

3.7. Режим "высота"
Для забезпечення стабілізації геометричної висоти польоту в діапазоні від 5 до 100 м в САУ передбачений режим "ВЫСОТА" .В цьому режимі закон керування спільним шагом несучого гвинта має вигляд:
Сигнал
управління
 ,
що формується блоком
,
що формується блоком
БСВ-24 по сигналам РВ і ДИСС. У вхідному сигналі з радіовисотоміра мають місце імпульсні викиди випадкового характеру тривалістю порядку секунди. По цій причині сигнал з РВ пропускається через фільтр, що має передаточну функцію
Інерційність,
що вноситься фільтром, компенсується
сигналом
![]() ,що
має форсуючу властивістю по відношенню
до сигналу
,що
має форсуючу властивістю по відношенню
до сигналу
![]() .
Фільтр зібраний на магнітному підсилювачі
УМ3 блоку БСВ, схоплені жорсткою і
ємнісною зворотними зв’язками. На вхід
УМ3 поступають сигнали
.
Фільтр зібраний на магнітному підсилювачі
УМ3 блоку БСВ, схоплені жорсткою і
ємнісною зворотними зв’язками. На вхід
УМ3 поступають сигнали
![]() з
радіовисотоміра і форсуючий сигнали
з
радіовисотоміра і форсуючий сигнали
![]() з
ДИСС. З виходу фільтра сигнал
з
ДИСС. З виходу фільтра сигнал
![]() надходить
на вхід схеми узгодження, яка формує
сигнал
надходить
на вхід схеми узгодження, яка формує
сигнал
![]() .
.
![]() –
заданий сигнал, що утворюється схемою
узгодження, відносно якого здійснюється
стабілізація.
–
заданий сигнал, що утворюється схемою
узгодження, відносно якого здійснюється
стабілізація.
На вхід схеми подаються в певному співвідношенні три сигнали:
![]() –
напруга
позитивної полярності, пропорційна
поточній висоті
–
напруга
позитивної полярності, пропорційна
поточній висоті![]() ;
;
![]() –
опорна
напруга, пропорційна геометричній
висоті
–
опорна
напруга, пропорційна геометричній
висоті
![]() 100
м, але з протилежним знаком, негативна
напруга;
100
м, але з протилежним знаком, негативна
напруга;
![]() –
напруга
перетворювача "код-аналог"
позитивної полярності.
–
напруга
перетворювача "код-аналог"
позитивної полярності.
При
ввімкненні режиму "ВЫСОТА" з УМ3
на схему узгодження надходить сигнал![]() ,і
вона починає свою роботу.
,і
вона починає свою роботу.
Алгебраїчна
сума напруг
![]() в
перший момент завжди негативна, так як
перетворювач "код-аналог" перед
виключенням скидається в нуль і
в
перший момент завжди негативна, так як
перетворювач "код-аналог" перед
виключенням скидається в нуль і
![]() дорівнює нулю, а
дорівнює нулю, а
![]() в
діапазоні стабілізованих висот завжди
по модулю більше
в
діапазоні стабілізованих висот завжди
по модулю більше
![]() .
.
Негативна
напруга на вході нуль-органа призводить
до запуску симетричного мультивібратора,
який видає на вхід тригерного лічильника
прямокутні імпульси позитивної
полярності. Тригерна схема лічильника,
що виконує функцію перетворювача
"код-аналог", видає сигнал
![]() позитивної полярності, який при
апроксимації можна уявити як монотонно
зростаючу функцію часу. Не більш як
через 40 мс після ввімкнення, настає
момент, коли сигнал
позитивної полярності, який при
апроксимації можна уявити як монотонно
зростаючу функцію часу. Не більш як
через 40 мс після ввімкнення, настає
момент, коли сигнал
![]() стане
рівним нулю. Нуль-орган, що представляє
собою підсилювач постійного струму .
працює в релейному режимі без зворотного
зв'язку й володіючи більшим коефіцієнтом
підсилення по напрузі, спрацює й видасть
сигнал позитивної полярності , що
відключає мультивібратор, перетворювач
“код-аналог” припинить рахування
імпульсів, при цьому його вихідна
напруга залишається на досягнутому
рівні й буде виконувати разом з напругою
Vоп
функцію
пам'яті величини Vрв
, що була в момент включення режиму:
стане
рівним нулю. Нуль-орган, що представляє
собою підсилювач постійного струму .
працює в релейному режимі без зворотного
зв'язку й володіючи більшим коефіцієнтом
підсилення по напрузі, спрацює й видасть
сигнал позитивної полярності , що
відключає мультивібратор, перетворювач
“код-аналог” припинить рахування
імпульсів, при цьому його вихідна
напруга залишається на досягнутому
рівні й буде виконувати разом з напругою
Vоп
функцію
пам'яті величини Vрв
, що була в момент включення режиму:
Vоп – Vпр = Vрв = Vрвз
Відносно Vрвз буде вироблятися сигнал ΔV = Vрв – Vрвз пропорційний неузгодженості ΔΗрв = Ηрв – Ηрвз .
З виходу схеми узгодження сигнал ΔΗрв надходить на вхід магнітного підсилювача УП1 через потенціометр МΔΗрв , що регулює необхідний масштаб сигналу. З виходу УП1 сигнал ΔΗрв обмежується стабілітронами Д1, Д2 і надходить на вхід підсилювача УП2 . Обмеження забезпечує максимальну вертикальну швидкість переміщення не більше 3 м/с, що необхідно для забезпечення безпеки при польоті на малих висотах.
Одночасно із сигналом ΔΗрв на магнітний підсилювач УП2 надходить через потенціометр КWy сигнал вертикальної складової швидкості з ДИСС - Wy . Сумарний сигнал з виходу УП2 через змінний резистор КΔΗ надходить на вхід підсилювача сервопривода каналу управління загальним шагом несучого гвинта в пульт ПУ-В.
Підсилювач УП2 охоплений ємнісним зворотним зв'язком й являє собою фільтр із передатною функцією:
ТНрв = 0,76 с.
фільтр послаблює сигнали, частота яких вище 0,25 Гц і служить для зменшення перешкод і згладжування пульсацій сигналу ΔΗрв .
У блоці БСВ-24 є окреме стабілізоване джерело живлення, що видає в схему узгодження сигнал Vоп й забезпечуючи роботу елементів схеми узгодження.
Крім того з додаткового джерела живлення постійного струму ± 15В БСВ—24 живеться потенциометричний датчик вертикальної складової шляхової швидкості Wy.
ДЕМПФЕРИ КОЛИВАНЬ І АВТОМАТИ СТІЙКОСТІ
Демпфером називається автоматичний пристрій, призначений для підвищення стійкості й поліпшення керованості ЛА шляхом штучного збільшення його моментів, що демпфірують, щодо відповідних осей. Це досягається відхиленням кермових поверхонь у напрямку, необхідному для створення моментів, спрямованих назустріч самовільному обертанню ЛА без втручання льотчика.
Застосування демпферів зумовлене тим, що в силу обмежених можливостей людини по швидкодії й по кількості інформації, її сприймання і обробки, льотчик може здійснювати керування лише при певних характеристиках ЛА. Демпфери, поліпшуючи характеристики стійкості й керованості ЛА, що дозволяє істотно розширити можливості ручного керування.
Через важливість завдань, розв'язуваних демпферами, до них пред'являються тверді вимоги відносно частотних характеристик, надійності роботи й збереження природності керування ЛА. Власна частота контуру демпфування повинна бути в 7-10 разів вище можливої частоти коливань ЛА по даному каналі. Висока надійність досягається використанням уніфікованих елементів, здатних до тривалої безвідмовної роботи, і дублюванням основних блоків демпферів. Для збереження природності керування ЛА контур автоматичного демпфування створюється таким, що льотчик не відчуває його роботу.
Більшість сучасних демпферів мають закон управління виду
δр=Кωріωі
де δр — відхилення руля під дією виконавчого органа демпфера;
Кωрі — передаточне число, що має розмірність градус відхилення руля на градус за секунду кутової швидкості літака;
ωі — кутова швидкість ЛА навколо відповідної осі.
Кутові швидкості обертання ЛА виміряються датчиками кутових швидкостей (ДУС), виконаними на базі гіроскопів із двома ступенями волі.
Сигнал з ДУС надходить у релейно-підсилювальний блок (РУБ), що являє собою магнітно-релейний підсилювач. Першим каскадом є диференціальний магнітний підсилювач, охоплений для підвищення чутливості до вхідного сигналу позитивним зворотним зв'язком по вихідному струмі. Другий і третій каскади підсилювача виконані на поляризованому реле РПС-5 і силових реле Р1 і Р2 відповідно.
Релейно-підсилювальний блок управляє роботою виконавчого електромеханізму демпфера, називаного рульовим агрегатом управління (РАУ), що переміщує золотник бустера й забезпечує відхилення руля в необхідному напрямку. У більшості демпферів й у деяких автопілотах застосовується кермовий агрегат типу РАУ-107М різних варіантів. Він являє собою електромеханічну розсувну тягу, установлювану в розрив проводки ручного керування ЛА між завантажувальним механізмом і бустером (гідропідсилювачем) відповідного керма.
Основними елементами РАУ (рис. 8.5) є електродвигун постійного струму незалежного збудження, понижуючий редуктор 2, ходовий гвинт 3, висувний шток 4 із внутрішнім різьбленням, кінцеві вимикачі 5, ламельний пристрій 6, потенціометр зворотного зв'язку 7, гальмова електромагнітна муфта 8, корпус 9.
РАУ-107М має швидкість руху штока 80 мм/с, розрахований на номінальне навантаження 4 кгс, але в режимі перевантаження долає опір до 16 кгс. Розвантажуюче осьове зусилля для кермового агрегату дорівнює 1600 кгс.
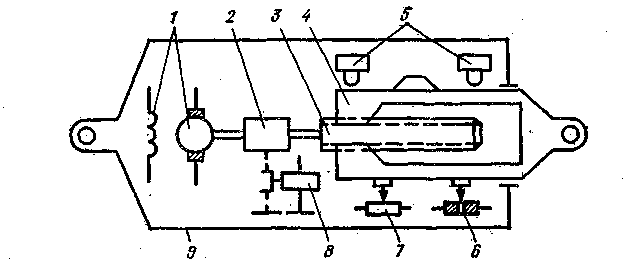
Рис. 8.5. Рульовий агрегат управління (РАУ):
1 — електродвигун; 2 — редуктор; 3 — ходовий гвинт; 4 — висувний шток; 5 — кінцеві вимикачі; 6 — центруючий ламельний пристрій; 7 — потенціометр зворотного зв'язку; 8 — електромагнітна муфта; 9 — корпус
Хід штока РАУ обмежується кінцевими вимикачами й механічними упорами в редукторі й міняється залежно від варіанта. Максимальний хід по кінцевих вимикачах ±15±1 мм, по механічних упорах ±18 мм. Таке дублювання засобів обмеження ходу вихідного штока обумовлено небезпекою відмови демпфера, при якому шток може переміститися на величину більше припустимої.
При швидкості штока 80 мм/с кермова поверхня відхилиться на максимальний кут за час менший за одну секунду. За такий час льотчик не встигне зреагувати й втрутитися в управління ЛА. Для запобігання зазначеної небезпеки хід штока роблять таким, щоб при постановці його на упор, відхилення руля не перевищувало 20-25% максимально можливої величини. Це досягається установкою в необхідне положення кінцевих вимикачів й упорів.
Через обмеженість ходу штока РАУ необхідно перед включенням демпфера в роботу встановити шток у середнє положення, інакше не буде відбуватися демпфування коливань ЛА в одному з напрямків від необхідного положення. Для центрування штока РАУ оснащено ламельним пристроєм 6.
У статичному положенні гвинтова передача РАУ є саморегулююча й не допускає переміщення вихідного штока під дією навантаження. Однак при наявності вібрацій, неминучих на ЛА, сили тертя зменшуються й умова самогальмування може порушитися. Щоб уникнути мимовільного руху штока під дією навантаження, у редукторі РАУ передбачений спеціальний стопор, що під дією пружини входить у зчеплення з однієї із шестірень редуктора при вимиканні демпфера. У момент включення живлення демпфера електромагніт виводить стопор із зчеплення з шестірнею, звільняючи редуктор від гальмування.
У зв'язку з великим діапазоном висот і швидкостей польоту сучасних ЛА характеристики їхньої стійкості й керованості не залишаються постійними, а змінюються в широкому діапазоні залежно від режимів польоту. Для забезпечення ефективної роботи в будь-яких умовах польоту авіаційні демпфери мають спеціальні коригувальні пристрої, що змінюють передаточні числа по керуючих сигналах. Ця корекція здійснюється зазвичай у функції швидкісного напору q = ρ*V2/2 тобто в залежності від висоти й швидкості польоту.
Автоматичне демпфування коливань ЛА може здійснюватися по одній або декількох його осей. Залежно від цього демпфери бувають одноканальні, двухканальні й триканальні. Так, демпфери (автомати парирування) АП-106 і ДР-23 демпфують коливання ЛА по куту рискання, Д-2ДО-1Ю - по куті нишпорення й тангажа, Д-ЗК-ПО -по куту нишпорення, тангажа й крену, Д-2К-П5 - по куті нишпорення й крену, ДТ-105А и ДТ-128 - по куті тангажа.
Через ідентичність побудови структурних схем авіаційних демпферів й уніфікації їхніх основних елементів досить розглянути докладно роботу одного з них, указавши далі відмінні риси інших.
Рис 1.10. Схема двофазного індукційного двигуна.
Системи поліпшення стійкості й керованості
1. Автомати регулювання керування. Так прийнято називати автоматичні пристрої, які, будучи включеними в механічну систему керування органами управління, змінюють її параметри для того, щоб забезпечити однакову техніку пілотування літаком на різних режимах польоту.
Коли ми говорили про керованість літака, то не зачіпали участі льотчика в процесі керування, тобто думали вихідним моментом керування відхилення кермової поверхні. У дійсності ж керованість варто починати розглядати з відчуттів льотчика, що виникають при переміщенні їм важелів керування. Літна практика показує, що при впливі на важелі керування льотчик краще почуває зусилля на важелі, ніж його переміщення. Виниклий же при керуванні маневр літака він сприймає у вигляді кутової швидкості обертання або перевантаження. Для льотчика зручно, якщо літак на всіх режимах польоту буде відповідати приблизно однаковою реакцією по кутовій швидкості або перевантаженню на те саме керуюче зусилля.
Для поздовжнього керування надзвуковими літаками найбільш характерним параметром є нормальне перевантаження, а при бічному керуванні (по крені) і поздовжнім керуванні важкими дозвуковими літаками льотчик краще сприймає кутову швидкість обертання.
Тому що автомати регулювання керування знайшли найбільше застосування в каналах поздовжнього керування винищувачів, надалі обмежимося розглядом саме цього випадку.
Якщо не брати до уваги динаміку керування перевантаженням, а розглядати тільки її стале значення при певних впливах льотчика, то ми будемо мати справу з так називаними статичними характеристиками керованості, які задаються у вигляді градієнтів, що характеризують зусилля на ручці керування АР або її переміщення Ах, необхідні для збільшення перевантаження на одиницю, тобто коефіцієнтів
Літна
практика показує, що найкращими
значеннями зазначених
параметрів для винищувача є:
![]() ,
,
![]() .
Підтримка незмінними цих значень при
зміні режиму польоту і є головним
завданням автоматів регулювання
керування (АРУ).
.
Підтримка незмінними цих значень при
зміні режиму польоту і є головним
завданням автоматів регулювання
керування (АРУ).
Типова схема механічної системи керування легкого надзвукового літака включає наступні основні елементи (рис. 11.12): ручку керування (РУ), завантажувальний механізм (ЗМ), механізм триммирования (МТ), що функціонує при натисканні кнопки «Триммер» (Кн.), механічні тяги й необоротний гідропідсилювач - рульовий привід (РП).
При керуванні через необоротний гідропідсилювач весь шарнірний момент рулячи (або поворотного стабілізатора) сприймається кермовим приводом і льотчик на відміну від прямого керування (без гідропідсилювача) не почуває зусиль на ручці,
створюваних кермом. Необхідне завантаження ручки при її відхиленні забезпечується пружинним завантажувальним механізмом. Зняття зусиль із ручки при її установці в балансувальне положення здійснюється переміщенням точки опори пружини за допомогою електромеханізму триммирования.
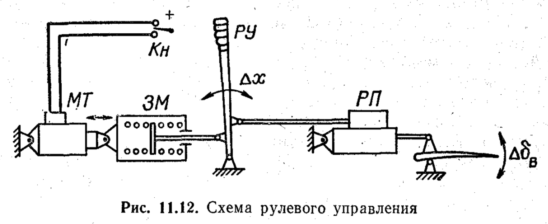
У цій системі керування, де всі елементи кінематичної схеми постійні, при відхиленні ручки на Ах виникають цілком певні зусилля й відхилення рулячи висоти:
![]() (11,6)
(11,6)
де
![]() —
жорсткість пружини,
—
жорсткість пружини,![]() —
механічний коефіцієнт передачі
гідропідсилювача.
—
механічний коефіцієнт передачі
гідропідсилювача.
Для з'ясування необхідності включення АРУ в цю систему керування розглянемо більш докладно залежність перевантаження, що виникає при відхиленні рулячи висоти, від зміни режиму польоту, а саме: висоти Н и швидкісного напору q. Вище було показано, що при відхиленні рулячи висоти починається зміна кута атаки, що припиняється при рівності керуючого моменту рулячи й моменту статичної стійкості (для простоти тут зневажимо моментом, що демпфірує). З рівності
![]() з
урахуванням формул (11.3) і (11.5) випливає
з
урахуванням формул (11.3) і (11.5) випливає
 (11.7)
(11.7)
Звідси, використавши вираження (11-2), легко одержати залежність, що цікавить нас
(11.8)
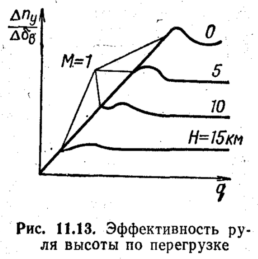
З рис.
11.11 видно, що на дозвукових швидкостях
польоту коефіцієнти
![]() ,
,
![]() ,
,![]() приблизно
постійні, тому відношення
приблизно
постійні, тому відношення
![]() при
при
![]() лінійно
залежить від швидкісного напору (рис.
11.13).
лінійно
залежить від швидкісного напору (рис.
11.13).
У
надзвуковій області режимів ріст
швидкості викликає збільшенню![]() й
зменшенню
й
зменшенню
![]() ,
,![]() , що, як видно з
формули (11.8), забезпечує компенсацію
збільшення швидкісного напору, і
відношення
, що, як видно з
формули (11.8), забезпечує компенсацію
збільшення швидкісного напору, і
відношення
![]() мало залежить від величини
q
(майже
горизонтальні ділянки графіка на рис.
11.13). Тому що досягнення швидкості звуку
(М=1) на різних висотах відбувається при
різних швидкісних напорах (через зміну
щільності повітря
мало залежить від величини
q
(майже
горизонтальні ділянки графіка на рис.
11.13). Тому що досягнення швидкості звуку
(М=1) на різних висотах відбувається при
різних швидкісних напорах (через зміну
щільності повітря
![]() ),
те кожній висоті польоту відповідає
своя горизонтальна ділянка
),
те кожній висоті польоту відповідає
своя горизонтальна ділянка
![]() .
.
Проведений
аналіз показує, що на різних режимах
польоту тому самому відхиленню рулячи
висоти
![]() відповідають
досить різні збільшення перевантажень
відповідають
досить різні збільшення перевантажень
![]() >
а
це
приведе до поганої статичної керованості,
якщо використати схему керування рис.
11.12 з постійними параметрами. Отже,
необхідно змінювати або твердість
пружини, або коефіцієнт передачі від
ручки до керма для того, щоб при тому
самому зусиллі
>
а
це
приведе до поганої статичної керованості,
якщо використати схему керування рис.
11.12 з постійними параметрами. Отже,
необхідно змінювати або твердість
пружини, або коефіцієнт передачі від
ручки до керма для того, щоб при тому
самому зусиллі
![]() кермо
висоти відхилявся на різну величину
залежно від режиму польоту й цим самої
компенсував мінливість відносини
кермо
висоти відхилявся на різну величину
залежно від режиму польоту й цим самої
компенсував мінливість відносини
![]() .
.
Найкращим варіантом такого регулювання є одночасна зміна й твердості пружини, і коефіцієнта передачі, тому що при цьому кожний із зазначених параметрів повинен змінюватися в меншому діапазоні.
Одна з
можливих схем АРУ показана на рис.
11.14, де як регулюючі пристрої застосовані
електромеханізми, що змінюють довжини
плечей важелів
![]() й
й
![]() .
Необхідна програма зміни цих плечей у
функції
q
й
H може
бути визначена з умови сталості відносини
.
Необхідна програма зміни цих плечей у
функції
q
й
H може
бути визначена з умови сталості відносини
![]() ,
що
еквівалентно сталості коефіцієнт
,
що
еквівалентно сталості коефіцієнт
![]() ,
Запишемо
очевидну рівність
,
Запишемо
очевидну рівність
 (11.9)
(11.9)
З рис. 11.14 треба, що

Підставивши ці вираження в (11.9), одержимо
 ,
,
де lРП/а-коефіцієнт передачі важеля на кермовий привід; lзм/b- коефіцієнт передачі важеля на завантажувальний механізм; KРП/ƒЗМ - постійна для даної схеми величина
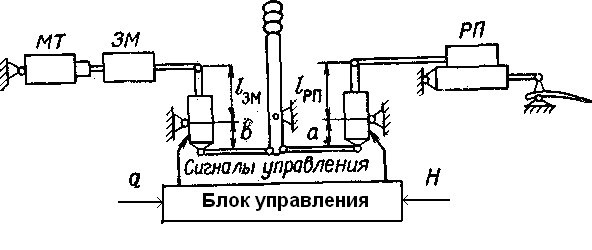
Рис.11.14
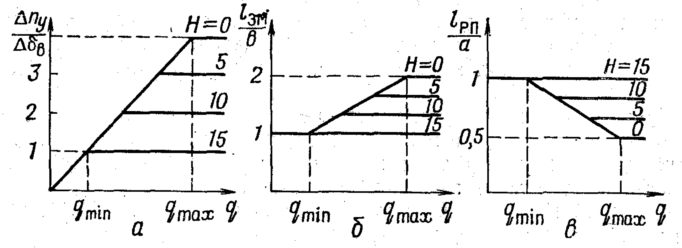
Рис.11.15
Тепер, якщо апроксимувати залежність Δny/ΔδB прямими лініями, як це показано на рис. 11.15. а, легко можна вибрати дві однотипні прості програми зміни коефіцієнтів lРП/a та lЗМ/b(див. рис.11.15 б, в), які з гарним ступенем наближення компенсують зміну Δny/ΔδB і забезпечать зразкова сталість коефіцієнта Δny/ΔР, у чому можна переконатися простою перевіркою хоча б крайніх точок робочого діапазону швидкісних напорівqmin та qmax.
Електрична
схема АРУ
містить
задатчик програми, підсилювач потужності
(УМ),
електродвигун
і ланцюги зворотнього зв'язку (рис.
11.16). Інформація про висоту й швидкісний
напір надходить у вигляді повного рп
і статичного рст
тисків від ПВД
літака,
причому вимір швидкісного напору
звичайно здійснюється приблизно по
динамічному тиску рД=рп-рст
Зі збільшенням динамічного тиску
мембранна
коробка (МК)
розширюється й переміщає повзунок
задатчика програми відповідно до
похилої ділянки (рис.11.15 б, в). Обмеження
цього переміщення залежно від висоти
польоту відбувається за
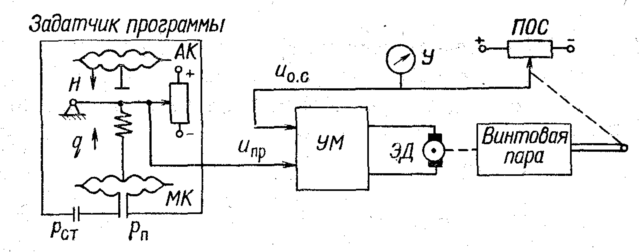 рахунок
зміни розміру анероїдної коробки (АК
на рис.11.16) і пов'язаного з нею упору, що
перешкоджає руху повзунка від мембранної
коробки.
рахунок
зміни розміру анероїдної коробки (АК
на рис.11.16) і пов'язаного з нею упору, що
перешкоджає руху повзунка від мембранної
коробки.
Сигнал задатчика надходить на підсилювач і забезпечує обертання електродвигуна й вихідного штока електромеханізму доти, поки сигнал датчика зворотного зв'язку не компенсує вхідний сигнал задатчика програми. Таким чином, ця схема є типовою системою, що стежить, у якій здійснюється синхронна зміна довжини вихідного штока слідом за переміщенням повзунка задатчика програми. Роботу АРУ льотчик може контролювати по покажчику (В). У деяких АРУ при відмовах блоку керування передбачене ручне керування електромеханізмом від спеціального перемикача.
2, Демпфери коливань літака. На деяких режимах польоту (особливо на більших висотах) аеродинамічні моменти, що демпфірують, малі. У цьому випадку при відхиленні рулів або ж дії зовнішніх збурювань виникають кутові коливання літака. Звичайно частоти цих коливань такі, що льотчик не встигає відхиленням рулів парирувати їх, а навпаки, ще більше розгойдує літак. При цьому пілотування літака представляє для льотчика складну, а іноді й нездійсненне завдання.
Демпфуючі властивості літака можна поліпшити штучно застосуванням автоматичних пристроїв, називаних демпферами коливань літака. Демпфер коливань забезпечує автоматичне відхилення рулячи на кут, пропорційної кутової швидкості обертання літака щодо відповідної осі. Створюваний при цьому момент рулячи точно так само, як і момент природного демпфірування, спрямований протилежно кутової швидкості обертання літака й парирує це обертання.
Демпфери можуть встановлюватися в каналі керування кожною управляючою поверхнею літака. Відхилення демпфером управляючої поверхні визначається законом управління, що записується, наприклад, для демпфера тангажу, так:
δРАв=Кωzвωz
Тут δРАв — кут відхилення руля висоти рульовим агрегатом (РА) демпфера; Кωzв— передаточне число демпфера по кутовій швидкості ωz, яка змінюється в процесі польоту залежно від величини q.
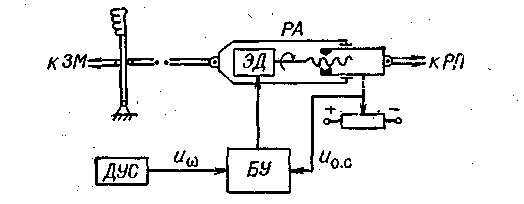
Рис. 11.17. Схема демпфера коливань літака
Рульові агрегати демпферів являють собою електромеханічні розсувні тяги й включаються в проводку керування в послідовній схемі (рис. 11.17). У цій схемі переміщення вхідного золотника гідропідсилювача (а отже, і руля) залежить як від відхилення ручки керування, так і від переміщення штока кермового агрегату. Далі розглянемо роботу демпфера на прикладі демпфера тангажа. Нехай, наприклад, льотчик при керуванні літаком відхилив ручку керування. Під дією керуючого моменту рулячи висоти виникає обертання літака з кутовою швидкістю ωz.
Блок управління (БУ) кермовим агрегатом одержує сигнал кутової швидкості uω від гіроскопічного датчика кутової швидкості (ДУС). У БУ цей сигнал підсилюється відповідно до величини передаточного числа Кωzв і поступає на керування електродвигуном (ЕД) роздвижної тяги. Рух вихідного штока викликає зміна сигналу зворотного зв'язку uоз, що також надходить на вхід БУ й, компенсуючи сигнал uω, забезпечує зупинку електродвигуна при відхиленні штока РА на величину, пропорційну кутової швидкості ωz.
Через наявність сил тертя в рульовій проводці й протидії завантажувального механізму переміщення штока кермового агрегату практично не передається на ручку керування. Тому льотчик не помічає втручання демпфера в керування літаком, а ефект дії демпфера сприймається їм як зміна власних властивостей літака.
Так, якщо без демпфера перехідний процес по кутовій швидкості ωz(t) при відхиленні ручки управління відбувався зі значними коливаннями (крива 1, рис. 11.18), то при працюючому демпфері ці коливання стають істотно меншими (крива 2). Динамічні характеристики керування літаком при цьому поліпшуються.
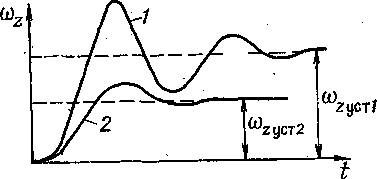
Рис. 11.18. Процес установлення кутової швидкості обертання літака при східчастому відхиленні рулячи висоти
Через те що кермовий агрегат демпфера трохи зменшує відхилення руля від льотчика, стала кутова швидкість ωzуст обертання літака при працюючому демпфері виявляється меншою, ніж без демпфера. Це явище сприймається льотчиком як деяке зменшення ефективності керування, але може бути враховане за рахунок збільшення відхилень ручки.
Аналогічно демпферам улаштовані автомати поздовжньої й шляхової стійкості, які поліпшують ці характеристики літака за рахунок відхилення кермових поверхонь пропорційно кутам атаки або ковзання.