

8. Датчики перемещения
Датчики перемещения с изменяющимся активным сопротивлением (потенциометрические датчики)
Применяются в основном как датчики угловых и линейных перемещений.
Потенциометры используются в качестве делителей напряжения.
По виду зависимости между Rx (рис.11,) и величиной x перемещения движка (углом поворота α) различают линейные и функциональные потенциометры.
Линейные потенциометры
Линейные потенциометры весьма широко применяются в устройствах автоматики. Они характеризуются линейной зависимостью Rx = f(x) , которая изображает прямой линией (рис.12).
Зависимость выходного напряжения Uвых от напряжения U, питающего потенциометр, определяется соотношением величин сопротивлений нагрузки и потенциометра.
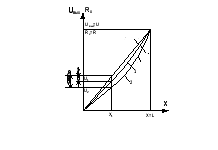 Рис.
11 Рис. 12 (3 - β
, 2 - β =10, 1- β
= 5)
Рис.
11 Рис. 12 (3 - β
, 2 - β =10, 1- β
= 5)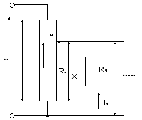
Коэффициент
нагрузки
 ,
если Rн
>> R то
,
если Rн
>> R то
 ,то
током нагрузки можно пренебречь, и
зависимость Uвых
=f (x)
будет также линейной (см. рис.12), если β
уменьшить то линейность нарушится,
самая большая погрешность достигает
при нахождении движка в среднем положении.
,то
током нагрузки можно пренебречь, и
зависимость Uвых
=f (x)
будет также линейной (см. рис.12), если β
уменьшить то линейность нарушится,
самая большая погрешность достигает
при нахождении движка в среднем положении.
Если движок потенциометра перемещать по всей его длине в процессе работы, то расчет такого потенциометра нужно вести на максимальную погрешность, которая определяется выражением:
 (8.1)
(8.1)
Пример 1.
Рассчитать, каким должно быть сопротивление потенциометра, на выходе которого включено электрическое магнитное реле МКУ – 48, сопротивление катушки которого равно 6 кОм и максимальная погрешность которого 2%.
Решение:
Выражение
(8.1) решаем относительно


Сопротивление потенциометра
 Ом.
Ом.
Как
видно из примера с уменьшением
сопротивления потенциометра при данной
нагрузке погрешность его также
уменьшается, а мощность
 и, следовательно, габариты растут.
Поэтому возможность уменьшения
сопротивления потенциометра ограничивается
выходной мощностью аппарата, от которого
питается потенциометр, а также допустимыми
для данной схемы габаритами потенциометра.
и, следовательно, габариты растут.
Поэтому возможность уменьшения
сопротивления потенциометра ограничивается
выходной мощностью аппарата, от которого
питается потенциометр, а также допустимыми
для данной схемы габаритами потенциометра.
Пример 2.
Определить, каким должно быть соотношение величин сопротивлений нагрузки и потенциометра, чтобы максимальная погрешность не превышала 1%.
Решение.
Указанное условие записывается выражением
 ,
,
откуда
 .
.
Таким образом,

Потенциометрические датчики для измерения угловых перемещений характеризуются следующими основными электрическими и конструктивными величинами:
R – полное сопротивление намотки потенциометра;
Р – допустимая мощность, рассеиваемая потенциометром;
ρ – удельное сопротивление материала провода намотки (константан 0,49 Ом*мм2/м, нихром 1,08 Ом*мм2/м);
d – диаметр провода намотки без изоляции;
dи - диаметр провода намотки с изоляцией;
j – допустимая плотность тока;
δв
– разрешающая способность потенциометра,
т. е величина прироста сопротивления
(в относительных единицах или процентах)
при перемещении щетки на один виток;
 принимается обычно не более 0,2 - 0,25 %;
принимается обычно не более 0,2 - 0,25 %;
α – рабочий угол поворота щетки потенциометра; в однооборотных потенциометрах обычно а = 330;
D – средний диаметр окружности каркаса;
L – рабочая длинна каркаса (по окружности);
n – число витков;
τ – шаг намотки;
l – длина витка намотки;
d – толщина каркаса потенциометра;
H – высота каркаса.
Расчетные формулы:
 ; (8.2)
; (8.2)
l = 2(H + b); (8.3)
 ; (8.4)
; (8.4)
 ; (8.5)
; (8.5)
d
=
 мм; (8.6)
мм; (8.6)
 .
(8.7)
.
(8.7)
|
Rx = kx Н = k |
|
|
Rx = kx2 H =2kх
|
|
|
R
= k |
|
|
R = k sin x H = k cos x
|
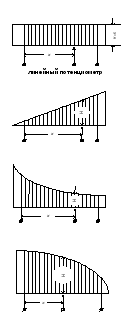
 при
при



Рис.13