

40. Загальна характеристика кеш-пам’яті
Кеш-пам’ять
(від Cache
– тайник) – це засіб копіювання і
зберігання блоків даних основної пам’яті
типу DRAM
в процесі виконання програми. Кеш-пам’ять
побудована на швидкодіючих тригерних
ЕП, але має невелику ємність порівняно
з основною динамічною пам’яттю. Кеш
зберігає обмежене число даних і тегів.
Тег містить інформацію про фізичну
адресу і стан даних. При кожному зверненні
до основної пам’яті спеціальний
контролер перевіряє за тегом наявність
цієї копії в кеші. Якщо вона є, то
виробляється сигнал Hit (кеш-попадання)
і звернення відбувається до кеш-пам’яті
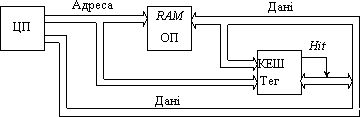
Рис. 15.3. Структура кеш-пам’яті
Якщо копії немає (кеш-промах), то сигнал Hit не виробляється і виконується читання з ОП та одночасне розміщення зчитаних даних в кеші. Обмін з ОП може відбуватися двома способами:
перший: звернення до ОП поєднується з одночасним пошуком інформації в тегу. Звернення при попаданні до ОП анулюється;
другий: звертання до ОП проводиться тільки після виявлення кеш-промаху. У сучасних комп’ютерах кеш будують за дворівневою схемою: первинний кеш (L1 Cache) має об’єм десятки Кбайт і вбудовується в процесор. Для підвищення продуктивності часто використовуються роздільні кеші для команд і даних (Гарвардська архітектура); вторинний кеш (L2 Cache), звичайно встановлюють на системній платі, він має об’єм декілька Мбайт. Більшість прикладних програм має циклічний характер і багаторазово використовує одні й ті самі дані, тому наявність кеша зменшує кількість звернень до відносно повільної ОП.
41. Флеш па́м'ять — це тип довговічної комп'ютерної пам'яті, зміст якої можна видалити чи перепрограмувати електричним методом.
На відміну від Electronically Erasable Programmable Read-Only Memory дії над нею виконуються в блоках, що розташовані у різних місцях (у перших розробках флеш пам'яті її чип повинен був очищуватись лише один раз). При значно меншій ціні флеш пам'яті у порівнянні з EEPROM, вона стала домінуючою технологією, у випадку, коли необхідно довготривале, стійке збереження інформації. Приклади її застосування найрізноманітніші. Від цифрових аудіо-плеєрів, камер до мобільних телефонів і КПК. Флеш пам'ять також використовується в USB флеш дисках («пальчикового типу» чи тип «переносного диску»), які зазвичай використовуються для глобального збереження та просто передачі інформації між двома комп'ютерами. Деяку популярність вона отримала в геймерському світі, де часто використовували EEPROM'и чи залежні від живлення SDRAM пам'яті для збереження інформації на рахунок прогресу гри.
Флеш пам'ять — це тип пам'яті, яка може на довготривалий час зберігати певну інформацію на своїй платі, зовсім не використовуючи живлення. В додаток можна сказати, що флеш пам'ять пропонує високу швидкість доступу до інформації (хоча вона не настільки висока як у DRAM) і кращий опір до кінетичного шоку, ніж у вінчестерах. Ці характеристики пояснюють популярність флеш пам'яті для приладів, що залежать від батарейок. Іншою приманкою флеш пам'яті є те, що коли вона скомпресована в суцільну «карту пам'яті», стає майже неможливо зруйнувати її стандартними фізичними методами, що дає змогу витримувати високий тиск і киплячу воду.
Флеш пам'ять (обидва типи — NOR та NAND) була винайдена доктором Фуджіо Масуока, коли він працював на компанію Toshiba у 1984 р. Якщо вірити Toshiba, назва «Флеш» прийшла на думку колезі доктора Масуока — містеру Шої Аріїзумі, оскільки процеси видалення вмісту пам'яті нагадували йому спалах фотокамери (англ. flash). Доктор Масуока репрезентував винахід у 1984 році на зустрічі про Міжнародні Електронні Прилади (IEDM), яка відбулася в місті Сан-Хосе, Каліфорнія. Intel побачив високий потенціал цього винаходу і випустив перший комерційний чип NOR флеш пам'яті у 1988 році.
Пам'ять, що базується на NOR має довготривалі цикли запису-видалення інформації, проте повноцінний адресний/інформаційний інтерфейс, який дає довільний доступ до будь-якої локації. Це робить його ідеальним для збереження програмного коду, який не потрібно часто оновлювати. Прикладом є комп'ютерний BIOS або програмне забезпечення різноманітних приладів. Цей інтерфейс витримує від 10 000 до 1 000 000 циклів видаляння інформації. Даний тип пам'яті став базою найперших переносних медіа; Compact Flash з самого початку базувався на ньому, хоча потім перейшов на дешевший варіант — NAND пам'ять.
42. Арифметико-логічний пристрій (АЛП) призначений для виконання логічних
та арифметичних операцій над двома багаторозрядними числами. Типовим
варіантом мікроелектронної реалізації АЛП є ІМС (див.табл.18), які
розраховані на виконання 16 логічних та 16 арифметичних операцій з двома
чотирьохрозрядними числами. Наприклад, 564ИП3 (рис.19) має вісім
функціональних входів для введення двох чисел A та B, чотири виходи
F3-F0 для подання результату дії з числами, чотири входи керування S3-S0
для задання однієї з 16 операцій, вхід V ознаки операцій (1-логічні,
0-арифметичні), вхід переносу Cn, вихід компаратора FA=B та виходи C, G,
P для організації паралельного перенесення при нарощуванні розрядності
АЛП. Нарощування проводять за допомогою додаткової мікросхеми СПП
(див.табл.18). Так, 564ИП4 дозволяє об'єднати чотири АЛП 564ИП3 і
отримати 16-розрядний АЛП.
На основі мікросхем АЛП, СПП та інших можна будувати різноманітні
обчислювальні пристрої, які керуються системою команд, тобто такі, які
працюють під керуванням програм. АЛП входить в структуру
мікропроцесорів. цій, а також операції логічного зсуву, обнулення, установки і т. п.
АЛП складається з регістра акумулятора, регістра тимчасового зберігання, ПЗУ констант, суматора, додаткового регістра (регістру В), акумулятора, регістра стану програми.
Регістр акумулятора і регістр тимчасового зберігання - восьмирозрядних регістри, призначені для прийому і зберігання операндів на час виконання операцій над ними. Програмно не доступні.
43. Керуючий автомат (КА) генерує послідовність керуючих сигналів, яка передбачена мікропрограмою і відповідає значенням логічних умов. Інакше кажучи, керуючий автомат задає порядок виконання дій в операційному автоматі, який виходить з алгоритму виконання операцій. Найменування операції, яку необхідно виконувати у пристрої, визначається кодом операції. По відношенню до керуючого автомату сигнали коду операції, за допомогою яких кодується найменування операції, і повідомлювальні сигнали х1,...,хi, які формуються в операційному автоматі, грають однакову роль: вони впливають на порядок генерування керуючих сигналів y. Тому сигнали коду операції і умовні сигнали відносяться до одного класу – до класу повідомлювальних сигналів, які поступають на вхід керуючого автомату.
В основі опису керуючих автоматів лежить принцип мікропрограмного керування. Він полягає в тому що будь-яка операція розглядається як складна що містить більш прості операції які називаються мікроопераціями тобто кожна операція – це визначена послідовність мікрооперацій.
Існують два основні типи керуючих автоматів
-
Керуючий автомат з жорсткою чи схемною логікою. Для кожної операції будується набір комбінаційних схем які в потрібних тактах збуджують відповідні керуючі сигнали. Іншими словами будується скінчений автомат в якому необхідна множина станів представляється станами k запам’ятовуючих елементів
Формалізований опис операційного автомату
В функцiональному та структурному вiдношеннi операцiйний пристрiй подiляється на двi частини: операцiйний та керуючий автомати. Операцiйний автомат ОА служить для збереження слiв iнформацiї, виконання набору мiкрооперацiй i обчислення значень логiчних умов, тобто операцiйний автомат є структурою, органiзованою для виконання дiй над iнформацiєю. Мiкрооперацiї, що реалiзуються операцiйним автоматом, iнiцiюються множиною керуючих сигналiв Y=[y(1),...,y(m)], з кожним iз них ототожнюється визначена мiкрооперацiя. Значення логiчних умов, якi обчислюються в операцiйному автоматi, вiдображаються множиною освiдомлюючих сигналiв X=[x(1),...,x(l)], кожний з яких ототожнюється з визначеною логiчною умовою. Керуючий автомат КА генерує послiдовнiсть керуючих сигналiв, визначену мiкропрограмою, яка вiдповiдає значенням логiчних умов. Іншими словами, керуючий автомат задає порядок виконання дiй в операцiйному автоматi, що зрозумiло з алгоритму виконання операцiй. Найменування операцiї, яку необхiдно виконати в пристрої, визначається кодом g операцiї. По вiдношенню до керуючого автомату сигнали g(1),...,g(h), за допомогою яких кодується найменування операцiї, i освiдомлюючi сигнали x(1),...,x(l), що формуються в операцiйному автоматi, грають однакову роль: вони впливають на порядок утворення робочих сигналiвY. Тому сигнали g(1),...,g(h) i x(1),...,x(l) вiдносяться до одного класу - класу освiдомлюючих сигналiв, що iдуть на вхiд управляючого автомату.
Таким чином, будь-який операцiйний пристрiй - процессор, канал вводу-виводу, пристрiй управлiння зовнiшнiм пристроєм - є композицiєю операцiйного та керуючого автоматiв. Операцiйний автомат, реалiзовуючи дiї над словами iнформацiї, є виконавчою частиною пристрою, роботою якого управляє керуючий автомат, генеруючий необхiднi послiдовностi управляючих сигналiв.
На даному етапi розгляду питання операцiйний та керуючий автомати можуть бути визначенi своїми функцiями - списком дiй, що ним виконується, виходячи iз яких в подальшому буде визначена структура автоматiв.