

Лекция 4 Геометрия двухмерных кривых
Кроме пространственных линий, для нас практическое значение будут иметь двухмерные кривые на плоскости. В частности, двухмерным пространством будет служить область параметров поверхностей.
Рассмотрим
случай двухмерной кривой. Пусть на
плоскости определена декартова
прямоугольная система координат с
началом в точке О
и базисными векторами е1
и е2.
Компоненты двухмерных векторов будем
обозначать через х
и у.
Большинство формул для двухмерных
кривых можно получить из соответствующих
формул для пространственных кривых,
положив в них третью координату равной
нулю и опустив ее и все векторы,
ортогональные плоскости кривой (в их
числе бинормаль). Радиус-вектор двухмерной
кривой
![]() будет описываться выражением
будет описываться выражением
![]() (55)
(55)
Для двухмерной кривой r(s) формулы Френе-Серре имеют вид:
![]() (56)
(56)
где t = dr/ds – касательный вектор кривой, s – длина дуги кривой. Кривизна двухмерной кривой определяется равенством:
![]() (57)
(57)
Натуральное уравнение двухмерной кривой выражает ее кривизну как функцию дуги вдоль кривой и имеет вид:
![]()
Чтобы
сохранить справедливость всех приведенных
выше формул, следует переопределить
операцию векторного произведения для
двухмерных векторов. Результатом
векторного произведения двухмерных
векторов
![]() и
и
![]() будем считать скалярную величину, равную
будем считать скалярную величину, равную
![]() (58)
(58)
Выразим через координаты х и у производную длины дуги и кривизну двухмерной кривой,
![]() (59)
(59)
![]() (60)
(60)
Эволюта и эвольвента. Для каждой обыкновенной точки кривой можно указать центр кривизны. Геометрическое место центров кривизны всех точек данной кривой называется эволютой этой кривой. Выражение для радиус-вектора эволюты a(t) получим, добавив к радиус-вектору кривой r(t) вектор нормали, деленный на кривизну кривой:
![]() (61)
(61)
При произвольной параметризации кривой получим:
![]() (62)
(62)
Для
двухмерной кривой
![]() запишем векторное равенство (63) отдельно
для каждой координаты эволюты
запишем векторное равенство (63) отдельно
для каждой координаты эволюты
![]() :
:
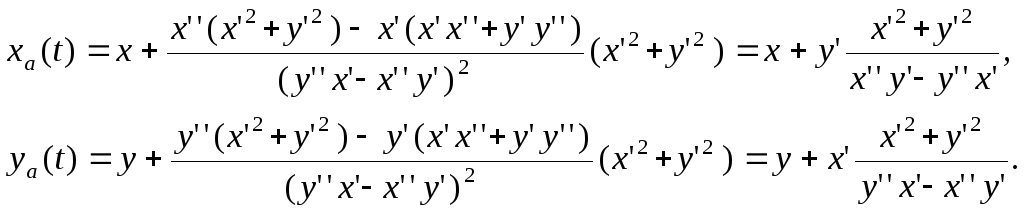 (64)
(64)
В точках распрямления радиус-вектор соответствующей точки эволюты стремится к бесконечности. Если точка распрямления является точкой перегиба, то эволюта терпит в соответствующей точке разрыв. Эволюта в каждой своей точке касается нормали к исходной кривой в соответствующей точке. Эволюту можно определить как огибающую семейства нормалей.
Исходная кривая по отношению к своей эволюте является эвольвентой (разверткой). Для кривой a(s) эвольвента описывается радиус-вектором:
![]() (65)
(65)
где s – длина дуги кривой a(s), s0 = const, t – касательная к кривой. Для заданной плоской кривой можно построить множество эвольвент, в зависимости от s0 (или от того, в какой точке кривой принять длину дуги равную нулю). На рис. 12 показана кривая a(s) и ее эвольвента.
Эвольвента строится следующим образом. Положим, что длина дуги кривой a(s) отсчитывается от точки С0. Для получения точки М эвольвенты, соответствующей некоторой точке Ci исходной кривой, построим в точке Ci касательную и отложим на ней с учетом знака отрезок длиной, равной длине
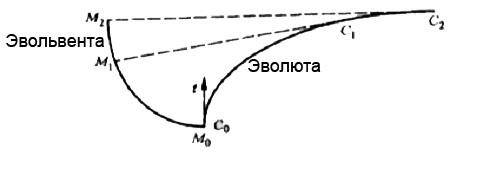
Рис. 12. Эволюта и эвольвента
дуги СiC0, взятой с отрицательным знаком, если значение параметра в точке Сi больше значения параметра в точке С0, и взятой с положительным знаком в противном случае. Можно сказать, что эвольвента представляет собой развертку исходной кривой.
Для доказательства равенства (65) покажем, что эволюта кривой r(s) есть кривая a(s). Заметим, что параметр s является длиной дуги кривой a(s), но не является длиной дуги для эвольвенты r(s), поэтому радиус-вектора эволюты выразится правой частью формулы (63). Подставим в формулу эволюты (63) значения векторной функции r и ее производных, выраженные через векторную функцию а и ее производные по параметру s:
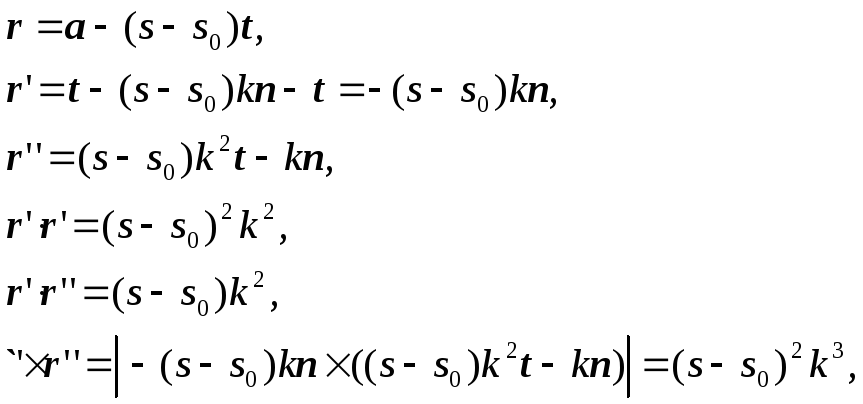
где s – длина дуги кривой a(s), k – ее кривизна, n – главная нормаль и t – касательная кривой a(s). В результате получим:
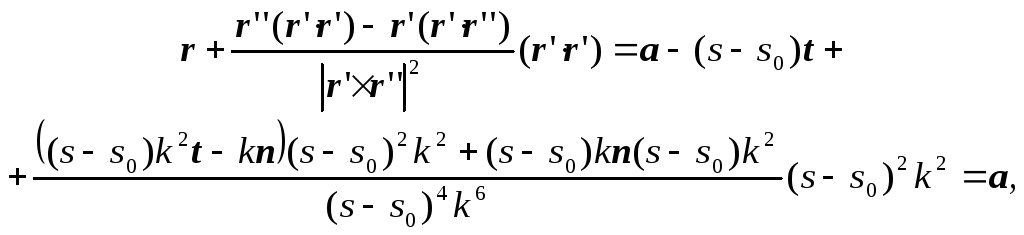
что и требовалось доказать.