

/.Кинематический расчет привода^в случае применения вариаторов первых двух схем выполняют по заданной наибольшей скорости рабочей машины, тогда^ наименьшая скорость достигается выбором соответствующего диапазона регулирования вариатора^/
Для вариаторов третьей схемы при симметричном регулировании кинематический расчет привода выполняют при средней геометрической скорости иср = Vvmaxvmin, а скорости итах и vmin обеспечиваются соответствующим выбором передаточного отношения вариатора: в сторону замедления (редукции) /1Ш1Х ~— и в сторону ускорения /min =
''min
= L'cp . П _ VJPJA max "mln
Силовые зависимости
В передаче силами сцепления необходимо усилие нажатия; оно может быть постоянным или переменным, изменяющимся в зависимости от нагружения привода^1
В вариаторах первой схемы (R1 = const) при постоянном усилии нажатия имеем Мх = const и Ыг = const.
Такие вариаторы следует применять в приводах к машинам, у которых при всех режимах работы потребная мощность N2 не меняется.
Принцип использования двигателя на оптимальном режиме с наибольшим к. п. д. при постоянной отбираемой мощности экономически наиболее целесообразен. Так эксплуатируют, например, многие транспортирующие машины и металлорежущие станки, т. е. с уменьшением нагрузки скорость повышают.
Если мощность N2 задана, то максимальный момент на ведомом валу вариатора, Н -м i
'VI2 max —
w2min
где N2 в Вт, со2 в рад/с. Момент на ведущем валу
м ^тах 'max1!
расчетное окружное усилие Р= i = • (13.4)
Kl *2тах к2
Уточненное значение р может быть получено с учетом изменения г\ при разных режимах работы вариатора.
Вариаторы второй схемы при постоянном усилии нажатия передают постоянный предельный момент на ведомом валу. В некоторых машинах силовая нагрузка не меняется при изменении скорости, например, во многих технологических конвейерах (сушильных, покрасочных,
травильных), работающих с малыми скоростями; в намоточных устройствах нагрузка может быть принята не зависящей от скорости, привод работает при постоянном моменте и переменной мощности. Тогда расчетный момент на ведущем валу вариатора
Afi=-——.
Расчетное окружное усилие
к1 max к2
В вариаторах третьей схемы при постоянном усилии нажатия мощность, которую может передать вариатор при различных I, не остается постоянной, одновременно меняется и М2.
Расчетное окружное усилие, Н
р±(%\ ЛШ (13.6)
где N2 в Вт, Rx в м, сйг в рад/с.
В вариаторах с переменным усилием нажатия расчетное окружное усилие определяется в зависимости от изменения внешней нагрузки и характеристики нажимного устройства.!
Расчет нажимных устройств и отдельных деталей вариаторов ведут по определенному выше расчетному окружному усилию.
13.2. ВАРИАТОРЫ С ГИБКОЙ СВЯЗЬЮ
Вариаторы с гибкой связью (ременные и ременно-колодочные) просты по конструкции, 1и поэтому высокая точность их изготовления не требуется; но диапазон регулирования у них мал, габариты относительно велики.
Диапазон регулирования
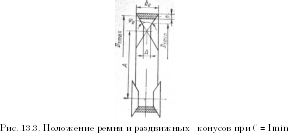
В вариаторах с клиновым ремнем (рис. 13.2) изменение передаточного отношения достигается одновременным изменением расчетных диаметров ведущего Dx и ведомого D2 шкивов, что осуществляется сближением и раздвижением конусов. При минимальном или максимальном передаточном отношении ремень на конусах располагается в крайних положениях (рис. 13.3).
Из чертежа следует
&„=(£>! max-£lmin + 2/t)tgf +Д.
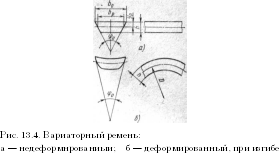
Расчетная ширина ремня по нейтральному слою (рис. 13.4)
bf ~Ь9- 2у9 tg Ц = (D, max -Di mm) tg I + h tg |° + A. 39G
Sft
Btu
Iff
V
Рис. 13.2. Принципиальная схема вариатора с гибкой связью
Полагая зазор между конусами в крайнем сдвинутом положении А = 0,05frp и обозначая-^ =v и ~тр- = $, получаем для симметричного регулирования при Dmax = Dmin Уд , г
(13.7)
/0,95v ctg?n--l
Н—г—
Если раздвижной только один шкив, то
0,95vctg^-l Д = rJ— + 1-
(13.8)
Анализ соотноо!ений (13.7), (13.8) показывает, что для повышения диапазона регулирования возможны следующие пути:
&„
1. Увеличение отношения v = . Для стандартных клиновых
ремней v = 1,33 + 1,42. Широкие клиновые ремни, по данным ряда иностранных фирм, имеют отношение v от 1,65 до 4,7.
Для широких клиновых ремней по нормали НИИРП — ЭНИМС (табл. 13.1) v = 3,1 + 3,2.
2. Уменьшение отношения g>
-mlii
Для стандартных клиновых
ремней минимальные значения £ таковы:
Тип ремня . £min • • • •
О
10,5
А
11,3
Б
11,9
В
14,8
Г
16,6
Д
21,2
Е
26,7
Рис. 13.5. Широкий клиновый ремень с увеличенной поперечной жесткостью
Надо учитывать, что уменьшение £ ведет к увеличению деформации ремня (см. рис. 13.4), повышению напряжений изгиба и к значительному снижению долговечности.
Для увеличения продольной гибкости и обеспечения поперечной жесткости ремни выполняют с зубьями на наружной или внутренней поверхности (рис. 13.5, а) или на обеих поверхностях (рис. 13.5, б). Для широких клиновых ремней значения £mjn = 5 -f- 7.
-
Уменьшение угла клина ср0. Для стандартных клиновых ремней ф0 = 40°. В зарубежной практике применяют широкие клиновые ремни с минимальными значениями ф0 = 20 -г- 24°. Но уменьшение Фо может повести к заклиниванию ремня в канавке и увеличению бокового давления.

-
Применение шкивов с прорезями (рис. 13.6), позволяющими сближать конусы, поэтому при том же Dmin можно получить большее
-
-
•Dmax и увеличить диапазон регулирования. Однако при этом срок службы ремней сни- 4 жается.
-
Из рис. 13.7 получаем
-
_ ^max ^min
-
(13.9)
-
-
~~ 2 "& 2 Расчетная ширина =
Pm,»-am.ntg«p, + At -
-
фо
-
-
l,9v ctg
-
(13 10) ^ис- '^.7. К определению I ' \ ' • I диапазона регулирования
-
шкивов с прорезями
-
где т — число раздвижных шкивов.
-
Значения D при двух раздвижных шкивах и симметричном регулировании показаны на рис. 13.8 и 13.9.
-
-
Расчет сечения ремня
-
Сечение стандартного клинового ремня для вариатора определяют методом, принятым для нерегулируемой передачи (см. гл. 11).
-
Характеристики широких клиновых ремней приведены в табл. 13.1.

-
Рис. 13.8. Диапазон регули- Рис. 13.9. Диапазон регули- рования для стандартных рования для широких рем- клиновых ремней ней
л
3,0
2,0 1,5 р


-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
Г,Г\П
-
Расчетная методика та же, что и в случае стандартных клиновых ремней:

-
Р
-
(13.11) (13.12)
-
fc0^2-0,4v Н/мм2;
-
Ср — коэффициент режима работы.
-
Усилие нажатия
-
Из рис. 13.10 следует
-
т = рп cos
-
Ч
-
2 *
-
Нормальное усилие рп связано с расчетным окружным усилием зависимостью
-
Следовательно, r=^cos|,
-
-
-
(13.13)
-
здесь Р = 1,2 -г- 1,4 —при нажатии со стороны ведомого конуса; (3 = 1,7 4-2,2 —при нажатии на ведущий конус. Коэффициент трения / ~ 0,3.


-
Механизм регулирования
-
Геометрическая длина ремня вариаторов с гибкой связью L = 2А + f (D„ + Dlx) +
<Da*-*V(13.14) -
(обозначения по рис. 13.11).
-
Выражая текущие значения диаметров через средний диаметр
-
D2x = Dcp + AD2; D1X=DC;-ADU получаем
-
L — 2A-\-1 [2Dcp + (AD2 - AZ?j)J +
(ADa+ADl)'. -
Обозначая L,_i = 2 A + nD получаем
-
L = Li.1 + ^(AD2-AD1)-
-
(AD2 +AD,12
-
(13.15)
-
Перемещение конусов (рис. 13.12) при раздвижении
-
фо 2 '
-
-
(13.16)
-
-
AD,t ф», Л2 — 2 ь 2 '
-
При
-
| = | х2 | й AD, = AD.j из выражения (13.15) следует, что геометрическая длина ремня при раздвижении и сближении увеличивается. Ремень, длина которого определена при i= 1, при крайних значениях i будет иметь недопустимо большое натяжение. Если
-
же выбрать длину ремня по imax, то при 1 =<: i ^ fmax его натяжение будет недостаточно для передачи заданной мощности.
-
Механизм регулирования должен поддерживать постоянное натяжение ремня при всех режимах работы вариатора.
-
13.2. Длины широких клиновых ремней нормали по НМ—2—58
-
Сечения ремней с зубьями X л, мм
-
Расчетная длина*, мм 25 X 8 25x11 32x10 32x14 40x13 40x18 50x16 50 X 22 63 X 20
-
800
-
900 1000 1120 1250 1400 1600 1800 2000
-
X X X X X X X X X
-
X X
-
X X X X X X X
-
-
X X X X X X X
-
-
X X X X X X X
-
-
-
X X
-
X X X X
-
-
-
-
X X X X
-
-
-
-
X X X X
-
-
-
-
-
-
X X
-
-
-
-
-
-
X X
-
* Рекомендуются длины, напечатанные жирным шрифтом.
-

-
Для определения длины ремня необходимо задаться межосевым расстоянием. В ременных и ременно-колодочных вариаторах принимают
-
А = (0,6-г-0,9) (£>ma;; + Dmin).
-
Для стандартных клиновых ремней следует в дальнейшем уточнить А по стандартному значению L (см. гл. 11, § 11.3). Аналогично поступают и с широкими ремнями, выравнивая длину ремня по табл. 13.2.
-

-
Рис. 13.12. Перемещение конусов и изменение расположения ремня
-
л по
-
Рис. 13.14. Бесступенчатая передача с тремя ремнями с регулируемым ведущим шкивом и непостоянным межосевым расстоянием
-
-
Передача с непостоянным межосевым расстоянием
-
Наиболее простая схема регулирования, при которой электродвигатель перемещается на салазках, представлена на рис. 13.13. Если на ведомом валу один из конусов фиксирован от осевого смещения (на рис. 13.13 левый конус), то во избежание перекоса ремня электродвигатель должен перемещаться под углом р к центровой линии ремня.
-
Перемещение х центровой линии
-
х2 _ АР2, о — А 1&
-
2 '
-
-
tgP-

-
-
-
L — nDi
-
A max —
-
Amin определяют по формуле § 11.3 при Dj = D2 = Z?2max = ДВХ.
-
В схеме с Dx = const нецелесообразно применять D.2min>D|, так как это приводит к большим значениям | и уменьшению диапазона регулирования.
-
Для бесступенчатого снижения угловой скорости лучше применять вариаторы с регулируемым ведущим шкивом (рис. 13.14), усилие нажатия создается пружинами или резиновой втулкой (рис. 13.15). Выбор той или иной схемы опре-
-
Рис. 13.16. Шкивы, обеспечивающие равное перемещение конусов:
-
а — конструкция с уравнительным рычагом: 6 — конструкция с зубчатореечным
-
Механизмом
-
-
деляется нагрузочной характеристикой привода; при постоянной передаваемой мощности целесообразна конструкция с регулируемым ведущим шкивом (рис. 13.14), а для постоянного момента на валу — с регулируемым ведомым шкивом (см. рис. 13.13).
-
Шкивы с равным перемещением обоих конусов (рис. 13.16) позволяют раздвигать валы вдоль средней линии ремня, что упрощает конструкцию. При увеличении межосевого расстояния передачи правый конус (рис. 13.16, а) под действием ремня сдвинется вправо; уравнительный рычаг, ось вращения которого несколько смещена от оси вала, повернется и отведет левый конус в левую сторону. При конструировании следует предусмотреть хорошую смазку поверхностей, по которым происходит осевое смещение. Аналогичная конструкция приведена на рис. 13.16, б, но здесь равное перемещение конусов обеспечивается двумя зубчатыми рейками и зубчатым колесом. Изменение
-
межосевого расстояния может быть осуществлено расположением электродвигателя на качающейся плите (рис. 13.17). Шкив на двигателе должен быть выполнен по рис. 13.16, чтобы не происходило смещения средней линии ремня при регулировании.

-
Завод «Выдвиженец» (г. Псков) изготовляет вариаторы с раздвижными конусами на валу электродвигателя. Технические данные таких вариаторов приведены в табл. 13.3, а габаритные и присоединительные размер их — на рис. 13.18 и в табл. 13.4.
-
-
а — схема передачи с качающимся про-межуточным валом; б — конструкция шкива промежуточного вала
-
-
|
|
|
|
|
|
|
||