

Обобщённая машина
.pdfU~2 |
|
|
|
|
I~2 |
1 |
|
||||
|
|
|
|
|
|
R2 j 2L2 pL2
~
E21
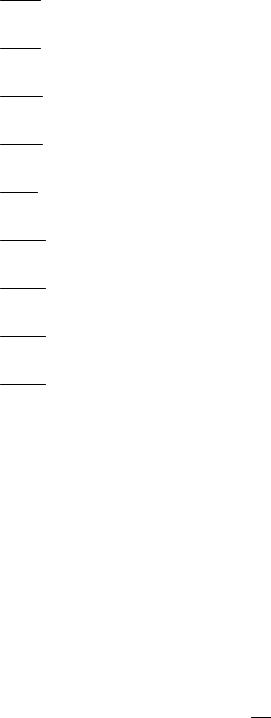
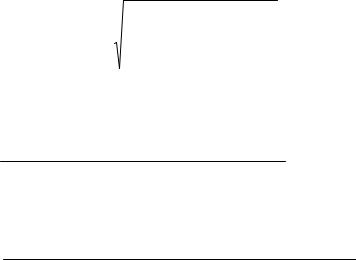
Рис. 3.1. Структурная схема роторной цепи с обратной связью по ЭДС
~ |
|
|
|
|
|
|
I~1 |
|
|
1 |
|
||||
U1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
R1 j 1L1 pL1 |
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
E12 |
|
|
|||
Рис. 3.2. Структурная схема статорной цепи с обратной связью по ЭДС
~ |
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
1 |
|
|||
U1 |
|
|
|
|
I1 |
||||
|
|
|
|
|
|
|
R2 j 2L2 pL2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p j 1 L12 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I~2 |
|
|
|
|
|
Рис. 3.3. Структурная схема статорной цепи с обратной связью по току ротора
U~2 |
|
|
|
I~2 |
|
1 |
|
R2 j 2L2 pL2
p j 2 L21
 I~1
I~1
Рис. 3.4. Структурная схема роторной цепи с обратной связью по току статора
U~1 |
|
U~2 |
|
|
|
||
|
|
|
|
|
1 |
|
|
|
(p j 2 )L21 |
|
|
|
|
||
|
|
|
R2 |
(p j 2 )L2 |
|
||
|
|
|
|
||||
|
|
|
|
|
|||
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
(p j )L |
|
|
|
|
|
|
|
|
pnLm |
|
I1 |
|
|
|
I2 |
Sin 12 |
|
|
|
|
|
|
|
R1 |
(p j 1)L1 |
|
|||||||||||||
1 |
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
~ |
~ |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
I1 |
|
M |
|
|
|
|
|
I |
2 |
||
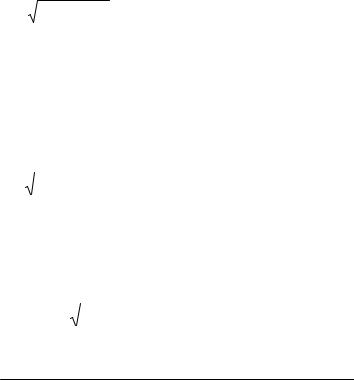
Рис. 3.5. Структурная схема обобщённой электрической машины
I~ |
(p) |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
2 |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|||||||||||||||||||||
~1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
R R |
|
|
|
|
|
R L |
R |
|
L |
|
|
|
(L L |
|
|
|
2 |
|
||||||||||||||||||||||||||||||
U |
1 |
(p) |
2 |
|
2 |
|
|
2 |
2 |
L ) |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
2 |
1 |
|
|
2 |
|
|
|
|
1 |
|
|
|
1 |
|
|
1 |
|
12 |
|
|
|
|
|
|||||||||||||
~ |
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
||||||||||||||||||||||
~2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
R R |
|
|
|
|
|
R L |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
(L L |
|
|
|
2 |
|
|||||||||||||||||||||||
U |
1 |
(p) |
2 |
|
2 |
|
|
L |
2 |
2 |
L ) |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
2 |
1 |
|
|
2 |
|
|
|
|
1 |
|
|
|
1 |
|
|
1 |
|
12 |
|
|
|
|
|
|||||||||||||
~ |
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
||||||||||||||||||
~1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
R R |
|
|
R L |
|
R L |
|
|
(L L |
|
|
2 |
|
|
|
|
||||||||||||||||||||||||||||||||||
U |
2 |
(p) |
2 |
|
2 |
2 |
L ) |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
1 |
2 |
1 |
|
|
2 |
|
|
|
|
1 |
|
|
|
1 |
|
|
|
1 |
|
12 |
|
|
|
|
|||||||||||||||
I~ |
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
R |
1 |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
||||||||||||||||||||
~2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
R R |
|
|
|
|
|
|
|
R L |
|
|
(L L |
|
|
2 |
|
|
|
|
|||||||||||||||||||||||||||||||
U |
2 |
(p) |
2 |
R L |
|
2 |
2 |
L ) |
|
||||||||||||||||||||||||||||||||||||||||||||
I~ |
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
1 |
2 |
1 |
|
|
2 |
|
|
|
|
1 |
|
|
|
1 |
|
|
|
1 |
|
12 |
|
|
|
|
|||||||||||||||
|
(p) |
|
|
|
L |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
~2 |
|
|
|
|
|
|
|
|
2 12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
I1(p) R2 2L2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
~ |
|
|
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
(R |
|
|
L ) |
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
21 |
|
|
|
|
|
|
|
|
|
|
; |
||||||||||||||||||||||||
~21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
R R |
|
|
|
|
|
R L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(L L |
|
2 |
|
|
|
|||||||||||||||||||||||
U |
1 |
(p) |
|
2 |
2 |
1 |
R |
2 |
L |
2 |
2 |
L |
) |
|
|
||||||||||||||||||||||||||||||||||||||
~ |
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
2 |
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
1 |
|
|
12 |
|
|
|
|
||||||||||||||||||
|
|
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|||||||||||||||||||
~12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
R R |
|
|
R L |
|
|
R |
|
|
|
L |
|
|
(L L |
|
2 |
|
|
|
||||||||||||||||||||||||||||||
U |
1 |
(p) |
|
2 |
1 |
|
|
|
2 |
2 |
L |
) |
|
|
|||||||||||||||||||||||||||||||||||||||
~ |
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
1 |
2 |
|
|
2 |
|
|
1 |
|
|
1 |
|
|
|
1 |
|
|
12 |
|
|
|
|
||||||||||||||||||
|
|
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|||||||||||||||||||
~21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
R R |
|
|
|
|
|
R L |
|
|
R |
|
|
|
L |
|
|
(L L |
|
2 |
|
|
|
||||||||||||||||||||||||||||
U |
2 |
|
(p) |
|
2 |
2 |
1 |
2 |
2 |
2 |
L |
) |
|
|
|||||||||||||||||||||||||||||||||||||||
~ |
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
2 |
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
1 |
|
|
12 |
|
|
|
|
||||||||||||||||||
|
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
(R |
|
L ) L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||||||||||||||||||
~12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
1 |
|
1 12 |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
R R |
|
|
R L |
|
|
|
|
|
|
L |
|
|
(L L |
|
2 |
|||||||||||||||||||||||||||||||||
U |
2 |
|
(p) |
|
2 |
1 |
R |
|
|
|
2 |
2 |
L |
) |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
1 |
2 |
|
|
2 |
|
|
1 |
|
|
1 |
|
|
|
1 |
|
|
12 |
|
|
|
|
|||||||||||||||||
(3.6)
(3.7)
(3.8)
(3.9)
(3.10)
(3.11)
(3.12)
(3.13)
(3.14)
где 1 p j 1 и 2 p j 2 .
Управляющими воздействиями в электрической машине являются в общем случае две векторные величины - U~1 и U~2 , каждая из которых независимо характеризуется и амплитудой и фазой.
В реальном электроприводе такая связь между амплитудой и фазой может быть установлена в любом случае и, в связи с этим, математический аппарат, представляющий уравнения состояния электрической машины, должен быть пригоден для проведения обобщённого анализа.
Поэтому 1 и 2 в дальнейшем будем называть обобщёнными операторами, так как они характеризуют воздействия на машину путём изменения амплитуды и производной от фазы по времени (частоты вращения) результирующих векторов статорного и роторного напряжений.
Учитывая то, что угловая частота вектора определяется как производная от его углового положения по времени d , обобщённые операторы представим в виде:
|
dt |
1 p11 p21( j 1); |
(3.15) |
2 p12 p22 (j 2 ), |
(3.16) |
Здесь p11 и p12 |
- операторы дифференцирования амплитуды результирующего |
вектора статорного |
и роторного токов соответственно; p21 и p22 - операторы |
дифференцирования амплитуды результирующего вектора роторного и статорного токов соответственно; 1 и 2 - фазы угловых положений результирующих векторов статорного и роторного токов относительно оси фазы А статорной и оси фазы а роторной обмоток соответственно.
В общем случае углы 1 и |
2 |
определяются суммой начальной фазы углового |
||
положения соответствующего вектора и текущим значением фазы: |
||||
1 |
1нач |
1тек ; |
|
(3.17) |
2 |
2нач |
2тек . |
|
(3.18) |
Для проведения анализа |
|
работы электрической машины, уравнение |
||
электромагнитного момента, которое без учёта магнитной несимметрии магнитопроводов ротора и статора определяется в соответствии с (1.94) зависимостью:
M pnLm |
|
~ |
|
|
|
~ |
|
Sin 12 , |
(3.19) |
|
|
|
|
||||||
|
I1 |
|
|
|
I2 |
|
необходимо знать амплитуды результирующих векторов статорного I~1 и роторного I~2 токов, а так же угол 12 между направлениями векторов этих токов.
Имея передаточные функции электрической машины по различным координатам, можно определить её амплитудные и фазочастотные характеристики, на основании которых в дальнейшем можно решать уравнения движения электропривода.
Амплитудно-частотные характеристики электропривода определим из передаточных функций (3.6) – (3.14) как отношение модулей числителей к модулям знаменателей соответствующих передаточных функций:
H I1 |
( ) |
|
|
|
|
|
|
R22 202 L22 |
; |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
||
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
20L12 |
|
|
|
|
|
|
|
|
|
|
||||||||
H I2 |
( ) |
; |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
U2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
10L12 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
H I |
( ) |
; |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
1 |
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
U2 |
|
|
|
|
|
|
|
|
10 L12 |
|
|
|
|
|
|
|
|
|||||
HI ( ) |
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
1 |
|
|
|
|
|
|
|
|
R2 |
|
2 |
L2 |
|
|
|||||||
|
I |
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
|
|
2 |
10 |
2 |
|
|
|
|
|
||||||||||||
HE |
( ) |
|
10 20L122 |
|
; |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
12 |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|||
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HE21 |
( ) |
10 20L122 |
|
; |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
U2 |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
HE |
( ) |
L12 10 |
102 L12 R12 |
|
, |
|||||||||||||||||
|
A |
|
||||||||||||||||||||
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где:
A 
 R1R2 10 20(L1L2 L122 ) 2 ( 20R1L2 10L1R2)2 ;
R1R2 10 20(L1L2 L122 ) 2 ( 20R1L2 10L1R2)2 ;
10 - частота возмущений, вносимых в электрическую машину посредством статорного напряжения U~1 ;
20 - частота возмущений, вносимых в электрическую машину посредством роторного напряжения U~2 ;
Частоты 10 и 20 выбраны в результате замены обобщённых операторов 1 и 2 соответственно на j 10 и j 20 .

Эта замена позволяет производить анализ машины в общем случае при одновременном изменении и амплитуды, и частоты напряжений, подводимых к статорным и роторным обмоткам машины.
Фазочастотные характеристики электрической машины в соответствие с передаточными функциями (3.20) - (3.28) имеют вид:
I1 |
|
( ) arctg |
20L2 |
B |
; |
|
|
|
|
(3.29) |
|||||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I2 |
|
( ) |
|
|
B ; |
|
|
|
|
|
|
|
|
(3.30) |
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
I1 |
|
( ) |
|
B ; |
|
|
|
|
|
|
|
|
(3.31) |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
I2 |
|
( ) arctg |
10L1 |
|
B ; |
|
|
|
|
(3.32) |
|||||||||||
|
|
|
|
|
|
||||||||||||||||
U2 |
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
||
где B arctg |
|
20L2R1 |
10L1R2 |
|
. |
(3.33) |
|||||||||||||||
R R |
|
|
|
|
|
2 |
|||||||||||||||
|
|
|
|
|
|
|
|
2 |
20 |
(L L L ) |
|
|
|||||||||
|
|
1 |
|
|
|
10 |
1 |
2 |
12 |
|
|
||||||||||
Результирующие векторы токов в статорных и роторных обмотках электрической машины определим по правилу сложения векторов.
Модуль результирующего вектора статорного тока от действия векторов статорного и роторного напряжений равен:
~ |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
2H I1 |
( )H I1 |
|
|
|
|
|
|
|
|
|
I1 |
|
|
|
|||||||||
I1 |
( ) |
|
H I1 |
( )U1 |
H I1 |
|
|
( )U2 |
|
|
( )U1U2Cos I1 |
|
|
( ) 12 |
|
|
( ) ;(3.34) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
U |
2 |
|
U |
U |
2 |
|
U |
2 |
|
|
U |
|
|
||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||||||||||||
~ |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
2H I2 |
( )H I2 |
|
|
|
|
|
|
|
I2 |
|
|||||||||||||
I2 |
( ) |
|
H I2 |
( )U1 |
H I2 |
( )U2 |
( )U1U2Cos I2 |
( ) 12 |
( ) .(3.35) |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
U |
1 |
|
U |
2 |
|
U |
|
U |
2 |
U |
2 |
|
|
U |
1 |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Для |
|
определения |
угла 1 ,2 между направлениями |
результирующих векторов |
||||||||||||||||||||||||||||||||||||
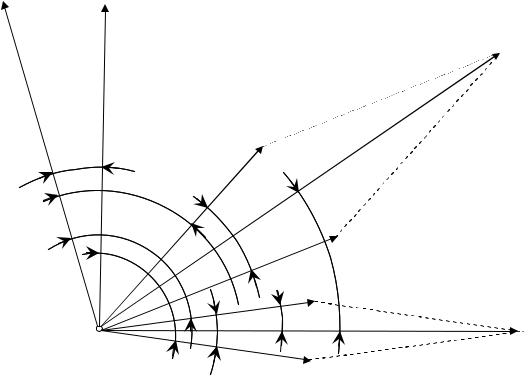
статорного и роторного токов, обратимся к рис. 3.6, на котором представлены векторные диаграммы обобщённой электрической машины.
1 ,2 21 |
21,2 |
11 11,1 |
(3.35а) |
Углы 21 |
и 11 |
выражены зависимостями (3.29) и (3.30), а углы |
21,2 и 11,1 из |
векторной диаграммы определяем по известным соотношениям между элементами косоугольного треугольника, например по теореме косинусов:
11,1 arcCos |
I112 |
I12 I122 |
; |
|
|
|
|
|
|
|
|
(3.35б) |
|||||||
|
|
2I11I1 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
21,2 arcCos |
I212 |
I22 I222 |
. |
|
|
|
|
|
|
|
|
(3.35в) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
2I21I2 |
|
|
|
|
|
|
|
|
|
|
|
|||
После подстановки (3.29), (3.30), (3.35в) и (3.35б) в (3.35а), получаем: |
|
||||||||||||||||||
|
|
|
|
L |
|
|
I2 |
I2 |
I2 |
I2 |
I2 |
I2 |
|
||||||
1 ,2 |
|
arctg |
|
20 2 |
arcCos |
11 |
1 |
22 |
arcCos |
21 |
2 |
22 |
. |
(3.35г) |
|||||
2 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
R2 |
|
|
|
2I11I1 |
|
2I21I2 |
|
||||||
Для определения результирующего электромагнитного момента необходимо в |
|||||||||||||||||||
уравнение (1.34) подставить значение (3.34), (3.35) и (3.35г) с учётом того, что |
|||||||||||||||||||
12 2 ( ) 1 ( ), |
|
|
|
|
|
|
|
|
|
|
(3.38) |
||||||||
в результате получаем:
|
|
|
~ |
|
|
|
~ |
|
|
1 |
~2 |
|
1 |
~2 |
|
(3.39) |
|
|
|
|
|
|
|
||||||||||
M |
pn Lm |
|
I1 |
|
|
|
I2 |
Sin 1 ,2 |
|
|
L12mI1 Sin2 1d2 |
|
|
L21mI2 Sin2 |
2d1 |
|
|
|
|
|
2 |
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
~
U1 U~2
~
I1
~
I11
12
11
11,12 |
|
|
|
|
21 |
|
~ |
|
|
|
|
I |
12 |
|
22 |
~ |
12 |
~ |
|
|
I21 |
|
||
21,2 |
|
I |
2 |
|
|
|
|
||
21,22 |
|
|
|
|
~ |
|
|
|
|
I |
22 |
|
|
|
Рис. 3.6. Векторная диаграмма обобщенной электрической машины

Глава 4. Статические характеристики электрических машин
Внастоящей главе рассматривается методика расчёта статических характеристик любой электрической машины на основе уравнений, полученных в предыдущих главах.
Для проведения расчёта принимает следующие допущения – пазовая несимметрия статора и ротора электрической машины не учитывается в виду её незначительного воздействия на характеристики.
Вкачестве основы рассмотрения характеристик выберем асинхронную машину.
4.1. Статические характеристики асинхронной машины
Уравнения равновесия напряжений асинхронной машины (АМ) могут быть получены из (3.2) при роторном напряжении U2 равном нулю:
~ |
~ |
~ |
(4.1) |
U1 |
I1 R1 (p j )L1 I2L12 (p j 1); |
||
|
~ |
~ |
|
0 I2 R2 |
(p j )L2 I1L12 (p j 2 ). |
|
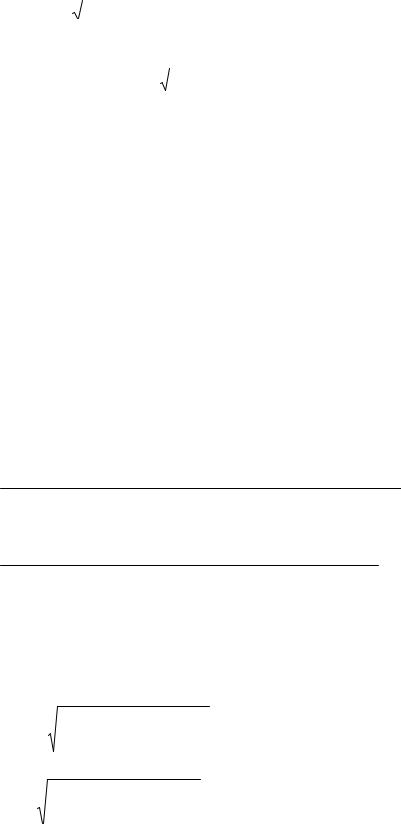
|
Структурная схема асинхронной машины, |
соответствующая системе уравнений |
||
(4.1), представлена на рис. 4.1.
Электромагнитный момент АМ в соответствии с (3.39) при отсутствии несимметрии магнитопроводов статора и ротора определяется зависимостью:
M pn |
|
~ |
|
|
|
~ |
|
L12Sin 1 ,2 . |
(4.2) |
|
|
|
|
||||||
|
I1 |
|
|
|
I2 |
|
Модуль результирующих векторов статорного и роторного токов определим из (3.34) и (3.35) принимая U2 равным нулю.
Аналогичный результат может быть получен и в результате умножения амплитудно-частотных характеристик (3.20) и (3.21) на U1 .
В результате получаем:
|
|
|
~ |
|
|
|
|
|
U1 |
R22 202 L22 |
; |
|
|
|
(4.3) |
||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
I1 |
|
H I1 |
( )U1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
A |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
U |
L |
|
|
|
|
|
|||||
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
I2 |
|
HI2 |
( )U1 |
|
|
1 |
20 12 |
. |
|
|
|
|
(4.4) |
||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
U1 |
|
|
|
A |
|
~ |
|
~ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Угол между направлениями результирующих векторов |
и |
определим при U2 |
|||||||||||||||||
I1 |
I2 |
||||||||||||||||||
равном нулю, когда в соответствии с (3.34) и (3.35) будут иметь место следующие соотношения:
I1 I11 ; I2 I21 |
; I12 0 ; I22 0 |
(4.5) |
||||||
В результате для АМ уравнение (3.35г) принимает вид: |
||||||||
1 ,2 |
|
arctg |
20 L2 |
. |
(4.6) |
|||
|
|
|||||||
2 |
|
R2 |
|
|
||||
Учитывая, что: |
|
|
a b |
|
||||
|
|
arctg( ) и arctga arctgb arctg |
||||||
|
1 ab |
|||||||
2 |
|
|
|
|
|
|||
уравнение (4.6) представим в виде:
1 ,2 arctg |
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
(4.7) |
|
|
|
|
|
|
|
|
|
|
|
||||||
20L2 |
|
|
|
|
|
|
|
|
|||||||
При подстановке (4.7) в (4.2) учтём, что |
|
||||||||||||||
arctga arcSin |
|
a |
|
. |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1 a2 |
|
|
|
|
|
|
|
|
|||||
В результате преобразований получаем: |
|
||||||||||||||
Sin 1 ,2 Sinarctg |
R2 |
|
|
|
R2 |
|
|
. |
(4.8) |
||||||
20 L2 |
|
|
|
|
|
||||||||||
2 |
L2 |
|
|||||||||||||
|
|
|
|
|
|
R2 |
|
||||||||
|
|
|
|
|
|
|
|
20 |
2 |
2 |
|
|
|
||
Уравнение механической характеристики асинхронной машины получаем в результате подстановки в уравнение (4.2) значений (4.3), (4.4) и (4.8):
M R1R2 |
20 10 |
p U2 L2 |
R |
(4.9) |
|||||
(L1L2 |
L122 |
) 2 |
( 20L2R1 10L1R2 )2 . |
||||||
|
|
|
|
n 1 |
20 |
12 |
2 |
|
|
У асинхронной машины векторы статорного и роторного токов вращаются в установившемся режиме работы синхронно, поэтому частота тока ротора определяется
разностью между частотой тока статора и частотой тока ротора: |
|
|||||||||
2 1 pn 1 ск , |
|
|
|
|
|
|
|
(4.10) |
||
где ск - частота абсолютного скольжения (частота тока |
ротора) асинхронной |
|||||||||
машины; и - электрическая и механическая частоты вращения ротора. |
||||||||||
В установившемся режиме работы асинхронной машины, составляющие p11 и p12 |
||||||||||
обобщённых операторов 1 и 2 |
равны нулю, а сами операторы соответственно равны: |
|||||||||
1 j 1; |
|
|
|
|
|
|
|
|
(4.11) |
|
2 j 2 . |
|
|
|
|
|
|
|
|
(4.12) |
|
С учётом (4.10) уравнение механической характеристики асинхронной машины |
||||||||||
принимает вид: |
|
|
|
|
|
|
|
|
|
|
|
p U2L2 |
R |
( p |
) |
|
|||||
M |
n |
1 |
12 |
2 |
1 |
n |
|
|
, |
(4.13) |
R1R2 1( 1 p )(L1L2 |
L212 ) 2 ( 1 p )L2R1 1L1R2 2 |
|||||||||
или с учётом (4.13): |
|
|
|
|
|
|
|
|
|
|
M |
p U2L2 |
R ( ) |
|
. |
(4.14) |
|||||
n |
1 |
12 |
2 |
1 |
|
|
||||
R1R2 1( 1 )(L1L2 |
L212 ) 2 ( 1 |
)L2R1 1L1R2 2 |
||||||||
Для определения критических (максимальных) моментов, критических скоростей, критических относительных скольжений и критических абсолютных скольжений, соответствующих критическим моментам асинхронной машины, определяем первую производную от момента (4.14) по угловой скорости и приравниваем её к нулю.
В результате этого определяем критическую угловую скорость:
|
кр |
|
|
R12R22 12L12R22 |
|
|
. |
(4.15) |
|||
|
|
|
)2 |
||||||||
1,2 |
1 |
R2L2 |
2 |
(L L L2 |
|
|
|||||
|
|
|
1 |
2 |
1 |
1 |
2 |
12 |
|
|
|
С учётом (4.10) определяем критическую частоту абсолютного скольжения:
ск1,2кр |
|
|
|
R2R2 |
|
2L2R2 |
|
|
|
. |
(4.16) |
||||
|
|
1 |
2 |
|
1 |
|
1 2 |
|
|
|
|||||
R |
2 |
2 |
|
2 |
(L L |
|
|
2 |
) |
2 |
|||||
|
|
|
L |
|
2 |
L |
|
|
|
||||||
|
1 |
2 |
1 |
1 |
|
|
12 |
|
|
|
|
||||
Относительное критическое скольжение равно:
|
|
|
|
|
|
|
R2R2 |
|
L2R2 |
|
|||
|
1 |
cr1,2кр |
|
|
|
|
1 2 |
|
|
||||
|
|
|
|
|
2 |
|
|
||||||
|
1 |
|
R2L2 |
|
|
1 |
2 |
|
(4.17) |
||||
s1,2кр |
|
2 |
(L L L2 )2 . |
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
1 |
2 |
1 |
1 |
2 |
12 |
|
|
|
Пусковой электромагнитный момент асинхронной машины определяем из (4.14) при угловой скорости , равной нулю:
Mпуск |
|
|
|
p U2L2 R |
|
|
|
. |
|
(4.18) |
||
|
|
n 1 12 |
|
2 1 |
|
|
|
|
||||
R1R2 |
12 (L1L2 L212 ) 2 |
12 (L2R1 L1R2 )2 |
|
|||||||||
Величину электромагнитного момента, соответствующего критическому |
||||||||||||
скольжению, определяем путём подстановки (4.15) в (4.14): |
|
|||||||||||
|
|
|
|
p U |
2L2 R |
|
ск.кр |
|
||||
|
|
|
|
n |
1 12 |
2 |
|
|
||||
M1,2кр |
|
R1R2 |
1 ск.кр (L1L2 L2 |
12 ) 2 |
( ск.крL2R1 1L1R2 )2 |
. |
(4.19) |
|||||
Если при частотах питающих напряжений, близких к номинальным, пренебречь активным сопротивлениемR1 статорной обмотки, то упрощается выражение для определения электромагнитного момента:
MR |
|
|
|
|
|
|
|
p U2L2 R ( ) |
|
|
|
|
; |
(4.20) |
||||||||||||
|
|
|
|
|
|
|
n |
|
|
1 |
|
12 |
|
2 1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1 0 |
|
|
( ) |
2 |
|
2 |
(L L |
2 |
) |
2 |
|
2 |
2 |
|
2 |
|
|
|||||||||
|
|
|
|
|
L |
|
1 |
L R |
|
|
|
|||||||||||||||
|
|
1 |
|
|
|
|
|
1 |
|
|
1 |
2 |
12 |
|
|
|
1 |
2 |
|
|
||||||
для определения угловой критической скорости: |
|
|||||||||||||||||||||||||
ск.кр1,2 |
|
|
L1R2 |
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
(4.21) |
|||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
L L L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1 |
2 |
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
s1,2кр |
|
|
|
L1R2 |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
(4.22) |
|||||
(L L |
2 |
L2 |
) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
1 |
|
1 |
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Разделив числитель и знаменатель (4.20) на квадрат знаменателя (4.22), получаем:
MR |
|
|
pnU12L122 |
sкр |
|
; |
(4.23) |
||||
|
|
|
s |
|
sкр |
|
|||||
1 0 |
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
|
|
L R |
( |
|
|
|
|
) |
|
|
|
|
sкр |
s |
|
||||||||
|
1 |
1 2 |
|
|
|
|
|
||||
При условии пренебрежения активным сопротивлением R1 статорной цепи, выражение для определения критического момента принимает вид:
M1,2крR 0 |
|
|
|
|
p U2L2 |
|
. |
(4.24) |
|||||||
|
|
|
n |
1 |
|
12 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
|
|
|
2 |
2 |
L (L L |
|
2 |
|
|
||||
|
|
|
|
|
|
2 |
L |
) |
|
|
|||||
|
|
|
|
|
|
1 |
1 |
1 |
12 |
|
|
||||
Разделив (4.24) на (4.23), получаем упрощённую формулу Клосса: |
|
||||||||||||||
MR 0 |
|
2MкрR 0 |
. |
|
|
|
|
|
(4.25) |
||||||
|
|
|
|
|
|
|
|||||||||
1 |
|
|
s |
|
sкр |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
sкр |
s |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Уточнённая формула Клосса может быть получена в результате совместного решения (4.14) и (4.19), однако из-за чрезмерной громоздкости она здесь не приводится и в инженерной практике её использование, по-видимому, будет ограниченным.
Для получения уравнения электромеханической характеристики асинхронной машины определим ток ротора I2 . Для этого умножим модуль частотной передаточной функции (3.24) на модуль тока статора:
I2 ( ) HI2 ( )I1 |
|
I1 ск L12 |
|
|
. |
(4.26) |
||||||||||||||
|
|
|
|
|||||||||||||||||
|
|
|
||||||||||||||||||
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
R2 |
2 |
L2 |
|
||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
ск |
2 |
|
|
|
|
Путём подстановки в (4.2) значения (4.26) и (4.8), получаем: |
|
|||||||||||||||||||
M |
pnI12L122 |
R2 ск |
|
|
|
|
|
|
(4.27) |
|||||||||||
R |
2 |
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
2 |
ск |
L |
|
|
|
|
|
|
||||||||||
или |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
M |
|
pn I1I2L12R2 |
|
. |
|
|
|
|
|
(4.28) |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
R22 L22 ск2 |
|
|
|
|
|
|
|||||||||||
Приравнивая правые части (4.27) и (4.14), получаем уравнение электромеханической характеристики асинхронной машины:
I1 U1 |
R1R2 |
1( 1 |
( )2 L2 R2 |
(4.29) |
|||
)(L1L2 L122 |
) 2 ( 1 )L2R1 1L1R2 2 , |
||||||
|
|
|
1 |
2 |
2 |
|
|
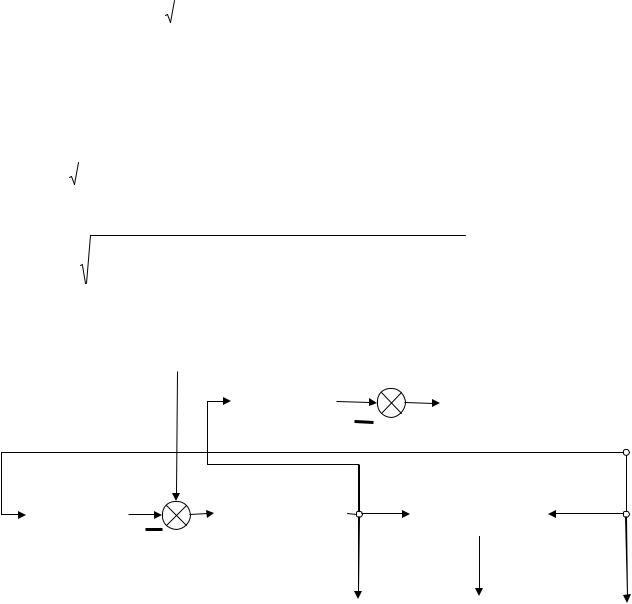
U~2 0
U~1 |
|
|
|
|
1 |
|
|
(p j 2 )L21 |
|
|
|
|
|||
|
|
R2 |
(p j 2 )L2 |
|
|||
|
|
|
|
||||
|
|
|
|
|
|||
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
~ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
(p j )L |
|
|
|
|
|
|
pnLm |
|
I1 |
|
|
|
I |
|
Sin 12 |
|
|
|
|
|
R1 |
(p j 1)L1 |
2 |
|
|||||||||||||
1 |
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
||
|
|
|
|
|
~ |
~ |
|
|||||||||||
|
|
|
|
|
|
I1 |
|
|
|
M |
|
|
I |
2 |
||||
Рис. 4.1. Структурная схема асинхронной машины с короткозамкнутым ротором
Аналогичным образом определяются динамические и статические характеристики любой электрической машины.