

Пример 6.2
Проверить управляемость объекта, поведение которого описывает следующая система дифференциальных уравнений:
Определим матрицы
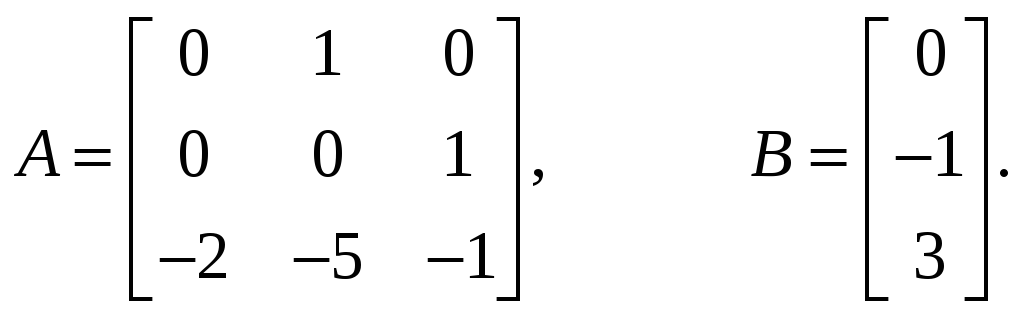
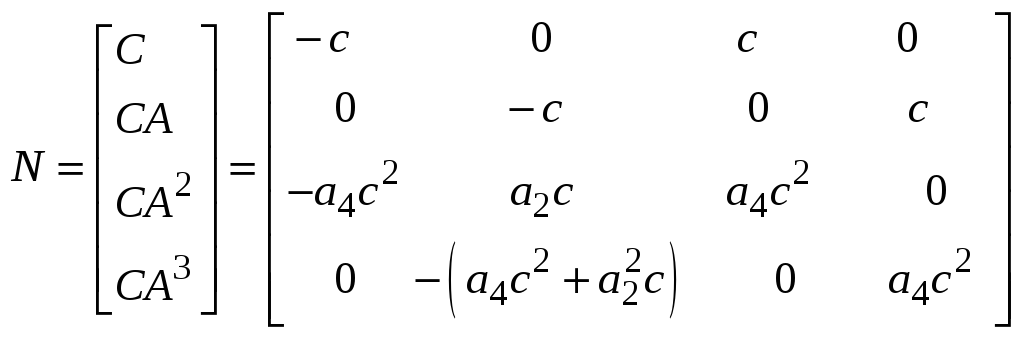
Запишем
матрицу управляемости в виде
![]() и вычислим матрицы произведений
и вычислим матрицы произведений
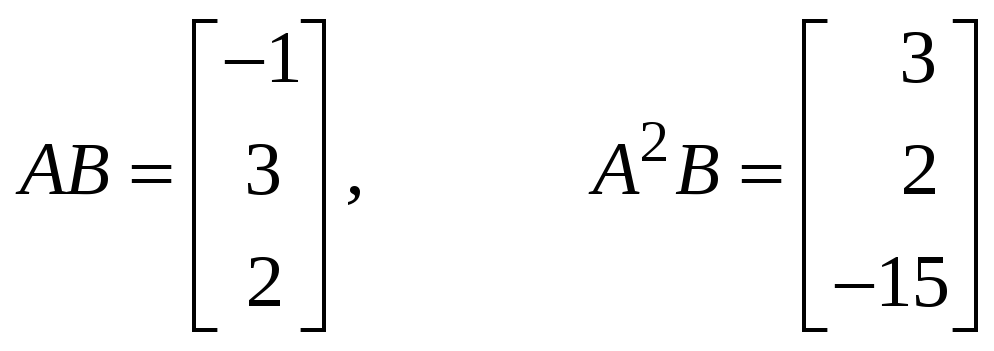 .
.
Составим матрицу управляемости
![]()
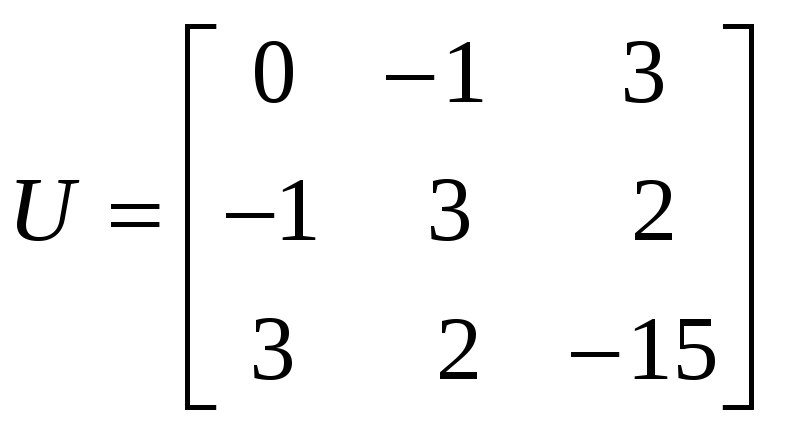
и
найдем ее определитель
![]() следовательно, объект управ-
ляем.
следовательно, объект управ-
ляем.
6.3.4. Наблюдаемость
Это понятие отражает возможность оценки переменных состояния объекта (6.12) по результатам измерения выходных пере-менных.
Объект
называется наблюдаемым,
если в любой момент времени можно
оценить состояние x
по данным измерения выходных переменных
![]() и управляющих воздействий
и управляющих воздействий
![]() .
.
Условие проверяется с помощью критерия наблюдаемости, который приводится без доказательства [1, 3]. Объект (6.12) наблюдаем тогда и только тогда, когда матрица наблюдаемости
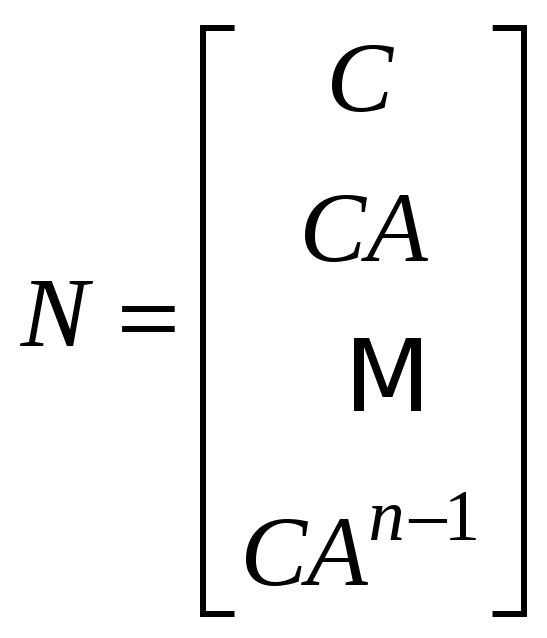 (6.18)
(6.18)
имеет полный ранг, т. е.
![]() (6.19)
(6.19)
Это условие можно проверить по соотношению
![]()
В случае одноканального объекта критерий наблюдаемости (6.19) принимает вид
![]() (6.20)
(6.20)
Задача синтеза будет иметь решение, если объект наблюдаем, т. е. условие наблюдаемости также является условием разрешимости задачи синтеза.
В
случае, когда
![]() ,
т. е. объект (6.12) не полностью наблюдаем,
существует невырожденное преобразование
переменных
,
т. е. объект (6.12) не полностью наблюдаем,
существует невырожденное преобразование
переменных
![]()
которое позволяет уравнения (6.12) записать в форме
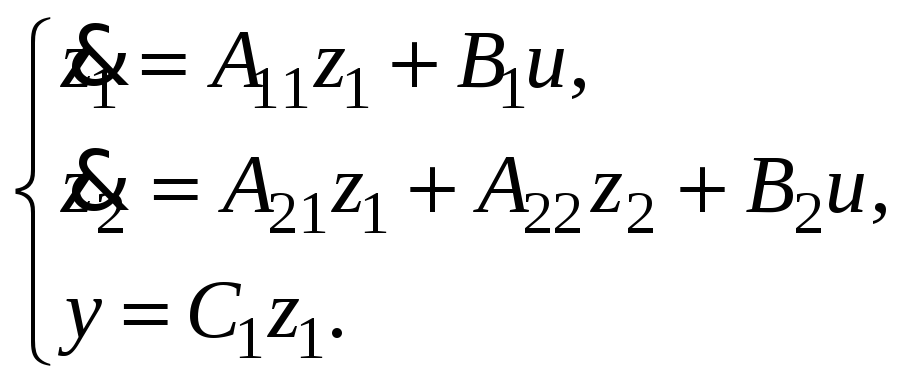 (6.21)
(6.21)
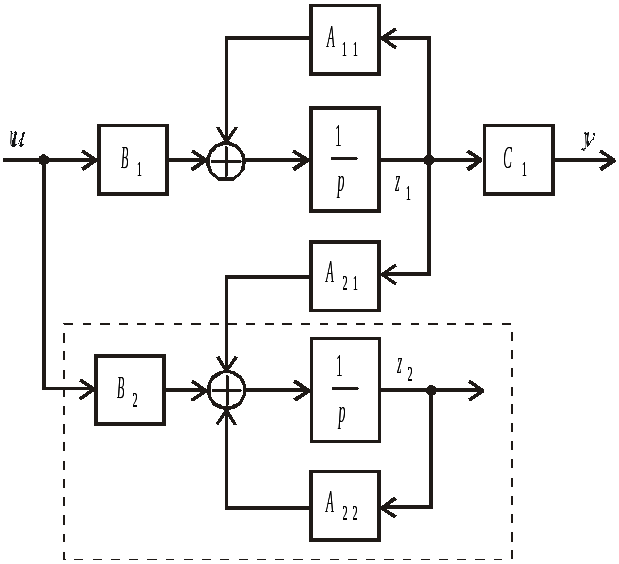
Здесь
переменные
![]() характеризуют ненаблюдаемую часть
объекта, структурная схема которого
приведена на рис. 6.6.
характеризуют ненаблюдаемую часть
объекта, структурная схема которого
приведена на рис. 6.6.
Н
Рис.
6.6. Структурная
схема не полностью
наблюдаемого
объекта
Пример 6.3
Проверить наблюдаемость объекта управления «каретка – маятник», схематичная модель которого изображена на рис. 2.3. В при- мере 2.5 получены матрицы объекта в виде
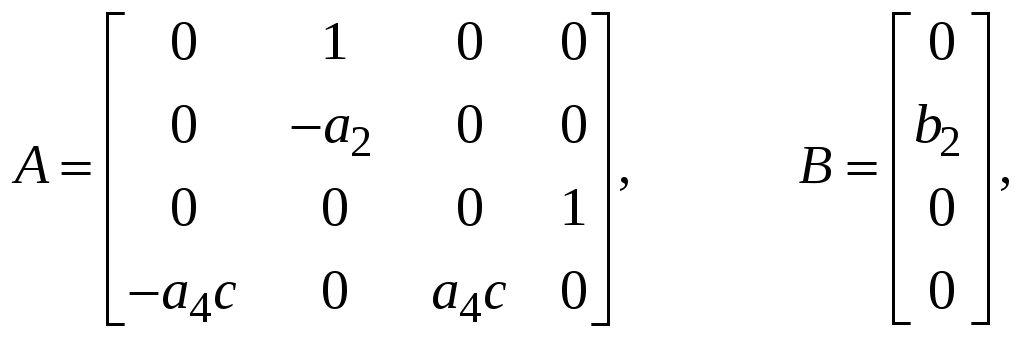
![]()
Составим матрицу наблюдаемости
![]()
и
определим ее детерминант. Так как
![]() объект «каретка – маятник» является
ненаблюдаемым.
объект «каретка – маятник» является
ненаблюдаемым.
6.3.5. Вырожденность передаточной функции
При получении передаточных функций реальных систем в числителе и знаменателе могут появиться одинаковые или близкие сомножители, например,
![]() (6.22)
(6.22)
После сокращения этих сомножителей получим вырожденную передаточную функцию
![]()
Система будет работоспособной только в том случае, когда выполняется условие разрешимости: общие сомножители числителя и знаменателя имеют корни с отрицательной вещественной частью
![]() (6.23)
(6.23)
Пример 6.4
Покажем, к чему приведет несоблюдение условия (6.23) для объекта, который состоит из трех параллельных каналов (рис. 6.7).
Определим для него передаточную функцию
![]()
которую представим в виде
Рис.
6.7. Структурная
интерпретация
условия разрешимости
![]()

Если
здесь полагать
![]() ,
то получим передаточную функцию
,
то получим передаточную функцию
![]()
где
![]() – общий сокращаемый множитель. При
выполнении условия
– общий сокращаемый множитель. При
выполнении условия
![]() передаточная функция принимает вид
передаточная функция принимает вид
![]() (6.25)
(6.25)
Наличие
сокращаемого множителя в числителе и
знаменателе (6.24) структурно означает
появление неуправляемой
части: при
![]() происходит разрыв связи и управление
не действует на звено с передаточной
функцией
происходит разрыв связи и управление
не действует на звено с передаточной
функцией
![]() процессы в котором развиваются в силу
собственных свойств.
процессы в котором развиваются в силу
собственных свойств.
При
![]() вместо (6.24) имеем
вместо (6.24) имеем
![]()
где
![]() – общий сокращаемый множитель. При
выполнении условия
– общий сокращаемый множитель. При
выполнении условия
![]() получим
получим
![]() (6.26)
(6.26)
Это
соответствует наличию ненаблюдаемой
части системы
с передаточной функцией
![]() которая не оказывает влияния на выход
системы.
которая не оказывает влияния на выход
системы.
При неустойчивой неуправляемой или ненаблюдаемой части объекта замкнутая система окажется неработоспособной.
Данный пример иллюстрирует одну особенность одноканальных систем. Если ее поведение описывается передаточной функцией, то наличие неуправляемой или ненаблюдаемой частей проявляется одинаково – в виде сокращаемых множителей в числителе и знаменателе.