

21. Двухфазная модель ад в раздельных осях статора и ротора
1-й и 2-й недостатки математической модели АД в физических переменных устраняются путем перехода к модели АД, в которой статор и ротор представлены в виде двух взаимно перпендикулярных катушек.
В основе двухфазной модели лежит понятие вращающегося обобщенного вектора. Вектор некоторой совокупности физических сигналов называется обобщенным, если его проекции на выбранные оси являются мгновенными значениями физических сигналов.
На рис.21.1 в верхнем ряду показаны оси трех- и двухфазных обмоток, а в нижнем – эквивалентирование обмоток статора и ротора.
Двухфазные оси
α-β
статора неподвижны в пространстве,
причем ось α
совмещена с осью обмотки 1А
статора. Двухфазные оси d-q
ротора вращаются в пространстве вместе
ротором с частотой ωЭЛ,
причем ось d
совмещена с осью обмотки 2А
ротора. Обобщенный вектор потокосцепления
![]() (или напряжения, или тока) вращается в
пространстве с частотой ω1
напряжения питания статора АД. Проекции
(или напряжения, или тока) вращается в
пространстве с частотой ω1
напряжения питания статора АД. Проекции
![]() на оси обмоток статора являются
мгновенными значениями потокосцеплений
этих обмоток, что доказывается вычислениями
по построениям на рис.21.1:
на оси обмоток статора являются
мгновенными значениями потокосцеплений
этих обмоток, что доказывается вычислениями
по построениям на рис.21.1:
![]() (21.1)
(21.1)

Проекции
![]() на оси α-β
являются мгновенными значениями
потокосцеплений по этим осям, что
доказывается вычислениями:
на оси α-β
являются мгновенными значениями
потокосцеплений по этим осям, что
доказывается вычислениями:
![]() (21.2)
(21.2)
Можно утверждать
обратное, что потокосцепления трехфазных
обмоток, определяемые формулами (21.1), и
потокосцепления двухфазных обмоток,
определяемые формулами (21.2), дают одно
и то же результирующее потокосцепление
![]() статора. Значит, после подмены реальной
трехфазной обмотки на двухфазную с
взаимно-перпендикулярными осями α
и β,
результирующее потокосцепление статора,
которое вращается в пространстве с
частотой ω1,
работа АД не изменится.
статора. Значит, после подмены реальной
трехфазной обмотки на двухфазную с
взаимно-перпендикулярными осями α
и β,
результирующее потокосцепление статора,
которое вращается в пространстве с
частотой ω1,
работа АД не изменится.
Точно также можно заменить трехфазную обмотку ротора, а также многофазную обмотку короткозамкнутого ротора, на двухфазную обмотку с взаимно-перпендикулярными осями d и q. Потокосцепления таких обмоток согласно рис.21.1 вычисляются по формулам:
![]() (21.3)
(21.3)
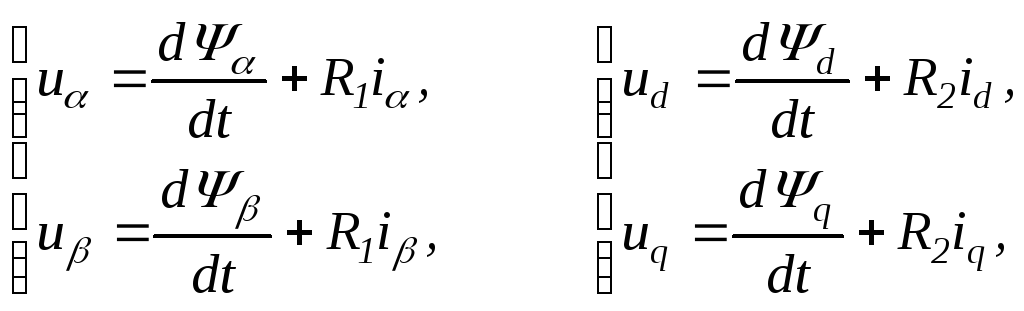
Теперь можно составить систему дифференциальных уравнений для АД с двухфазными обмотками статора и ротора
 (21.4)
(21.4)
где суммарные потокосцепления Ψα, Ψβ, Ψd и Ψq всех четырех двухфазных обмоток с учетом построений на рис.21.1 определятся формулами:
 (21.5)
(21.5)
Напряжения питания uα, uβ, ud и uq двухфазных обмоток изменяются с частотами трехфазного АД - в статоре с частотой ω1, в роторе с частотой ω2.
Преимущества двухфазной модели АД с раздельными осями статора (оси α-β) и ротора (оси d-q):
1) количество дифференциальных уравнений обмоток уменьшилось до 4-х (в трехфазной модели 6 уравнений);
2) количество слагаемых в выражениях полных потокосцеплений обмоток уменьшилось до 3-х (в трехфазной модели 6 слагаемых).
Недостаток только один: выражения потокосцеплений (21.5) являются нелинейными функциями, поэтому и дифференциальные уравнения (21.4) также нелинейные. Решить эти уравнения аналитически невозможно.
22. Двухфазная модель ад в осях u-V, общих для статора и ротора, вращающихся в пространстве с произвольной частотой
Устранить нелинейность в выражениях потокосцеплений и, следовательно, превратить дифференциальные уравнения АД в линейные можно путем:
1) замены обмоток в осях α-β, неподвижных относительно статора, и замены обмоток в осях d-q, неподвижных относительно ротора, на пары обмоток статора и ротора, которые неподвижны относительно осей u-v, вращающихся в пространстве с произвольной частотой;
2 )
изменением частоты напряжений, питающих
обмотки статора и ротора в осях u-v.
)
изменением частоты напряжений, питающих
обмотки статора и ротора в осях u-v.
Двухфазная модель с указанными свойствами приведена на рис.22.1. В исходном двухфазном АД с раздельными осями α-β и d-q:
- на статорную обмотку подаются напряжения uα и uβ с частотой ω1, в результате чего статором создается вращающееся магнитное поле с частотой вращения ω1;
- на роторную обмотку подаются напряжения ud и uq с частотой ω2=sω1, в результате чего в роторе создается вращающееся магнитное поле с частотой вращения sω1, а так ротор вращается с частотой ωЭЛ=ω1(1-s), то в пространстве поле ротора вращается с частотой ω2+ωЭЛ=ω1. Таким образом, поля статора и ротора вращаются в пространстве с одинаковой частотой ω1.
Если взять за основу синхронность вращения полей статора и ротора, то легко обосновать двухфазную модель АД в осях, общих для статора и ротора.
Пусть координатные оси u-v вращаются в пространстве с частотой ωК, и на этих осях расположены обмотки с витками w1u и w1v, заменяющие статор, и обмотки с витками w2u и w2v, заменяющие ротор. Для того, чтобы указанные пары обмоток создавали поля, вращающиеся в пространстве с частотой ω1, к ним нужно подвести напряжения u1u, u1v, u2u и u2v с частотой (ω1-ωК). Напряжения u1u и u1v должны быть сдвинуты между собой на 90о и также на 90о должны быть сдвинуты между собой напряжения u2u и u2v. Между напряжениями u1u и u2u сдвиг устанавливается в зависимости от требуемой величины вращающего момента АД.
Суммарные потокосцепления Ψ1u, Ψ1v, Ψ2u и Ψ2v всех четырех двухфазных обмоток с учетом построений на рис.22.1 определятся линейными относительно токов выражениями:
 (22.1)
(22.1)
В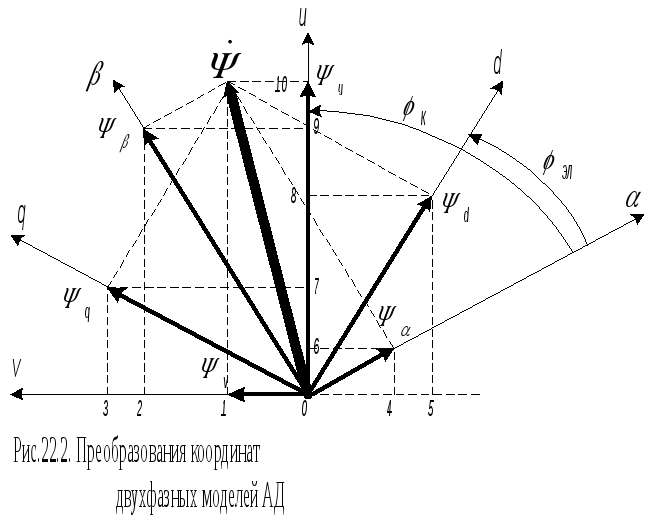 ывод
дифференциальных уравнений обмоток в
осях u-v
производится ниже в теме 23.
ывод
дифференциальных уравнений обмоток в
осях u-v
производится ниже в теме 23.
Если аналитически рассчитаны напряжения, токи и потокосцепления статора и ротора в осях u-v, то возникает задача перехода к этим же величинам, но в осях α-β статора и осях d-q ротора и наоборот. Такой пересчет выполняется с использованием формул преобразования координат, для вывода которых используем построения, приведенные на рис.22.2.
Вывод формул преобразования (u-v) ← (α-β)
Из чертежа следует равенство для проекций на оси u и v:

 (22.2)
(22.2)
В матричном виде
![]() (22.3)
(22.3)
Вывод формул преобразования (α-β) ← (u-v)
Решив (22.3) относительно Ψα и Ψβ , получим
![]() (22.4)
(22.4)
Вывод формул преобразования (u-v) ← (d-q) и (d-q) ← (u-v)
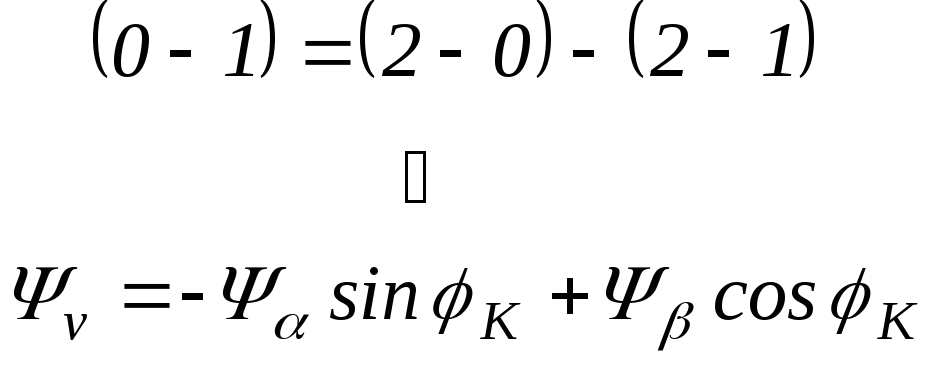
Из чертежа следует равенство для проекций на ось u:
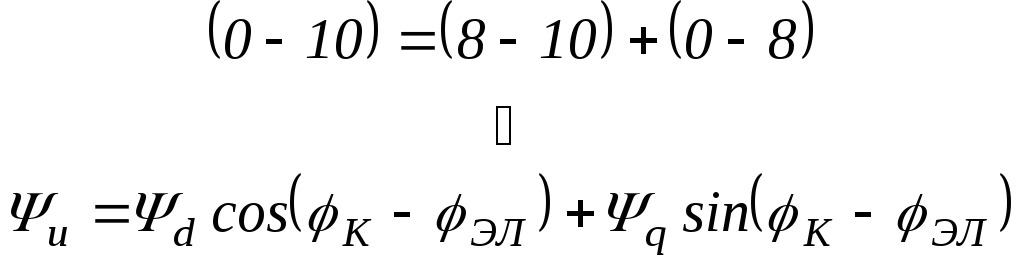
и на ось v: (22.5)
В матричном виде
 (22.6)
(22.6)
и обратно
 (22.7)
(22.7)