

Введение
Микроэлектроника, заявившая о себе в начале шестидесятых годов, сегодня оказывает решающее влияние на техническое перевооружение во всех областях радиоэлектроники. Цифровая техника - самое перспективное направление в современной электронике, в науке, народном хозяйстве, в учебном процессе в общеобразовательных школах, лицеях, техникумах, институтах и университетах. Без нее немыслим дальнейший научно-технический прогресс.
Постоянное повышение требований к качеству и надежности - характерная черта современного производства. Это обстоятельство приводит к необходимости постоянно модернизировать соответствующие информационно - управляющие системы. При этом, если эксплуатационные особенности, точность работы, надежность узлов системы, являющихся объектами контроля и управления (датчики, сигнализаторы, измерители и т.д.) не будут соответствовать функциональным и коммутационным возможностям устройств микропроцессорной техники, то рассчитывать на существенное улучшение свойств модернизируемой системы вряд ли стоит.
Целью курсового проекта является разработка микропроцессорной управляющей микроЭВМ, реализующей заданные взаимодействия с объектом управления (ОУ) и разработка программных средств системы, обеспечивающих выполнение заданного алгоритма управления.
-
Расшифровка и анализ задания
Задание на курсовой проект включает в себя набор исходных данных и ограничений для проектирования управляющей микроЭВМ.
Задание определяет:
- базовый микропроцессор К1810ВМ86, на основе которого требуется построить управляющую микроЭВМ.
- алгоритм управления определяется в задании видом функций f1 и f2 , длительностями управляющих сигналов t1, t2, t3, необходимо при срабатывании аварийного датчика (INT1) сформировать на пульте аварийную сигнализацию светодиодом (2Гц).
![]()
![]()
![]()
![]()
![]()
![]()
![]() мкс
мкс
![]()
![]() мкс
мкс
![]() мкс
мкс
- типы БИС, на которых должны быть реализованы блоки ПЗУ и ОЗУ: К537РУ8, К556РТ6.
Управляющая микроЭВМ проектируется на базе однокристального МП и включает в себя следующие основные устройства:
- процессорный модуль;
- память, состоящую из ОЗУ и ПЗУ;
- устройства параллельного ввода/вывода для связи с ОУ;
- блок последовательного канала для связи с ЭВМ верхнего уровня;
- программируемый системный таймер;
- контроллер прерываний;
- контроллер прямого доступа к памяти;
- пульт управления.
Алгоритм управления состоит из следующих этапов:
- обработка информации от цифровых
датчиков и выдача управляющего воздействия
![]() производится путем ввода значений х1,
х2, х3, х4 и вычисления
значения булевой функции f1(х1,
х2, х3, х4).(при единичном
значении f1
вырабатывается управляющий сигнал
производится путем ввода значений х1,
х2, х3, х4 и вычисления
значения булевой функции f1(х1,
х2, х3, х4).(при единичном
значении f1
вырабатывается управляющий сигнал
![]() =1
длительностью t1)
=1
длительностью t1)
- при обработке информации с аналоговых датчиков процессорный модуль принимает 8-разрядные двоичные коды NU1, NU2 с выводов АЦП и код константы К с регистра пульта управления; далее вычисляется значение функции NU=f2(NU1,NU2,K) и сравнивается с константой Q; в зависимости от результотов сравнения вырабатывается один из двух двоичных управляющих сигналов y2 или y3 длительностью t2 или t3 соответственно (если NU<Q, то выдается y2, иначе выдается y3);
- формируется управляющее воздействие Y4, для чего с АЦП вводится значение NU3 производится вычисление по формуле:
![]()
- значение Y4 в виде 8-разрядного кода выдается на вход ЦАП.
В системе необходимо предусмотреть следующие линии запроса на внешние прерывания:
INT0 – отказ источника питания;
INT1 – сигнал ха аварийного датчика ОУ;
INT2 – запрос от пульта управления;
INT3 – запрос от микроЭВМ верхнего уровня.
Программное обеспечение системы разрабатывается на языке Ассемблер соответствующего микропроцессора и включает следующие основные модули:
- модуль начальной инициализации системы;
- модуль управления;
- программы обслуживания прерываний, в том числе драйвер последова-тельного канала.
2 Разработка процессорного модуля, интерфейса и
уточненной структурной схемы.
2.1 Архитектура и режимы работы микропроцессора К1810ВМ86
Основные архитектурные особенности микросхемы К1810ВМ86, позволяющие больше чем на порядок повысить производительность систем, являются:
- мощная система команд с расширенными возможностями адресации памяти, включающая команды умножения, деления и обработки последовательностей байтов или слов;
- аппаратная реализация процесса совмещения операций выполнения и выборки команд;
- гибкая и мощная организация системы прерываний;
- аппаратная реализация некоторых механизмов взаимодействия нескольких процессов, упрощающая построение сложных мультипроцессорных систем.
Шестнадцатиразрядный однокристальный МП выполняющий около 2 млн. операций в секунду.
Синхронизируется с тактовой частотой 25 МГц.
Структурная схема микропроцессора К1810ВМ86 представлена на рисунке 1. Она включает следующие устройства: арифметико-логическое устройство (ALU) с тремя регистрами временного хранения операндов (RGB) и регистром признаков (RS); группу регистров общего назначения (RO—R7); микропрограммное устройство управления (MCU) для управления выполнением команд; схему управления доступом к магистрали (DMU); схему внутренней синхронизации (CLG), преобразующую внешние тактовые импульсы во внутренние последовательности синхроимпульсов и обеспечивающую синхронизацию МП с медленными ЗУ и УВВ; схему обработки запросов прерываний (INTU); схему управления циклами обмена (CU), осуществляющую управление работой 16-разрядного канала адреса/данных; буферы канала адреса/данных (BD/A); указатель команд (IP), выполняющий функции программного счетчика; сегментные регистры (RGS), содержащие базовые адреса программ, данных и стека; сумматор адреса (Sm), служащий для вычисления 20-разрядного физического адреса; регистры очереди команд (RI), предназначенные для формирования шестибайтной очереди команд готовых к исполнению.
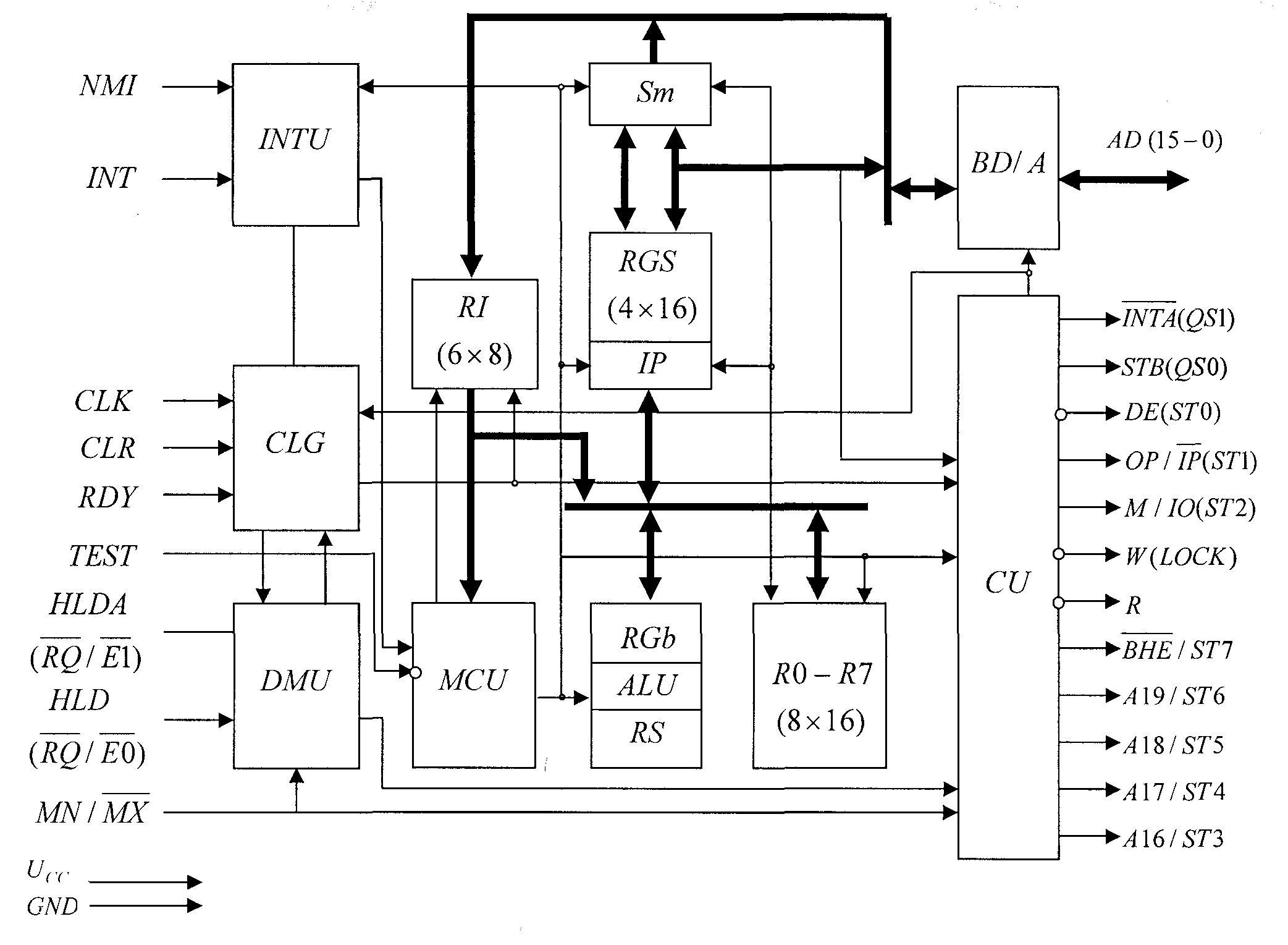
Рисунок 1 - Структурная схема микропроцессора К1810ВМ86
Отличительной особенностью архитектуры микропроцессора К1810ВМ86 является наличие двух основных асинхронно работающих устройств: устройства обработки (УО) и устройства сопряжения канала (УСК). Упрощенная структурная схема представляет МП в виде двух независимых устройств. УО декодирует и выполняет команды, а УСК осуществляет связь с внешними устройствами, обеспечивает выборку команд и данных из памяти, формирует очередь команд. Организация параллельной работы УО и УСК и уменьшение конфликтных ситуаций при обращении к памяти за счет применения очереди команд позволяет существенно повысить производительность систем на основе микропроцессора К1810ВМ86.
Регистровая модель микропроцессора К1810ВМ86 приведена на рисунке 2.
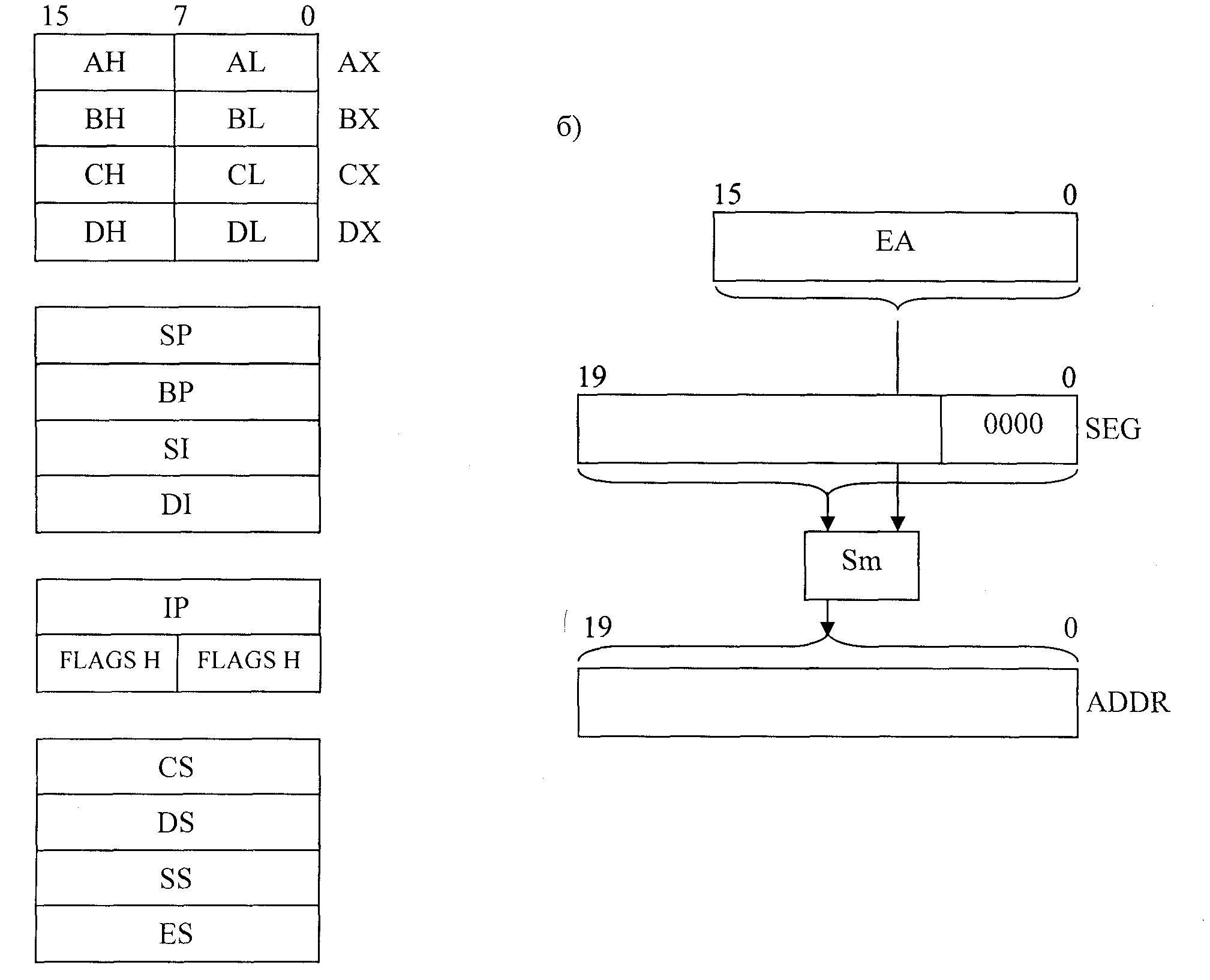

Рисунок 2 - Регистровая модель микропроцессора К1810ВМ86
Регистры CS, DS, SS и ES называются сегментными регистрами и используются при обращении к памяти для вычисления физических адресов ячеек. Основные назначения этих регистров следующие: регистр программного или кодового сегмента (CS) определяет текущий программный сегмент; содержимое регистра CS вместе с содержимым указателя команд (IP) задает адрес очередной команды выполняемой программы; регистр сегмента данных, или информационного сегмента (DS), используется в командах при обращении к данным; регистр стекового сегмента (SS) определяет текущий стековый сегмент и используется в командах обращения к стеку, при обработке подпрограмм и прерывании; регистр дополнительного сегмента (ES) обычно применяется как вспомогательный сегмент данных.
Регистры общего назначения АХ, ВХ, СХ и DX, называемые также регистрами данных, используются при выполнении арифметических и логических операций. Эти же регистры могут выполнять некоторые специальные функции, что и нашло отражение в их мнемонических обозначениях: АХ - аккумулятор, ВХ - базовый регистр, СХ - счетчик, DX - регистр данных. Эти регистры общего назначения допускают раздельную адресацию к их старшим (Н) и младшим (L) половинам и могут использоваться в виде набора 8-разрядных регистров.
Регистры общего назначения SP, BP, SI и DI называются адресными регистрами, так как в них хранятся относительные адреса, используемые для определения адресов операндов в пределах одного из сегментов памяти. В указателе стека (SP) и в указателе базы (ВР) содержаться относительные адреса в пределах стекового сегмента памяти, а в регистре индекса источника (SI) и регистре индекса приемника (DI) хранятся относительные адреса в пределах сегмента данных.
В пределах любого из сегментов емкостью в 64К байт обращение к операндам происходит с помощью 16-разрядного адреса смещения в сегменте. Этот адрес определяется способом адресации и называется также исполнительным адресом (ЕА). 20-разрядный физический адрес памяти (ADDR) формируется в сумматоре адреса (Sm) посредством сложения 16-раздного адреса смещения в сегменте с 16-разрядным адресом в сегментном регистре, сдвинутым на четыре разряда влево (рисунок 3).
Рассмотренные функции регистров микропроцессора К1810ВМ86 являются основными и реализуются в командах по умолчанию. Дополнительные возможности использования регистров указываются при описании конкретных видов команд.
Регистр признаков или флагов (RS) состоит из одноразрядных регистров, фиксирующих состояние процессора и применяемых для управления его функционированием (рисунок 2). Флаги CF, PF, AF, SF и ZF аналогичны флагам микропроцессора КР580ИК80А и характеризуют результат выполнения последней арифметической или логической операции. Флаг переполнения OF устанавливается в состояние 1 при переполнении, возникающем в результате арифметических операций над величинами со знаком. Флаги DF, IF и TF применяются для управления микропроцессором. Флаг направления DF служит для автоматического увеличения или уменьшения адреса при обработке последовательностей символов (имитация режимов автоинкрементной и автодекрементной адресации). Установка флага разрешения прерывания IF разрешает МП прием запроса прерывания на входе INT. Установка флага трассировки TF переводит МП в состояние прерывания после выполнения каждой команды, т.е. организует режим пошагового выполнения программ.
Микропроцессор К1810ВМ86 предназначен для использования как в простых однопроцессорных, так и в сложных мультипроцессорных системах управления и обработки информации. В связи с этим МП имеет специальный вывод MN/MX (рисунок 1) для задания минимального или максимального режимов функционирования. Каждый режим характеризуется некоторым набором управляющих сигналов, соответствующим сложности проектируемой системы. При подключении вывода MN/MX к выводу Ucc микропроцессор настраивается на работу в минимальном режиме, в котором все сигналы управления периферийными устройствами вырабатываются самим МП. При подключении вывода MN/MX к выводу GND происходит изменение функций ряда управляющих сигналов и МП перенастраивается на работу в максимальном режиме. В этом режиме МП используется обычно с системным контроллером, генерирующим сигналы управления системой. Управляющие сигналы максимального режима работы на рисунке 1 заключены в круглые скобки.
Таблица 1 - Описание выводов микропроцессора, общих для максимально
го и минимального режимов
|
Обоз, вывода |
№ контакта |
Назначение вывода |
|
AD (15-0) |
39,2-16 |
Три стабильные входы/выходы канала, образующие адресную шину в такте обращения к памяти Ti и шину данных в последующих тактах (Т2, Т3, Tw, T4) |
|
A19/ST6 A18/ST5 A17/ST4 A16/ST3 |
35-38 |
Три стабильные выходы, образующие четыре старших разряда адреса памяти в такте Ti и сигналы состояния в последующих тактах; ST5 - состояние триггера разрешения прерывания; ST4 и ST3 служат для указания используемого в цикле обмена сегментного регистра, ST6 - сигнал L-уровня |
|
ВНЕ/ST7 |
34 |
Три стабильный выход, используемый для разрешения передачи данных по старшей половине шины AD (15 - 8) в такте Т1 по L-уровню сигнала ВНЕ и как сигнал состояния ST7 в тактах Т2, Т3, Т4 |
|
R |
32 |
Три стабильный выход сигнала чтения L-уровня, используемого для считывания информации из устройств, подключенных к каналу МП, и выдаваемого в тактах Т2, Т3, Tw каждого цикла чтения |
|
RDY |
22 |
Вход сигнала готовности Н-уровня, поступающего от внешних устройств и подтверждающего их готовность к обмену |
|
INT |
18 |
Вход маскируемого запроса прерывания Н - уровня |
|
NM1 |
17 |
Вход немаскируемого запроса прерывания (по положительному перепаду на входе) |
|
TEST |
23 |
Вход сигнала проверки, анализируемый специальной командой ожидания WAIT |
|
CLR |
21 |
Вход сигнала установки внутренних схем МП |
|
CLK |
19 |
Вход тактовых сигналов синхронизации |
|
MN/MX |
33 |
Вход сигнала управления режимом работы МП |
|
Ucc |
40 |
Напряжение питания (+5 В) |
|
GND |
1; 20 |
Напряжение питания (0 В) |
Таблица 2 - Описание выводов МП, используемых для минимального
режима
|
Обоз, вывода |
№ контакта |
Назначение вывода |
|
W |
29 |
Три стабильный выход сигнала записи L-уровня, используемого для записи информации в ЗУ или УВВ в зависимости от состояния сигнала М/IO и выдаваемого в тактах Т2, Т3 и Tw каждого цикла записи |
|
M/IO |
28 |
Три стабильный выход сигнала обращения к ЗУ или УВВ, вырабатываемого в такте предшествующего цикла и поддерживаемого до завершающего такта Т4 текущего цикла: L-уровень сигнала соответствует обращению к УВВ, а Н-уровень - обращению к ЗУ |
|
OP/IP |
27 |
Три стабильный выход передачи или приема данных, предназначенный для управления направлением обмена информацией через шинные формирователи |
|
DE |
26 |
Три стабильный выход сигнала разрешения передачи данных L-уровня, вырабатываемый в каждом цикле обращения к ЗУ или УВВ и в циклах подтверждения прерывания |
|
STB |
25 |
Выход строба адреса - сигнала Н-уровня, используемого для записи адреса во внешний буферный регистр адреса и генерируемого в такте Ti любого цикла канала |
|
INTA |
24 |
Выход сигнала подтверждения прерывания L-уровня, генерируемого в тактах Т2, Т3 и Tw каждого цикла подтверждения прерывания |
|
HLD |
31 |
Выход сигнала захвата, указывающего на запрос канала другим процессором |
|
HLDA |
30 |
Выход сигнала подтверждения захвата, сопровождающегося переводом канала и шин управления в высокоимпедансное состояние |
Таблица 3 - Описание выводов, используемых для максимального режима
|
Обоз, вывода |
№ контакта |
Назначение вывода |
|
ST0 - ST7 |
26, 27, 28 |
Три стабильные выходы сигналов состояния цикла канала, генерируемых в тактах Т4, Ti и Тг и используемых контроллером канала для выработки сигналов управления обменом информации с ЗУ и УВВ |
|
RQE1, RQE0 |
30,31 |
Двунаправленные выводы сигналов запроса разрешения доступа к магистрали, используемых другими устройствами, чтобы отключить МП от канала в конце текущего цикла канала; приоритет вывода RQ/Е0 выше, чем вывода RQ/E1 |
|
LOCK |
29 |
Три стабильный выход сигнала блокировки системного канала, указывающего другим устройствам на запрет использования системного канала, пока сигнал LOCK имеет L-уровень |
|
QS1,QS2 |
24,25 |
Выходы сигналов состояния очереди команд |
Назначения выводов МП и соответствующих им сигналов, общих как для максимального, так и для минимального режимов, приведены в таблице 1. Назначения выводов, относящиеся только к минимальному режиму, даны в таблице 3, а только к максимальному в таблице 3. В максимальном режиме, как это видно из таблицы 4, МП использует лишь три вывода ST0 - ST2 для управления периферией и ЗУ через контроллер, а на остальных пяти выводах генерируется сигналы, необходимые для организации работы МП в мультипроцессорных системах.
Микропроцессор К1810ВМ86 осуществляет обмен информацией с ЗУ и ВУ через 16-разрядный канал адреса/данных с помощью временного мультиплексирования. Цикл функционирования канала включает обычно выдачу адресов ЗУ или УВВ, данных, а также сигналов, сопровождающих процесс обмена, и состоит из четырех машинных тактов (Т1, Т2, Т3, Т4). В такте Ti в канал выдается адрес ЗУ или УВВ. Обмен данными для цикла записи происходит в тактах Т2, Т3, Т4, а для цикла чтения в тактах Т3, Т4. Такт Т2 в цикле чтения используется для переключения МП из режима записи в режим чтения, а канал переводится в высокоимпедансное состояние. Для согласования с медленными УВВ или ЗУ с помощью RDY между тактами Т3 и Т4 могут включаться дополнительные такты ожидания (Tw), в течение которых данные в канале остаются неизменными. Наконец, в ряде случаев между относительными циклами канала могут вводиться холостые такты Т5.
Временные диаграммы циклов чтения и записи для минимального режима представлены на рисунке 4. В цикле чтения (рисунок 3а) выдается сигнал чтения R, а также сигналы управления направлением обмена P0/IP и разрешением передачи данных DE. Сигнал DE разрешает шинным формирователям передать данные в МП. В цикле записи (рисунок 3б) сигнал DE выдается раньше, чем в цикле чтения, а выдача данных и сигнала записи W производится по переднему фронту в такте Т2. Для многих ЗУ и УВВ требуется постоянство адреса в течение всего цикла канала, поэтому в такте Т1 каждого цикла выдается стробирующий сигнал STB, позволяющий зафиксировать адрес по заднему фронту сигнала STB.
а)
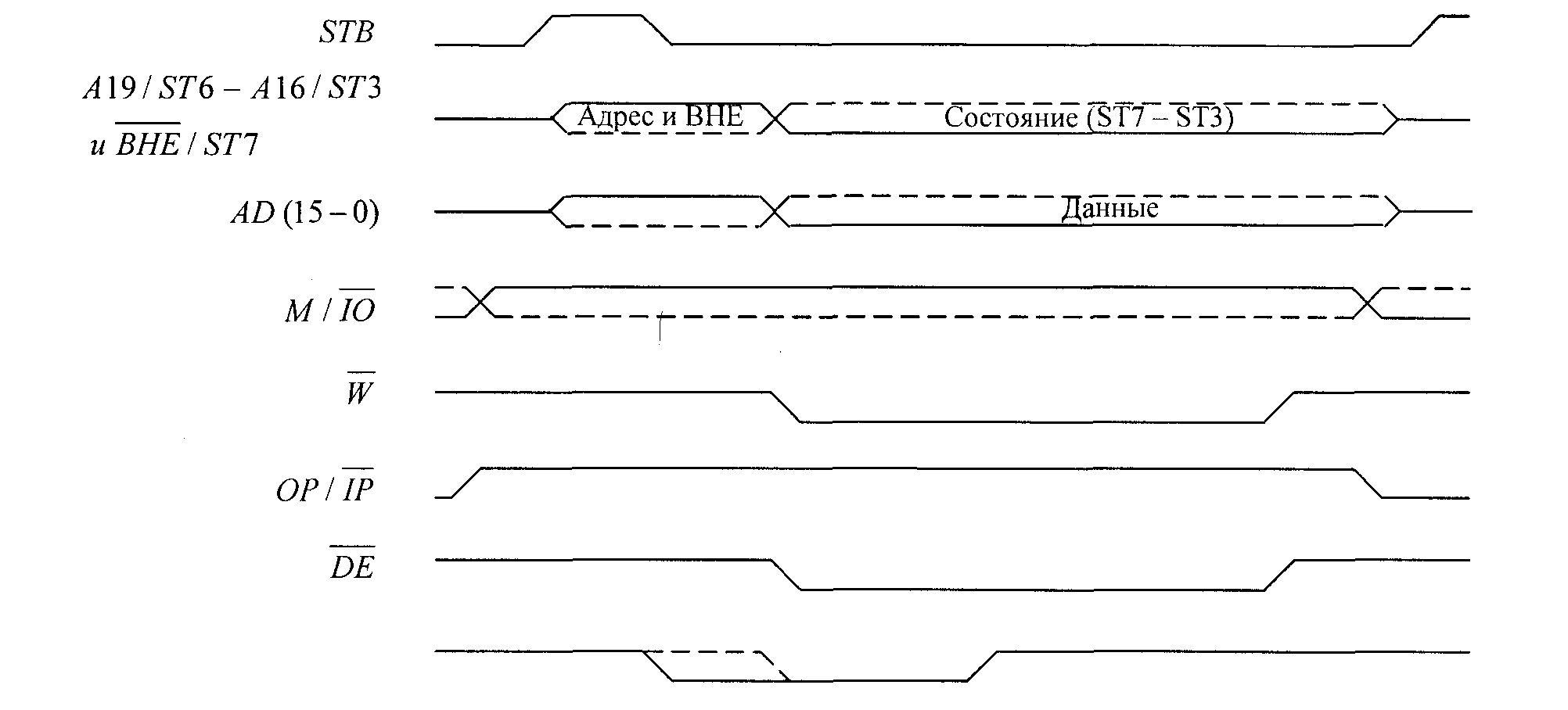
б)
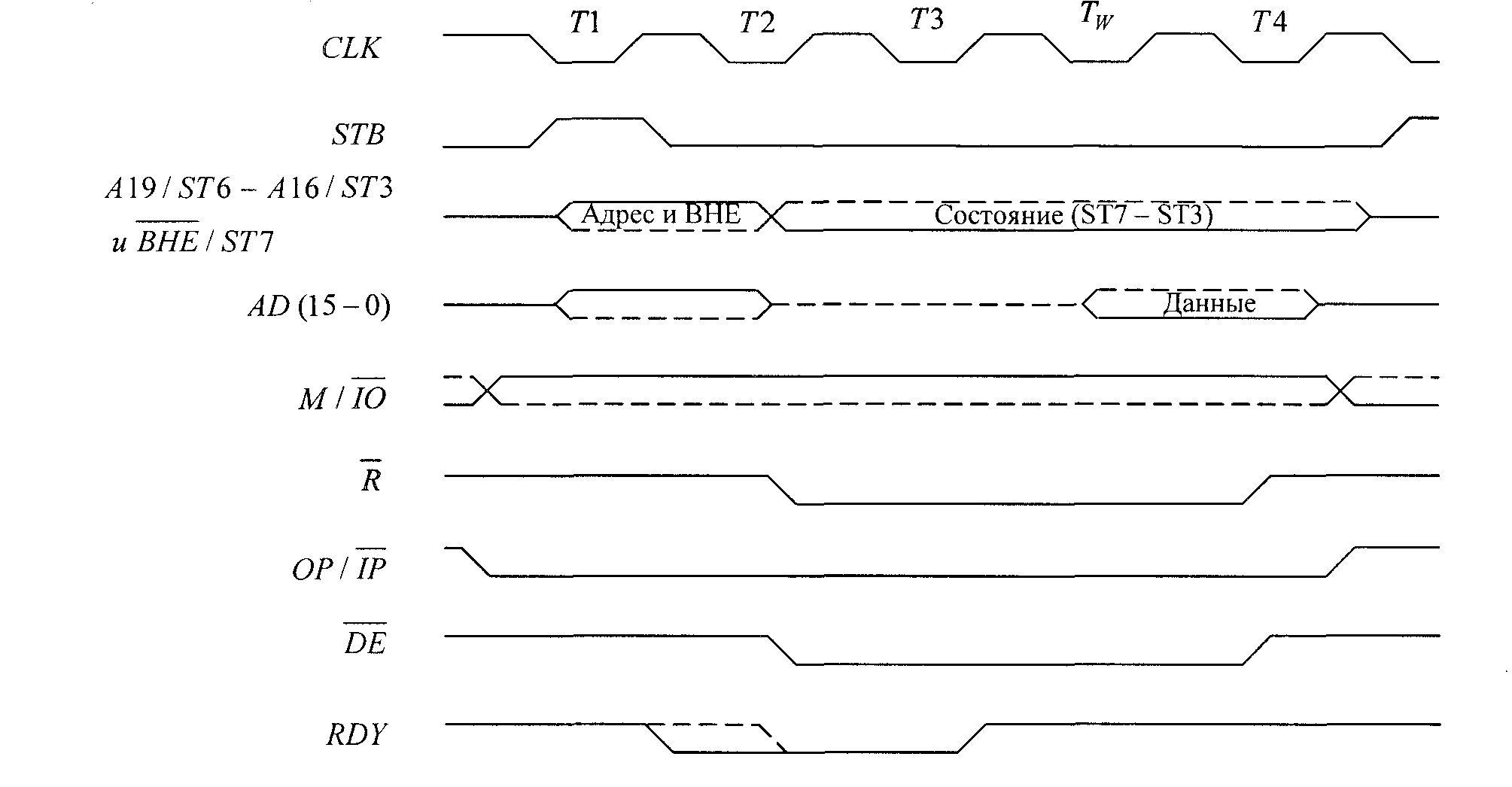
Рисунок 3 - Временная диаграмма цикла чтения (а) и записи (б)
Сигналы состояния ST3, ST4 указывают сегментный регистр, используемый в текущем цикле канала для вычисления физического адреса ячейки памяти.
Три 16-разрядных регистра очереди команд (RI) микропроцессора обеспечивают временное хранение 6 байт очереди команд (рисунок 1). УО микропроцессора при выполнении команды извлекает из очереди байт кода команды, не требуя доступа к каналу. УСК микропроцессора следит за состоянием очереди команд, пополняя ее, когда другие системные элементы не занимают память. При выполнении команд передачи управления очередь сбрасывается и после завершения перехода в место передачи управления начинает заполнять вновь. В максимальном режиме МП передает информацию о состоянии очереди на выходы QSO и QS1. Эта информация используется внешними процессорами. Тип цикла канала для максимального режима определяется с помощью сигналов ST2, ST1 и ST0.