
F1min = рmaxb·Р = F/z – 6Μ/(z2Ρ) > 0. (6)
За максимальною силою F1max на тіло кочення перевіряють деталі напрямної на контактну втому. Для випадку контакту кульки діаметром dк із площиною маємо
σH
= ZM
·![]() ≤ [σ]Η.
(7)
≤ [σ]Η.
(7)
Для сталевих деталей коефіцієнт ZM = 1700 (МПа)2/3. Допустимі контактні напруження для сталевих загартованих кулькових напрямних [σ]Η = (1800...2000) МПа, а для термічне необроблених – [σ]Η = (500...600) МПа. Якщо умови (6) та (7) при розрахунках не виконуються, то слід збільшити число тіл кочення z, зберігши їхній крок Ρ та діаметр.
Лекція 29 – 32 муфти приводів
1. Загальні відомості та класифікація муфт
Муфтами називають пристрої, що з'єднують вали і передають обертовий момент. Інколи муфтами з'єднують вал із розміщеними на ньому деталями – зубчастими колесами, шківами, зірочками тощо.
Застосування муфт пов'язане з тим, що більшість машин, у тому числі і їхній привод, компонують із окремих складальних одиниць, що мають вхідні та вихідні вали. Такими складальними одиницями є, наприклад, двигун, редуктор і робочий орган машини. Безпосередній кінематичний і силовий зв'язок між двигуном і редуктором, редуктором і робочим органом здійснюється за допомогою муфт. Потреба у муфтах виникає і в тих випадках, коли довгі вали за умовами технології виготовлення і складання або транспортування слід виготовляти з кількох складових частин.
З'єднання валів і передавання обертового моменту є спільним, але не єдиним призначенням муфт. Муфти можуть виконувати і інші функції, такі як компенсування похибок взаємного розміщення валів, захист елементів машини від перевантажень, зменшення динамічних навантажень, з'єднання і роз'єднання робочого органу машини з двигуном без його вимикання.
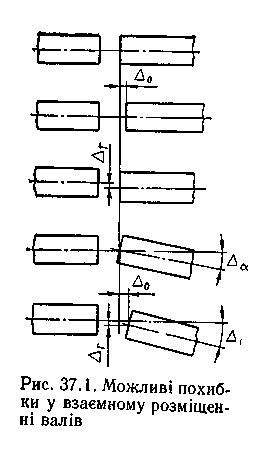
Характерні похибки взаємного розміщення валів, які потрібно з'єднувати муфтами, показані на рис. 37. 1. Розрізняють осьове зміщення Δ0 валів, радіальне зміщення Δ, і кутове зміщення Δα. На практиці переважно зустрічається комбінація вказаних похибок, яку надалі будемо називати неспіввісністю валів.
У машинобудуванні використовують муфти дуже різноманітних конструкцій. Найбільш часто вживані муфти стандартизовані.
Основною характеристикою муфти є обертовий момент Тр, на передаван–ня якого вона розрахована. Важливими показниками конструкцій муфт є частота обертання, габаритні розміри, маса і момент інерції.
Стандартні муфти не розраховують, а підбирають за обертовим моментом у відповідних довідниках. Лише у деяких випадках в разі потреби виконують перевірні розрахунки.
Муфти обчислюють за розрахунковим обертовим моментом Тр = КПТ,
де Τ – номінальний обертовий момент; Кп – коефіцієнт, що враховує коротко–часні перевантаження або режим роботи муфти. Для машин із невеликими приводними масами і спокійному навантаженні Кп = 1,0... 1,5, для машин із середніми масами та змінним навантаженням (поршневі компресори, стругальні верстати) КП = 1,5...2,0. У машинах із великими приводними масами та ударним навантаженням (молоти, прокатні стани,) беруть Кп = 2,5...3,0.
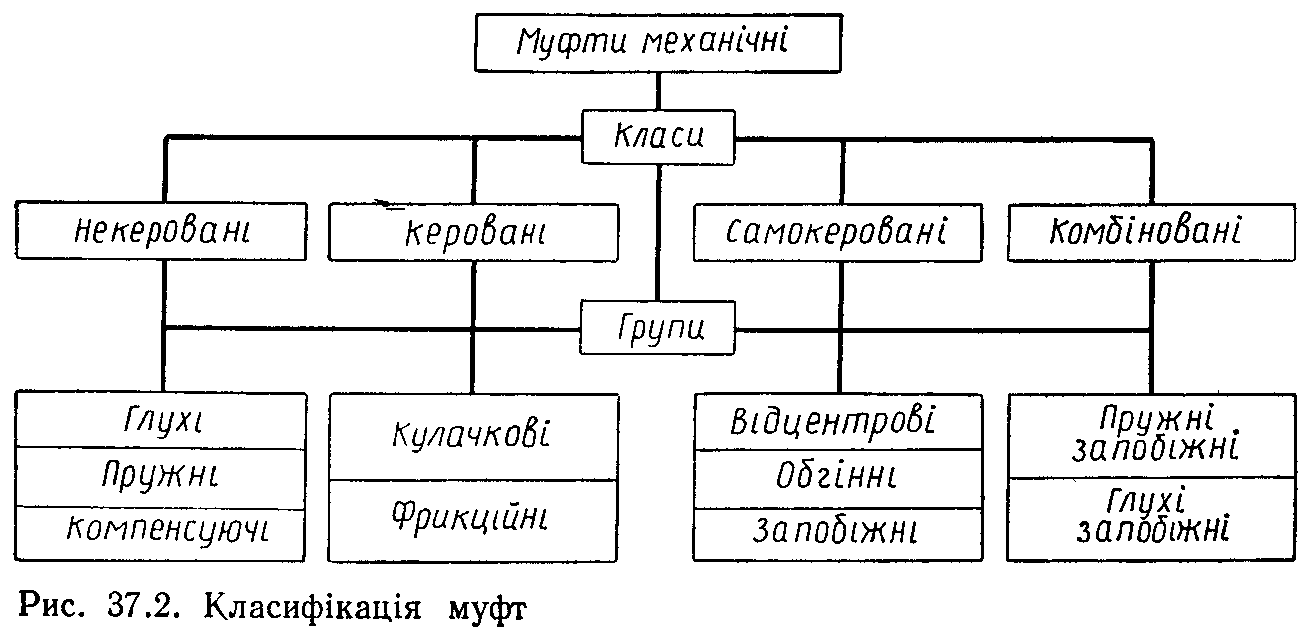
Усі муфти приводів машин за принципом роботи поділяють на три типи: механічні, електричні та гідравлічні.
Класифікація механічних муфт наведена на рис. 37.2 у вигляді структурної схеми. Усі муфти поділяють на чотири класи: некеровані, керовані, самокеровані та комбіновані. Кожний клас муфт складається з груп, а кожна група має відповідні підгрупи, види.