

3. Моделирование систем массового обслуживания
3.1.Марковские системы и их математические модели
Если некоторая физическая система с течением времени в случайные моменты времени t1,t2,...,tn переходит соответственно в состояния Z1,Z2,...,Zn, то считается, что в системе протекает случайный процесс. Такой случайный процесс называется марковским, если вероятностные характеристики процесса в будущем зависят только от его состояния Z0 в данный момент времени t0 и не зависят от того, когда и каким образом система пришла в состояние Z0. Марковским процесс назван по- имени выдающегося русского математика академика А.А.Маркова, специалиста по теории вероятностей и математическому анализу.
В теории массового обслуживания широко используются марковские процессы с дискретными состояниями и непрерывным временем. Процесс называется процессом с дискретными состояниями, если все возможные состояния Z1,Z2,...,Zn можно перечислить заранее и переход из одного состояния в другое происходит скачкообразно, практически мгновенно. Если моменты переходов из состояния в состояние заранее неизвестны и могут осуществляться случайно в любой момент времени, то такие процессы называются процессами с непрерывным временем существования.
Рассмотрим примеры марковских процессов в СМО.
В вычислительном зале имеется две ЭВМ, обслуживающие потоки заявок (пользователей). В дискретные моменты времени t0,t1,t2.. пользователи подходят к ЭВМ. Тогда СМО вычислительный зал-пользователь может находиться в случайные моменты времени t0,t1,t2... в следующих четырех состояниях: Z0 - обе ЭВМ свободны от пользователей Z1 - первая ЭВМ обслуживает заявку, а вторая - свободна; Z2 - вторая ЭВМ обслуживает, а первая - свободна; Z3 - обе ЭВМ заняты обслуживанием пользователей. Здесь состояния системы заранее известны, их можно перечислить. Переходы из состояния в состояние случайны и могут осуществляться в любой момент времени. Вероятностные характеристики процесса обслуживания пользователей в будущем зависят лишь от состояния системы в данный момент времени (от того, в каком из состояний Z0,Z1,Z2,Z3 она находится в t0) и не зависят от прошлого, т.е. от того, когда и как система перешла в данное состояние. Такой процесс можно считать марковским с дискретными состояниями и непрерывным временем существования.
Приведем еще один пример. Пусть некоторая техническая система состоит
из n устройств (станки, подающие механизмы, элементы системы энергоснабжения и т.п.) и пусть эта система не может выполнять функции, если неисправно любое одно устройство. Тогда такая система имеет n+1 состояние: Z0 - все устройства исправны; Zi, i=1, n,-i-ое устройство отказало и находится в ремонте, а все остальные устройства исправны.
Совокупность технических устройств и бригады ремонтников можно рассматривать как систему массового обслуживания. Отказы технических устройств здесь образуют поток заявок на обслуживание, а бригады ремонтников являются обслуживающим устройством.
Процесс функционирования можно считать марковским с дискретными состояниями и непрерывным временем. Действительно здесь состояния Z0,Z1,Z2,...,Zn можно заранее перечислить, а переход системы из состояния в состояние происходит мгновенно в случайные моменты времени. Кроме того, вероятностные характеристики обслуживания отказавших устройств можно считать зависящими лишь от состояния системы в момент t0 и независящими от предыстории ее функционирования.
Функционирование СМО удобно описывать с помощью ориентированного графа, вершины которого соответствуют состояниям системы Z1,Z2,...,Zn, а дуги – переходам из состояние в состояние.
В случае обслуживания пользователей двумя ЭВМ граф состояний будет иметь вид, показанный на рис.3.1. Из состояния Z0, когда заявка на обслуживание отсутствует и обе ЭВМ простаивают, возможны два перехода в случайные моменты времени - переход в состояние Z1, когда первая ЭВМ занята обслуживанием пользователя, а вторая - свободна, и в состояние Z2, когда вторая ЭВМ занята, а первая - свободна. Из состояний Z1 и Z2 возможны два переход: в состояние Z0, когда пользователь обслужен, а новая заявка на обслуживание не поступила, и в
с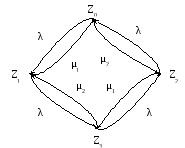 остояние
Z3,
когда заявка ЭВМ еще не обслужена, а
появилась новая заявка В состоянии Z3
образована очередь на
обслуживание пользователей.
Из состояния Z3
возможны переходы либо
остояние
Z3,
когда заявка ЭВМ еще не обслужена, а
появилась новая заявка В состоянии Z3
образована очередь на
обслуживание пользователей.
Из состояния Z3
возможны переходы либо
Рис.3.1. в состояние Z1, либо в состояние Z2, когда первая или вторая ЭВМ обслуживают лишь одного из пользователей, и очереди нет. Конечно, из состояния Z3 возможны и другие переходы, если пользователи с высокой интенсивностью приходят в вычислительный центр, и длина очереди растет. Однако, в данном примере не рассматриваются закономерности образования очереди.
Н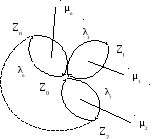 а
графе рис.3.1 отсутствует переход из
состояния Z0
в состояние Z3.
Если поток
заявок является ординарным, то
вероятность поступления одновременно
более одной заявки теоретически равна
0, а это означает, что переход из Z0
в Z3
невозможен. Часто на графе состояний
указываются интенсивности переходов.
В нашем случае на рисунке обозначены:
λ - интенсивность поступления заявок,
μ1
- интенсивность обслуживания пользователя
первой ЭВМ, μ2
- интенсивность обслуживания пользователя
второй ЭВМ.
а
графе рис.3.1 отсутствует переход из
состояния Z0
в состояние Z3.
Если поток
заявок является ординарным, то
вероятность поступления одновременно
более одной заявки теоретически равна
0, а это означает, что переход из Z0
в Z3
невозможен. Часто на графе состояний
указываются интенсивности переходов.
В нашем случае на рисунке обозначены:
λ - интенсивность поступления заявок,
μ1
- интенсивность обслуживания пользователя
первой ЭВМ, μ2
- интенсивность обслуживания пользователя
второй ЭВМ.
На рис.3.2. приведен граф состояний СМО, состоящий из n технических устройств и ремонтной бригады. В этом примере состояние Z0 - все устройства исправны. Из этого состояния система в случайные моменты времени может перейти с интенсивностью λ1,λ2,...,λn соответственно в состояние Z1, Z2,…
Рис.3.2 Zn. В состоянии Zi, i=1,n i-ое устройство отказало и ремонтируется, остальные устройства исправны, но вся система без i-го устройства не работает. Из i-го отказового состояния Zi система с интенсивностью восстановления μi, i=1,n может вернуться в работоспособное состояние Z0, когда все устройства исправны. В этой модели функционирования СМО предполагается, что в течение времени ремонта отказавшего устройства другие устройства не работают, и отказать не могут, то есть поток отказов ординарный.
Таким образом, для описания мартовской системы необходимо:
-
определить понятие состояния системы; состояния могут быть
связаны с числом заявок, находящихся в системе с моментами
обработки заявок и т.п.;
-
определить количество все возможных состояний
-
задать начальное состояние Z0;
-
построить граф состояний;
-
з
 адать
интенсивности переходов между всем
состояниями:
где Pij
– вероятность перехода из состояния
Zi
в Zj.
адать
интенсивности переходов между всем
состояниями:
где Pij
– вероятность перехода из состояния
Zi
в Zj.
Исчерпывающей характеристикой систем массового обслуживания описанного типа являются вероятности всевозможных состояний, системы для определения которых составляются система линейных дифференциальных уравнений с постоянными коэффициентами.
Способы составления уравнений рассматриваются на примере.
П усть
имеется система массового обслуживания,
множество состояний которой и переходы
можно представить в виде графа на
рис.3.3.
усть
имеется система массового обслуживания,
множество состояний которой и переходы
можно представить в виде графа на
рис.3.3.
Рис.3.3.
Вероятность нахождения системы в состоянии Zi обозначается Pi(t); интенсивности переходов между состояниями Zi и Zj – λij(i,j = 1,n).
Определим вероятность нахождения системы в состоянии Z2 - P2(t); для чего рассмотрим промежуток времени от t до t + ∆t и вычислим вероятность того, что в конце этого промежутка система будет находится в состоянии Z2. Это может произойти в следующих случаях:
-
в момент времени t система находилась в состоянии Z2 и за время ∆t не вышла из этого состояния;
-
в момент времени t система находилась в состояниях Z1 и Z5, но за время ∆t перешла в состояние Z2.
В![]()
![]() ычислим
вероятности событий a)
и b).
Вероятность P2(t
+ ∆t),
будет равна
произведению вероятностей пребывания
системы в момент времени t
в состоянии
Z0
и вероятности того, что за ∆t
она не выйдет из этого состояния:
ычислим
вероятности событий a)
и b).
Вероятность P2(t
+ ∆t),
будет равна
произведению вероятностей пребывания
системы в момент времени t
в состоянии
Z0
и вероятности того, что за ∆t
она не выйдет из этого состояния:
где
В![]() ероятность
события b)
равна сумме вероятностей перехода
системы из состояний Z1
Z5:
ероятность
события b)
равна сумме вероятностей перехода
системы из состояний Z1
Z5:
С![]() уммарная
вероятность P2(t
+ ∆t),
будет равна:
уммарная
вероятность P2(t
+ ∆t),
будет равна:
О![]() бразовав
в левой части (3.1) конечную разность и
устремив ∆t
к нулю, получим :
бразовав
в левой части (3.1) конечную разность и
устремив ∆t
к нулю, получим :
А![]() налогично
можно получить производные вероятностей
и остальных состояний:
налогично
можно получить производные вероятностей
и остальных состояний:
Т![]()
![]()
 аким
образом получена система дифференциальных
уравнений, решив которую, можно определить
вероятности всевозможных состояний
системы. Обобщая уравнения системы,
можно записать:
аким
образом получена система дифференциальных
уравнений, решив которую, можно определить
вероятности всевозможных состояний
системы. Обобщая уравнения системы,
можно записать:
Уравнения можно написать, не прибегая к выводу, непосредственно по графу состояний, если использовать следующее правило: в левой части каждого из уравнений стоит производная вероятности i-го состояния; в правой части - сумма произведений вероятностей состояний, из которых выходят стрелки в данное состояние, на интенсивности соответствующих переходов, минус произведение суммарной интенсивности перехода из i-го состояния на вероятность этого состояния.
П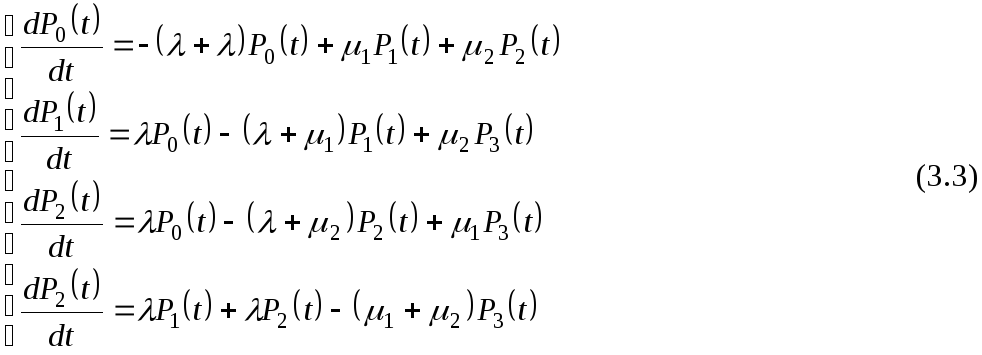 ользуясь
этим правилом, можно записать систему
уравнений СМО, граф состояний которой
изображен на рис.3.1. Обозначим P0(t),
P1(t),
P2(t),
P3(t)
- вероятности пребывания системы в
момент времени t соответственно в
состояниях Z0,
Z1,
Z2,
Z3.
Тогда система уравнений будет иметь
вид:
ользуясь
этим правилом, можно записать систему
уравнений СМО, граф состояний которой
изображен на рис.3.1. Обозначим P0(t),
P1(t),
P2(t),
P3(t)
- вероятности пребывания системы в
момент времени t соответственно в
состояниях Z0,
Z1,
Z2,
Z3.
Тогда система уравнений будет иметь
вид:
Решение дифференциальных уравнений возможно, если известны начальные условия функционирования системы. Часто можно рассматривать работу системы с момента времени, когда она свободна от заявок. Тогда за начальные условия принимаются: P0(0) = 1, P1(0) = P2(0) = ... = Pn(0) = 0.
Уравнения вида (3.1), (3.2) и (3.3) называют уравнениями А.Н.Колмогорова, по имени выдающегося советского математика.
Важным свойством уравнение Колмогорова является следующее: сумма правых частей уравнения равна нулю. Это свойство можно использовать при проверке правильности написания уравнений.
Можно доказать, что для системы в стационарном состоянии вероятности состояний имеют предельные значения, не зависящие от начального состояния системы, то есть
limPi(t) = Pi , i=1,n, (3.4)
t→∞
где Pi – финальные вероятности.
Э![]() то
означает, что при определении финальных
вероятностей следует все производные
в левой части уравнений Колмогорова
принять равным нулю. Тогда система
дифференциальных уравнений превращается
в систему линейных алгебраических
уравнений.
то
означает, что при определении финальных
вероятностей следует все производные
в левой части уравнений Колмогорова
принять равным нулю. Тогда система
дифференциальных уравнений превращается
в систему линейных алгебраических
уравнений.
 Для
случайной системы, граф состояний
которой приведен на рис.3.1.,
система
уравнений имеет вид:
Для
случайной системы, граф состояний
которой приведен на рис.3.1.,
система
уравнений имеет вид:
О![]() днородные
уравнения (3.5) и (3.6) можно решить, используя
уравнение, называемое нормировочным
(сумма вероятностей всех состояний
равна единице):
для
случая уравнений (3.6)
днородные
уравнения (3.5) и (3.6) можно решить, используя
уравнение, называемое нормировочным
(сумма вероятностей всех состояний
равна единице):
для
случая уравнений (3.6)
P0+P1+P2+P3 = 1
Теперь можно одно любое уравнение системы исключить и заменить его нормировочным. Система будет иметь единственное решение. Смысл финальных вероятностей становится понятным, если их интерпретировать как средние относительные времена пребывания системы в соответствующих состояниях. Например, если в первом примере Р0=0.2; P1=0.25; P2=0.25; P3=0.3, то это значит, что исследуемая СМО находится в состоянии Z0 в среднем две десятых времени, в состояниях Z1 и Z2 - по одной четверти времени и в состоянии Z3 - три десятых суммарного времени.
Зная финальные вероятности всех состояний СМО, можно найти ряд других важных показателей ее эффективности.
Часто в системах массового обслуживания интересуются не вероятностью пребывания в момент времени t в состоянии Zi, а вероятностью того, что в течение времени t система попадает (или не попадает) в это состояние. Тогда для определения Pi(t) следует считать, что процесс обслуживания закончен, если система попала в состояние Zi, т.е. считать, что переходы из i-го состояния в другие состояния невозможны ("экран" для соответствующих ветвей на графе состояний).
Пусть, например, нужно определить вероятность того, что техническая система, граф состояний которой изображен на рис.3.2., не откажет в течение времени ∆t, т.е. ни одно из устройств системы не попадет на обслуживание в ремонтную бригаду. Из графа видно, что в поставленной задаче необходимо определить вероятность P0(t) пребывания системы в состоянии Z0 в течение времени t.
Если же система попадет в одно из состояний Z1,Z2,...,Zn, то произойдет ее отказ. Очевидно, что для определения P0(t) необходимо в графе состояний запретить переходы в Z0 из состояний Z1,Z2,...Zn. На графе это отмечено пунктирными линиями ("экраны"). Тогда система дифференциальных уравнений примет вид:
П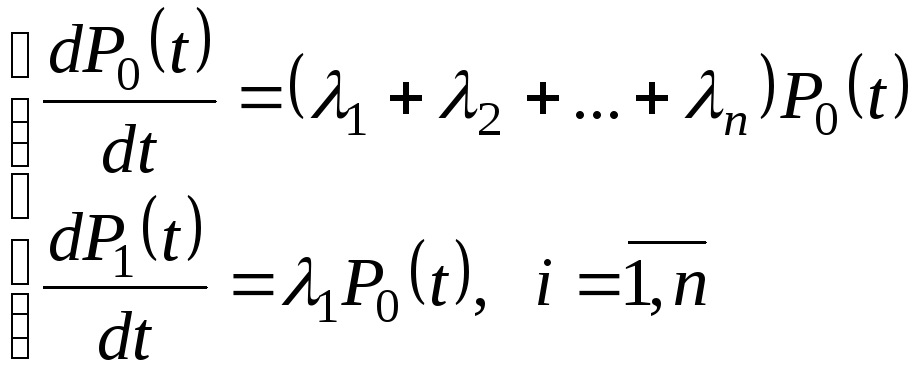
![]() ри
начальных условиях
P0(0)
= 1, Pi(0)
= 0,
ри
начальных условиях
P0(0)
= 1, Pi(0)
= 0,
P0(t) = e-λt,
где λ = λ1 + λ2 + ... +λn - интенсивность отказа системы.
Схема размножения и гибели
Ф ункционирование
большого числа СМО можно описать графом,
приведенным на рис.3.4. Особенность этого
графа состоит в том, что в нем любое Zi
состояние связано ветвями лишь с
соседними Zi-1
и Zi+1
состояниями, а начальное состояние Z0
и конечное Zn
- только с одним соседним состоянием.
ункционирование
большого числа СМО можно описать графом,
приведенным на рис.3.4. Особенность этого
графа состоит в том, что в нем любое Zi
состояние связано ветвями лишь с
соседними Zi-1
и Zi+1
состояниями, а начальное состояние Z0
и конечное Zn
- только с одним соседним состоянием.
λ0,1 λ1,2 λn-1,n
μ0,1 μ2,1 μn,n-1
 Рис.3.4.
Рис.3.4.
Н а
схеме
обозначены: λi,
i +1,
i=0,n-1 -
интенсивности потока заявок на
обслуживание; μi,
i -1,
i=1,n -
интенсивности потока обслуженных заявок
или просто интенсивности обслуживания
потока заявок. Такая модель СМО применялась
при решении биологических задач, в
частности, изучения закономерностей
изменения численности популяций. В этих
задачах λ - интенсивность размножения
особей, а μ - интенсивность их гибели.
Отсюда и термин “схема размножения и
гибели”.
а
схеме
обозначены: λi,
i +1,
i=0,n-1 -
интенсивности потока заявок на
обслуживание; μi,
i -1,
i=1,n -
интенсивности потока обслуженных заявок
или просто интенсивности обслуживания
потока заявок. Такая модель СМО применялась
при решении биологических задач, в
частности, изучения закономерностей
изменения численности популяций. В этих
задачах λ - интенсивность размножения
особей, а μ - интенсивность их гибели.
Отсюда и термин “схема размножения и
гибели”.
Д ля
определения вероятностей состояний
Z0,Z1,...,Zn
составляется система уравнений,
описывающих функционирование СМО:
ля
определения вероятностей состояний
Z0,Z1,...,Zn
составляется система уравнений,
описывающих функционирование СМО:
λ01
Из первого уравнения этой системы P1 = ---- P0. Подставляя во второе уравнение μ10 μ10
вместо Р0 значение Р0= ----- P1, получим λ1,2P1 = μ2,1P2 .
λ01
Аналогично λ2,3P2 = μ3,2P3 ; ... ; λk -1,kPk-1 = μk,k –1Pk ; ... ; λn –1,nPn-1 = μn,n –1Pn
Тогда система уравнений примет вид:
И з
этой системы вероятности Р1,Р2,...Рn
выражаются через вероятность Р0:
з
этой системы вероятности Р1,Р2,...Рn
выражаются через вероятность Р0:
λ0,1 λ1,2 λ0,1λ1,2 λ0,1λ1,2λ2,3
P1 = ---- P0; P2 = ---- P1 = -------- P0; P3 = -------------P0;
μ1,0 μ2,1 μ1,0μ2,1 μ1,0μ2,1μ3,2
........
λ0,1λ1,2 ... λn-1,n
Pn = ------------------P0. (3.8)
μ0,1μ2,1 ... μn,n-1
λ0,1 λ1,2 λn-1,n
Обозначая --- = ρ ; ---- = ρ2 ; ... ; ------ = ρn,
μ0,1 μ2,1 μn,n-1
где ρi передача i-й ветви или приведенная интенсивность потока заявок. Теперь для определения вероятности Р0 в системе воспользуемся нормировочным условием Р0+Р1+...+Рn=1.
Подставляя в это уравнение значения Р1,Р2,...,Рn из (3.8), окончательно получим
P0 = (1 + ρ1 + ρ1ρ2 + ... + ρ1ρ2...ρn)-1 (3.9)
П одставляя
Р0
в каждое из уравнений системы, получим
формулы для всех состояний системы. Они
имеют вид:
одставляя
Р0
в каждое из уравнений системы, получим
формулы для всех состояний системы. Они
имеют вид:
ρ1ρ2...ρkP0; k = 1,n.
Ф о р м у л ы Л и т т л а. Литтл получил зависимости между временем пребывания заявки в системе или в очереди и средним их числом в системе или очереди. Приводим эти замечательные формулы без доказательства
![]()
- среднее время пребывания заявки соответственно в системе и в очереди;
Z


 смо,
lоч
- среднее число заявок соответственно
в СМО и в очереди; λ - интенсивность
потока заявок.
смо,
lоч
- среднее число заявок соответственно
в СМО и в очереди; λ - интенсивность
потока заявок.
Формулы (3.10) справедливы для любой СМО без потерь заявок при любом распределении времени обслуживания и любой дисциплине обслуживания.
Примечание
Терминология и обозначения
В теории массового обслуживания используются специальные термины и символы для обозначения СМО. СМО обозначается тремя символами: первый указывает тип входящего потока; второй указывает тип потока обслуживания; третий показывает число каналов СМО.
Для обозначения потоков заявок приняты следующие сокращения:
М – простейший (марховский) поток с экспоненциальной функцией распределения времени между отдельными заявками, а также простейший поток обслуживания;
D – детерминированный входящий поток и детерминированный поток обслуживания;
Е – эрланговские потоки обслуживания и входящий;
G – произвольные потоки заявок в системе;
GI – рекуррентные потоки заявок в системе;
Число каналов обозначается цифрой, например: М/М/1 – одноканальная СМО с простейшими потоками.