

8. Модель дискретного канала связи с краевыми искажениями и дроблениями
Модели дискретных каналов с краевыми искажениями и дроблениями (просечками) играют важную роль при разработке алгоритмов работы устройств, которые непосредственно подключаются к выходам демодуляторов радиоприемников телеграфных сигналов. Такими устройствами являются регенераторы, устройства оценки качества, сложения разнесенных сигналов и т. д.
Краевые искажения подразделяются на три вида: случайные, регулярные и характеристические. Случайные краевые искажения являются следствием присутствия шумоподобных аддитивных помех. Регулярные краевые искажения обусловлены несовершенством передающих и приемных устройств, спецификой аддитивных помех, имеющих, например, при приеме ЧТ сигналов неравномерный спектр, эффектом Доплера, а также селективными замираниями сигнала в среде распространения. Причиной характеристических искажений являются переходные процессы в фильтрах приемных устройств. При передаче сообщений, представляющих собой случайные бинарные последовательности, характеристические искажения можно также считать случайными.
Если на интервале времени, соответствующем значению одного символа сообщения, под влиянием мешающих факторов происходит изменение этого значения с последующим возвратом к прежнему, то это явление называется дроблением элемента.
Краевые искажения и дробления обобщенно называют временными искажениями или телеграфными искажениями, которые количественно оцениваются отношением модуля отклонения фронта элемента от его среднего местоположения к длительности самого элемента, выраженным в процентах:
d = 100 |dt| / T. (8.1)
Исследователями широко используется модель краевых искажений, описываемых гауссовским законом распределения [19, 21] :
W(d)
= exp(-
(d
/)2
/ 2) /
/
![]() ,
(8.2)
,
(8.2)
где - СКО случайной величины d.
Если имеет место закон распределения (8.2), то вероятность ошибки элемента сообщения описывается выражением
Pош = 2 {[ 0,5 - Ф(м /)] - [ 0,5 - Ф(м /)]2 }, (8.3)
где Ф - интеграл вероятностей [33, 35];
м - величина, характеризующая исправляющие способности регенератора.
Если < 17 %, то можно оценивать вероятность ошибки с помощью упрощенного выражения
Pош = 2 [ 0,5 - Ф(м/)] . (8.4)
В каналах с переменными параметрами величина также переменная. Однако вышеприведенная модель краевых искажений, являясь феноменологической, совершенно не отражает физику работы самого демодулятора. В частности, эта модель не дает представления о зависимости напряжения на выходе фильтра нижних частот (ФНЧ) от отношения сигнал/помеха, что не позволяет в свою очередь исследовать явления зависимости дроблений от величины зоны нечувствительности решающего устройства (задержки по напряжению) и зависимости преобладаний от постоянного смещения на выходе ФНЧ. Это же замечание относится и к модели дроблений, предлагаемой в [21].
Ниже рассматривается лишенная вышеуказанных недостатков имитационная модель бинарной последовательности на выходе демодулятора, которая формирует краевые искажения элементов и дробления с учетом изменения параметров канала связи с течением времени. Квинтэссенция данного метода моделирования заключается в том, что интервал элементарной посылки разбивается на N подынтервалов, которые в дальнейшем называются квантами. Зная отношение сигнал/помеха как функцию времени, можно определить поток ошибок для квантов, считая эти ошибки независимыми и происходящими с вероятностью, обусловленной как отношением сигнал/помеха, так и числом квантов, на которое разбиты элементы. Суммируя “по модулю два” полученный поток ошибок квантов с передаваемым сообщением и производя операцию скользящего суммирования на интервале длительности элемента вдоль всего сообщения, можно получить функцию времени, которая соответствует напряжению на выходе фильтра нижних частот демодулятора. Преобразуя полученное колебание с помощью порогового устройства, можно воспроизвести бинарную последовательность, которая имитирует сигнал на выходе решающего устройства (триггера) демодулятора. Точность имитации по оси времени определяется числом N квантов на интервале одного элемента сообщения. Так как краевые искажения в трактах аппаратуры определяются обычно с точностью 1-5 %, то число N достаточно брать, соответственно равным 100-20.
Определим вероятность ошибки кванта Ркв от отношения сигнал / помеха для заданного числа квантов на интервале одного элемента сообщения. Для этого рассмотрим канал связи с постоянными параметрами в условиях аддитивного белого шума. Предположим, что вероятность ошибки при приеме элементов сообщения равна Рош. Представим каждый элемент сообщения в виде N равных частей-квантов. Полагаем, что на интервале каждого отдельно взятого кванта принимается индивидуальное независимое решение о его знаке с некоторой ошибкой Ркв. Результирующее решение о значении отдельно взятых элементов выносится по совокупности решений о значениях, соответствующих этим элементам квантов. Ошибка при приеме элемента в этом случае должна происходить тогда, когда на интервале этого элемента число ошибочно принятых квантов будет превосходить заданный порог No. Вероятность ошибки элемента описывается соответствующей этому случаю формулой
Рош
=
![]()
![]()
( 1 - Pкв)i
Pкв(N-i)
. (8.5)
( 1 - Pкв)i
Pкв(N-i)
. (8.5)
Задача моделирования канала связи с временными искажениями в этом случае сводится к определению значения Ркв при заданных значениях Рош, N и No. Для этого необходимо решить уравнение (8.5) относительно величины Ркв. Точное решение этой задачи неизвестно. Будем искать приближенное решение в виде
Ркв = К1 ехр(- К3(-ln(2Pош))K2 ). (8.6)
Очевидно, что если заменить в этом выражении значение Рош на приведенное ранее для случая некогерентного приема:
Рош = 0,5 ехр(- H2 / M), (8.7)
то формула (8.6) примет следующий вид:
Ркв = К1 ехр (- К3 ( H2 / M)K2 , (8.8)
который характерен для зависимости вероятностей ошибки от отношения сигнал/помеха H , например, в выражении (8.7) с той разницей, что введены поправочные коэффициенты К1, К2 и К3, которые обеспечивают точное решение уравнения (8.5) при любых трех заданных значениях параметра Рош (или H). Естественно потребовать, чтобы No = N / 2 и при отсутствии сигнала вероятность ошибки, определяемая по формуле (8.8), была бы равна 0,5. Подставляя это значение в формулу (8.8), получаем значение коэффициента К1 = 0,5. Коэффициенты К2 и К3 находятся из системы уравнений:
Ркв2 = 0,5 ехр(-К3(ln( 2Рош (Ркв2)))K2 ;
(8.9)
Ркв3 = 0,5 ехр(-К3(ln( 2Рош (Ркв3)))K2.
Решая эти уравнения, находим:
![]() ; (8.10)
; (8.10)
К3 = ln(2Pквi) / {ln[2Pош(Рквi)]}K2 при i = {2,3}. (8.11)
Итак, задаваясь значениями N, Pкв2 и Ркв3 и определяя по формуле (8.5) соответствующие значения Рош (N, Pош2) и Рош(N,Рош3), можно с помощью выражений (8.10) и (8.11 ) определить коэффициенты К2 и К3. С целью предоставления возможности проведения расчетов при больших значениях N целесообразно вычисления проводить в логарифмическом масштабе, заменяя операции умножения и деления в соответствующих вычислительных алгоритмах на операции сложения и вычитания. В этом случае
Pош
= . (8.12)
. (8.12)
В табл. 8.1 приведены значения коэффициентов К2 и К3 для различных значений N при значениях Ркв2=0,2 и Ркв3=0,3.
Таблица 8.1
Значения коэффициентов К2 и К3


N = 1 N = 5 N = 11 N = 21 N = 51 N = 101

K2 1 0,89290448 0,82734569 0,77609359 0,7175291 0,684297

K3 1 0,46152849 0,30637636 0,22110829 0,1428717 0,101796
Таким образом, задаваясь числом квантов N, на которое разбиты элементы сообщения, и значением вероятности ошибки элементов Рош (или значением отношения сигнал/шум H) и определив коэффициенты К2 и К3 с помощью формулы (8.8), можно найти вероятность ошибки квантов Ркв. На рис. 8.1 приведены зависимости вероятности ошибки квантов от вероятности ошибки элементов и числа квантов в элементе. Из рисунка видно, что вероятность ошибки кванта на порядок или даже несколько порядков может превосходить вероятность ошибки элементов. Это означает, что случайные краевые искажения в ограниченных пределах имеют место даже при больших отношениях сигнал/помеха, когда вероятность ошибки элемента очень мала. Знание вероятности ошибок квантов Ркв как функции времени дает
 0,5
0,1 0,01 0,001
0,0001 0,00001 Рош
0,5
0,1 0,01 0,001
0,0001 0,00001 Рош





 0,2 -
0,2 -
N = 101
N = 51
0,1 -
N = 21
0,05 -
N = 11
0,02 -
0,01 -
N = 5
0,005 -
0,002 -
Ркв -
N = 1
Рис. 8.1
возможность формировать поток ошибок квантов В(mk) с учетом изменения параметров канала связи (здесь mk - порядковый номер кванта в сообщении). При этом можно считать, что на интервале отдельных элементов значение Ркв не изменяется.
B(mk) = ent[R(mk) + Pкв(m)] . (8.13)
Полученный поток ошибок квантов суммируется “по модулю два” с передаваемым сообщением S1(mk):
S02(mk) = | S1(mk) - B(mk)| . (8.14)
Эквивалент напряжения на выходе фильтра нижних частот можно получить на выходе скользящего сумматора:
Sсум2(mk)
=
 S02(mk)
. (8.15)
S02(mk)
. (8.15)
Если по той или иной причине на выходе ФНЧ имеет место постоянное смещение величиной Uo, то
Uфнч (mk) = Uo + Sсум2(mk) . (8.16)
Решающее устройство функционирует в соответствии с алгоритмом
S2(mk) = 0,5 (sign(Uфнч(mk) - N / 2 ) + 1) . (8.17)
Если решающее устройство имеет зону нечувствительности (задержку по напряжению), равную Uз, то алгоритм работы этого устройства описывается рекуррентной формулой
S2(mk) = 0,5(sign(Uфнч(mk) + Uз sign(S2(mk - 1) - 0,5) - N / 2) + 1). (8.18)
В результате обобщенный алгоритм модели дискретного канала с временными искажениями можно записать в следующем виде:
S2(mk)=0,5{sign[ |S1(i)-ent[R(mk)+Pкв(mk)]|+
|S1(i)-ent[R(mk)+Pкв(mk)]|+
+Uo+Uзsign(S2(mk-1)-0,5)-N/2)+1]}. (8.19)
На рис. 8.2 приведена блок-схема соответствующего алгоритма.
НАЧАЛО

ВВОД входных данных



 -формирование
бинарной последовательности сообщения;
-формирование
бинарной последовательности сообщения;
-формирование значений амплитуд сигнала и помехи;
-вычисление отношения сигнал / помеха;
-определение вероятности ошибки кванта элемента;
-определение факта появления ошибки кванта элемента;
-формирование потока квантов сообщения;
-формирование сигнала на выходе ФНЧ посредством сумми-
рования квантов сообщения методом скользящего окна;
-формирование решения на выходе демодулятора;
-сравнение принятого решения с передаваемой последователь-
ностью и построение вектора ошибок элементов.


ВЫВОД на экран дисплея графиков:
- отношения сигнал / помеха;
-уровня станционных помех;
-передаваемой последовательности;
-сигнала на выходе ФНЧ;
-последовательности решений;
-векторов ошибок элементов.
НЕТ
Конец сеанса
?

 ДА
ДА
-формирование оценок качества знаков сообщения;
-формирование векторов стирания и ошибок знаков сообщения.
ВЫВОД протокола испытаний

ВЫВОД гистограммы отношения
сигнал / помеха
Вычисление теоретических значений
распределения вероятности отношения сигнал / помеха
ВЫВОД графика распределения
вероятности отношения
сигнал / помеха
КОНЕЦ
Рис. 8.2
Необходимо заметить, что результаты вычислительных экспериментов, полученные с помощью программы “FEDING-K” при N = 1, эквивалентны результатам, полученным с помощью программы “FEDING-1”.
Программа “FEDING-K” модели дискретного канала связи с временными искажениями приведена в прил. 4.
Входными данными программы являются:
- вид манипуляции (для декодера);
- скорость манипуляции;
- число знаков в телеграмме;
- время корреляции замираний сигнала и станционных помех;
- среднее значение амплитуды флуктуирующего компонента сигнала;
- коэффициент взаимной корреляции квадратур случайной составляющей
сигнала, который определяет характер закона замираний;
- амплитуда регулярной составляющей сигнала;
- спектральная плотность мощности шума;
- вероятность появления станционных помех;
- МО распределения уровней станционных помех в децибелах;
- СКО распределения уровней станционных помех в децибелах;
- номер сеанса связи;
- начальное квазислучайное число;
- уровень постоянного напряжения на выходе фильтра нижних частот;
- порог чувствительности решающего устройства (триггера).
Выходными данными программы являются:
- график зависимости от времени отношения сигнал/помеха (дисплей);
- график зависимости уровня спектральной плотности мощности
станционных помех (дисплей);
- передаваемая бинарная последовательность;
- напряжение на выходе фильтра нижних частот;
- результат принятого демодулятором решения;
- вектор ошибок элементов для заданного вида манипуляции;
- данные о количестве ошибок в отдельных кодовых комбинациях (файл,
дисплей и принтер);
- для заданного вида демодулятора выводится вектор ошибок
знаков при использовании семиэлементного кода с проверкой на
четность (файл, дисплей и принтер);
- для каждого знака выводится минимальное значение отношения
сигнал/помеха;
- для каждого знака выводится минимальное значение напряжения на
выходе ФНЧ;
- для каждого знака выводится максимальное значение краевых
искажений;
- гистограмма распределения значений отношения сигнал/помеха
(дисплей);
- графики плотности вероятности релеевского, райсовского (обобщенного
релеевского), одностороннего усеченного нормального распределения и
распределения Накагами.
Как и в предшествующих программах, после окончания сеанса связи для указанного номера сеанса создается файл с протоколом испытаний. Предусматривается режим работы с распечатыванием протокола испытаний и выводом его на дисплей. В программе, как и ранее, предусмотрено запоминание введенных исходных данных, что позволяет повторять сеансы с необходимой оперативной корректировкой отдельно взятых параметров. Также имеется демонстрационный режим работы, который позволяет подготовить заранее необходимые входные данные для оперативной демонстрации работы модели.
В табл. 8.2-8.3 в качестве примера приведены протоколы, содержащие выходные данные соответственно для АТ и ЧТ демодуляторов. Сеансы связи для этих демодуляторов проведены в абсолютно одинаковых условиях, о чем свидетельствуют одинаковые минимальные значения отношений сигнал/помеха.
Даже очень ограниченный объем результатов, приведенных в данных протоколах, демонстрирует жесткую зависимость между отношением сигнал/помеха и уровнями сигналов на выходе фильтров нижних частот АТ и ЧТ демодуляторов, а также достаточно хорошую корреляцию между отношением сигнал/помеха и краевыми искажениями принимаемых бинарных последовательностей. Эти характеристики наряду с сообщениями об обнаруженных ошибках (стираниями знаков) могут быть применены для оценки качества канала связи во время приема информации с последующим использованием полученных оценок при декодировании знаков, повторного запроса по каналу обратной связи недостоверно принятой части сообщения и т. д.
Была проведена проверка адекватности (по вероятности ошибки) результатов принятия решения вышеописанным методом при идеальном синхронизаторе (регенераторе) с результатами теоретических расчетов для случая некогерентного приема сигналов. Полученные с этой целью оценки вероятностей ошибок элементов для общего массива элементов, равного 1400, нанесены в виде точек на графики кривых зависимости вероятности ошибок от отношения сигнал/помеха, полученных путем аналитического расчета и приведенных на рис. 8.3. Известно [12], что в случае некогерентного приема сигналов АТ энергетически проигрывает ЧТ 3 дБ, а ЧТ в свою очередь проигрывает ОФТ тоже 3 дБ. С учетом этого из приведенного рисунка видно, что точки, полученные в результате вычислительного эксперимента, отклоняются от координат своего идеального местоположения в области вероятностей ошибочного приема элементов, не превышающих имеющее практическое значение величину 0.1, не более, чем на доли децибела. Полученные результаты доказывают правомерность использования вышеописанного метода принятия решений для имитационного моделирования канала связи с краевыми искажениями и дроблениями элементов.
Экзаменатор к. т. н, доцент В.Л. Хазан
Министерство образования Российской Федерации
Омский государственный технический университет
КАФЕДРА «СРЕДСТВА СВЯЗИ и ИНФОРМАЦИОННАЯ БЕЗОПАСНОСТЬ»
ДИСЦИПЛИНА «МОДЕЛИРОВАНИЕ СИСТЕМ СВЯЗИ»
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 7
Моделирование многолучевых каналов связи.
(схема была в лекции, текст из скинутого файла про модель двухмерного КС)
Хотя имитационное компьютерное моделирование требует во много раз больших временных затрат машинного времени по сравнению с аналитическим моделированием, оно имеет неоспоримое преимущество перед ним в том, что позволяет использовать для аппроксимации ПХ усилительных трактов любого рода аппроксимирующие функции, например, функцию arctg(x) или кусочно-линейную функцию. Кроме того, в последнее время современные приемные устройства всех типов невозможно представить без устройств цифровой обработки сигналов (УЦОС), для которых требуется преобразование сигнала в цифровую форму. Эта операция автоматически осуществляется в имитационной компьютерной модели. Имитируя на современных ЭВМ радиосигнал в цифровой форме, можно реализовать любой алгоритм его цифровой обработки, который ничем практически не будет отличаться от алгоритма, реализованного в УЦОС РПУ.
Имитационная модель двухмерного КВ КС формирует отсчеты квадратур колебания, адекватные отсчетам квадратур напряжения на выходе тракта промежуточной частоты радиоприемного устройства [48]. Это соответствует векторному представлению колебания на комплексной плоскости. Так как КВ канал в общем случае является многолучевым, то результирующий вектор представляет собой сумму векторов сигнала, каждый из которых соответствует собственному индивидуальному лучу, а также сумму векторов атмосферного шума и станционных помех. Модуль и фаза шумового компонента изменяется по нормальному случайному закону. Модули и фазы сигнала и станционных помех изменяются как по закону модуляции, так и по случайному закону, обусловленному условиями распространения в канале связи. Таким образом, каждый из компонентов колебания может быть представлен в виде последовательности отсчетов проекций вектора на оси декартовой системы координат. Результирующий вектор, представляющий собой сумму векторов, имеет проекции на оси координат, равные сумме соответствующих проекций отдельных компонентов. При формировании отсчетов квадратур каждого из компонентов необходимо задавать между этими отсчетами интервал времени, который не может быть больше величины, обратной удвоенной полосе пропускания тракта промежуточной частоты приемного устройства. В УЦОС, как правило, используются квадратурные выборки сигнала, и необходимость в формировании радиосигнала на выходе имитатора на высокой частоте отпадает.
Квадратуры передаваемого сообщения в общем случае описываются выражениями:
 (4.6.1)
(4.6.1)
где A(t) - амплитуда передаваемого сигнала,
(t) - мгновенная разность между частотой передаваемого сигнала и номинальной частотой несущего колебания;
(t) - начальная фаза передаваемого сигнала.
В соответствии с этим, отсчеты квадратур передаваемого сообщения, которые поступают на вход модели канала связи, имеют следующий вид:
 (4.6.2)
(4.6.2)
где по сравнению с выражениями (4.6.1) знак интеграла заменен знаком суммы, а значение t является конечным интервалом времени между любыми соседними отсчетами квадратур.
В данной модели основные параметры канала связи (параметры лучей, уровни сигнала и помех и т.д.) формируются аналогично тому, как это описано в первой главе. Поэтому ниже внимание уделено лишь тем фрагментам модели, которые представляют собой новизну, связанную с особенностями формирования отсчетов квадратур сигнала, шума и станционных помех на выходе тракта промежуточной частоты приемного устройства.
Отсчеты квадратур сигнала, пришедшего в точку приема i-м лучом, могут быть описаны в виде уравнений:
 (4.6.3)
(4.6.3)
где Ai(nt) - значение в (nt)-ый момент времени амплитуды сигнала, пришедшего в точку приема i-м лучом,
i(lt) - значение в (lt)-ый момент времени мгновенной разности между частотой сигнала, пришедшего в точку приема i-м лучом, и номинальной частотой несущего колебания,
i(nt) - значение в (nt)-ый момент времени начальной фазы сигнала, пришедшего в точку приема i-м лучом.
В свою очередь, отсчеты амплитуды сигнала, который приходит в точку приема i-м лучом могут быть описаны выражением:
Ai(nt) = A(nt-ni) |μi(nt)|, (4.6.4)
где A(nt) - закон изменения амплитуды сигнала на передающем конце радиолинии,
|μi(nt)| - модуль коэффициента передачи i-го луча,
ni - время задержки сигнала, приходящего в точку приема i-м лучом.
Значения в (nt)-ые моменты времени мгновенной разности между частотой сигнала, пришедшим в точку приема i-м лучом, и номинальной частотой несущего колебания можно описать выражением:
i(nt) = (nt-ni) + i(nt), (4.6.5)
где (nt) - закон изменения частоты сигнала на передающем конце радиолинии относительно номинала несущей,
i(nt) – отклонение от номинального значения за счет эффекта Доплера частоты сигнала, пришедшего в точку приема i-м лучом.
В (nt)-ый момент времени значения начальной фазы сигнала, пришедшего в точку приема i-м лучом, описываются выражением:
i(nt) = (nt-ni) + *i(nt), (4.6.6)
где (nt) - закон изменения фазы сигнала на передающем конце радиолинии, *i(nt) - изменение начальной фазы сигнала в i-м луче.
Отсчеты квадратур результирующего сигнала на выходе тракта промежуточной частоты приемного устройства являются совокупностью отсчетов компонентов, которые приходят в точку приема различными лучами. Поэтому можно записать:
 (4.6.7)
(4.6.7)
где I - общее количество лучей.
Отсчеты квадратур шума являются случайными величинами, распределенными по нормальному закону. Корреляция между отдельными отсчетами соответствующих квадратур обусловливается полосой пропускания тракта промежуточной частоты приемника F. Интервал корреляции То может быть оценен следующим образом [96] :
То = 1/2F . (4.6.8)
Представляя последовательность отсчетов каждой из квадратур шума, взятую с периодом t, в виде марковской [165], можно принять значение коэффициента корреляции r(t) равным:
r(t) = exp(-t/To). (4.6.9)
Зная спектральную
плотность мощности шума
![]() ,
можно найти среднеквадратическое
отклонение ш
шума на выходе тракта приемного
устройства, имеющего полосу пропускания
F:
,
можно найти среднеквадратическое
отклонение ш
шума на выходе тракта приемного
устройства, имеющего полосу пропускания
F:
![]() .
(4.6.10)
.
(4.6.10)
Формирование отсчетов квадратурных компонентов шума производится по алгоритму [134]:
 (4.6.11)
(4.6.11)
где
![]() шc(n)
и
шs(n)
- первообразующие нормальные центрированные
и нормированные некоррелированные
случайные процессы, которые формируются
аналогично тому, как это описано в первой
главе.
шc(n)
и
шs(n)
- первообразующие нормальные центрированные
и нормированные некоррелированные
случайные процессы, которые формируются
аналогично тому, как это описано в первой
главе.
Отсчеты квадратур станционных помех принципиально не отличаются от отсчетов сигнала или шума. В модели принято две градации станционных помех. Первая градация относится к варианту, когда спектр станционной помехи попадает в полосу пропускания тракта частично. В этом случае отсчеты квадратур формируются точно также, как и отсчеты квадратур шумового компонента с соответствующим среднеквадратическим отклонением. Когда же спектр станционной помехи относительно хорошо согласуется с полосой пропускания приемного тракта, то в модели учитывается закон модуляции мешающего сигнала посторонней радиостанции. В этом случае формирование выборок квадратур станционных помех производится точно так же, как и для сигнала. Для простоты считается, что приходящие от посторонних радиостанций мешающие сигналы имеют однолучевое распространение. Считается также, что число станционных помех, которые одновременно попадают в полосу пропускания тракта промежуточной частоты приемного устройства, подчиняется усеченному закону Пуассона. Распределение помех вдоль оси частот принимается равномерным, а закон распределения ширины полос частот спектра помех считается логнормальным. Распределение способов модуляции станционных помех задается в виде отдельного массива, из которого конкретная реализация метода модуляции выбирается по случайному закону.
Имея квадратурные отсчеты по отдельно взятым помехам, можно сформировать результирующие отсчеты квадратур в виде сумм индивидуальных отсчетов:
 (4.6.12)
(4.6.12)
где Uспcj(nt) и Uспsj(nt) - квадратурные отсчеты j-ой станционной помехи.
Имея отсчеты квадратур на выходе тракта промежуточной частоты приемного устройства, соответственно, для шумового компонента помех, станционных помех и многолучевого сигнала, легко сформировать отсчеты квадратур результирующего напряжения:
Uрезc(n) = Uc(nt) + Uшc(n) + Uспc(nt), (4.6.13)
Uрезs(n) = Us(nt) + Uшs(n) + Uспs(nt).
При наличии в тракте РПУ нелинейных элементов требуется отсчеты суммы квадратур Uрез(n)= Uрезc(n) + Uрезs(n) функционально преобразовать в соответствии с ПХ НЭ с последующим определением значений квадратур результата преобразований методом дискретного преобразования Фурье. При этом необходимо увеличить в соответствующее число раз количество отсчетов сигнала на заданном интервале времени, например, длительности элемента сообщения, чтобы учесть влияние на конечный результат оценок квадратур сигнала наиболее значимых гармоник и интермодуляций сигнала и помех, которые появляются в результате их взаимодействия на ПХ НЭ.
Экзаменатор к. т. н, доцент В.Л. Хазан
Министерство образования Российской Федерации
Омский государственный технический университет
КАФЕДРА «СРЕДСТВА СВЯЗИ и ИНФОРМАЦИОННАЯ БЕЗОПАСНОСТЬ»
ДИСЦИПЛИНА «МОДЕЛИРОВАНИЕ СИСТЕМ СВЯЗИ»
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 8
1. Имитационно-аналитическая модель канала связи для передачи дискретных сообщений.
(из файла блок-схема, вроде оно, но может быть и глава 4).
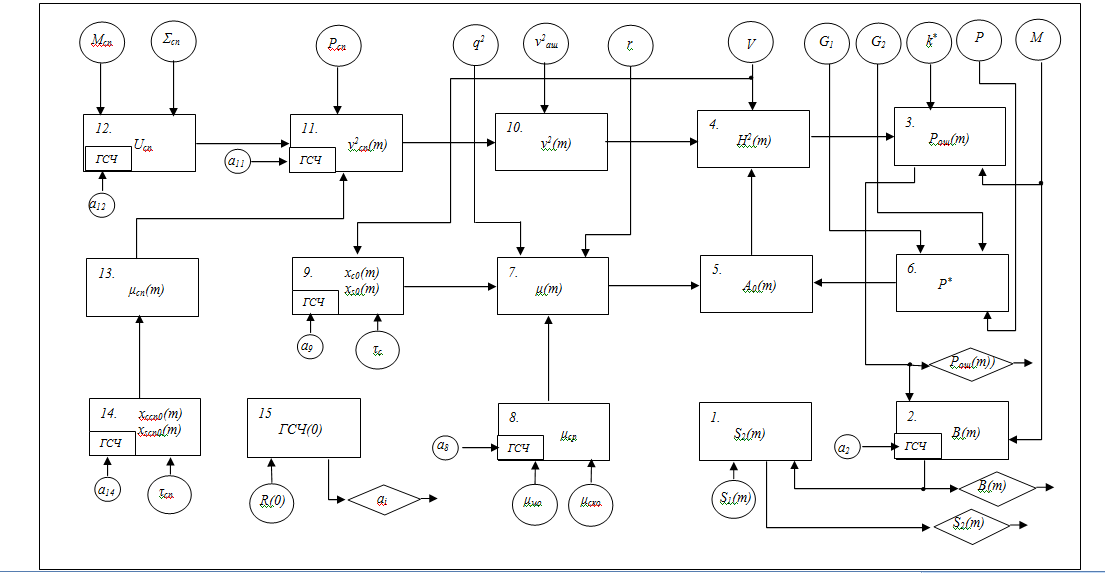
Рис. 1.3.2. Блок-схема имитационно-аналитической модели одномерного дискретного КС с переменными параметрами
Из рисунка 1.3.2 видно, что блок-схема модели включает в себя функциональные блоки, которые выдают соответствующие выходные данные, являющиеся либо окончательными, либо промежуточными, т. е. входными данными для соседних блоков.
Ниже описаны выдаваемые отдельными блоками выходные данные и алгоритмы их формирования.
Блок № 1 формирует сигнал S2(m) на выходе КС с учетом подаваемого извне на его вход сигнала S1(m) и потока ошибок B(m), формируемого блоком № 2. Алгоритм формирования сигнала S2(m) следующий:
S2(m) = |S1(m) - B(m)|. (1.4.2)
Блок № 2 формирует поток ошибок элементов B(m) с учетом зависимости от времени вероятности ошибок Pош(m), текущее значение которых поступает с выхода блока № 3. Алгоритм получения потока ошибок следующий:
B(m) = ent[R2(m)+Pош(m)]. (1.4.3)
Здесь ent[x] – целая часть числа x,
R2(m) – случайные числа вспомогательного ГСЧ блока № 2.
В этом же блоке учитывается сдваивание ошибок, которое происходит в режиме ОФТ. В этом случае алгоритм формирования потока ошибок дополняется следующими операциями:
B(m)=|b(m) – b(m-1)|, (1.4.4)
b(m)=ent[R1(m)+Pош, фт(m)], (1.4.5 )
![]() ,
(1.4.6)
,
(1.4.6)
где Рошофт – вероятность ошибки элемента при приеме ОФТ сигналов; а Рошфт - вероятность ошибки элемента при приеме ФТ сигналов (в случае реализации этого режима работы).
Блок № 3 формирует значение вероятности ошибок элементов в соответствии с алгоритмом:
![]() ,
(1.4.7)
,
(1.4.7)
где
![]() ;
M
= 4 для АТ, М
= 2 для ЧТ и
М =
1 для ОФТ,
;
M
= 4 для АТ, М
= 2 для ЧТ и
М =
1 для ОФТ,
H2(m) – отношение энергии активного элемента сигнала к спектральной плотности мощности помех, k* - коэффициент энергетических потерь в дБ.
Блок № 4 формирует значения отношений сигнал/помеха H2(m) в соответствии с алгоритмом:
![]() .
(1.4.8)
.
(1.4.8)
Здесь V – скорость манипуляции [Бод],
ν2(m) – спектральная плотность мощности помех,
A0(m) – амплитуда сигнала, поступающего на вход РПУ.
Блок № 5 формирует значение амплитуды сигнала A0(m) в соответствии с алгоритмом:
![]() ,
,
где P* - эквивалентная мощность сигнала, поступающая от передатчика с учетом коэффициентов усиления антенн на передающей и приемной стороне радиолинии,
μ(m) – коэффициент передачи КС.
Блок № 6 формирует значение эквивалентной мощности сигнала P*:
P*=P·G1·G2, (1.4.9)
где P – мощность передатчика [Вт],
G1 – коэффициент усиления передающей антенны,
G2 - коэффициент усиления приемной антенны.
Блок № 6 – конечный. Он не зависит от выходных данных других блоков.
Блок № 7 формирует коэффициент передачи КС μ(m), который изменяется во времени по случайному закону, соответствующему изменению модуля вектора двухмерного марковского нормального процесса:
![]() ,
(1.4.10)
,
(1.4.10)
где μср – значение СКО распределения коэффициента передачи;
q – значение МО квадратуры, нормированное в СКО;
r
– коэффициент взаимной корреляции
квадратурных компонентов двухмерного
марковского нормального процесса,
![]() и
и
![]() - первообразующие нормированные и
центрированные марковские нормальные
процессы.
- первообразующие нормированные и
центрированные марковские нормальные
процессы.
Блок № 8 формирует для очередного сеанса связи СКО параметра μср в предположении, что оно распределено по логарифмически-нормальному закону (в дБ):
![]() ,
(1.4.11)
,
(1.4.11)
где
![]() ,
,
Здесь R81 и R82 – случайные числа от вспомогательного ГСЧ блока № 8,
μмо и μско – МО и СКО параметра μср.
Блок № 9 формирует первообразующие случайные марковские процессы и с помощью следующих рекуррентных уравнений:
![]() ,
(1.4.12)
,
(1.4.12)
![]() .
(1.4.13)
.
(1.4.13)
Здесь
![]() - коэффициент автокорреляции процесса,
- коэффициент автокорреляции процесса,
Ec(m) = ρ(m)cos(2πR91(m)), Es(m) = ρ(m)sin(2πR91(m)),
![]() ,
,
τ – время корреляции замираний,
V – скорость манипуляции,
R91(m) и R92(m) – случайные числа, формируемые ГСЧ блока № 9.
Блок № 10 формирует значение спектральной плотности мощности помех, которая содержит компоненты, соответствующие атмосферному шуму и сигналам посторонних радиостанций:
ν2(m) = ν2аш + ν2сп(m), (1.4.14)
где ν2аш – спектральная плотность мощности атмосферного шума,
ν2сп спектральная плотность мощности станционных помех.
Блок № 11 определяет значение спектральной плотности мощности станционных помех с учетом вероятности их появления Pсп по следующему алгоритму:
![]() ,
(1.4.15)
,
(1.4.15)
где Pсп – вероятность поражения КС станционной помехой,
R11 – случайное число, генерируемое ГСЧ блока № 11,
μсп(m) – коэффициент замираний станционной помехи,
Uсп – средний уровень станционных помех в полосе частот Δf = 1 кГц.
Блок № 12 формирует уровни станционных помех, которые считаются распределенными по логарифмически-нормальному закону:
![]() .
(1.4.16)
.
(1.4.16)
Здесь ρсп
=![]() ,
,
R121 и R122 – случайные числа (поступают от ГСЧ блока № 12),
Mсп и Σсп соответственно МО и СКО логнормального закона распределения уровней станционных помех, задаваемых в дБ.
Блок № 13 определяет коэффициенты замираний станционных помех μсп(m) принимая закон их замираний релеевским. В этом случае:
![]() ,
(1.4.17)
,
(1.4.17)
где
![]() и
и
![]() -
первообразующие нормированные марковские
нормальные процессы.
-
первообразующие нормированные марковские
нормальные процессы.
Блок № 14 формирует первообразующие процессы для коэффициента замираний станционных помех в предположении, что эти процессы марковские:
![]() ,
(1.4.18)
,
(1.4.18)
![]() .
(1.4.19)
.
(1.4.19)
Здесь
![]() - коэффициент автокорреляции замираний
станционных помех,
- коэффициент автокорреляции замираний
станционных помех,
Ecп,с(m) = ρсп(m)cos(2πR141(m)), Eсп,s(m) = ρсп(m)sin(2πR141(m)),
![]() ,
,
τсп – время автокорреляции замираний станционных помех,
V – скорость манипуляции передаваемого сигнала, определяющая интервалы между отсчетами,
R141(m) и R142(m) – случайные числа, формируемые ГСЧ блока № 14.
Блок № 15 является вспомогательным ГСЧ, который определяет значения начальных случайных чисел для ГСЧ всех блоков, которые обусловлены единственным начальным числом R(0).
Экзаменатор к. т. н, доцент В.Л. Хазан
Министерство образования Российской Федерации
Омский государственный технический университет
КАФЕДРА «СРЕДСТВА СВЯЗИ и ИНФОРМАЦИОННАЯ БЕЗОПАСНОСТЬ»
ДИСЦИПЛИНА «МОДЕЛИРОВАНИЕ СИСТЕМ СВЯЗИ»
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 9
1. Моделирование каналов связи с различными видами разнесенного приема.
Имитационная модель трассовых испытаний КВ систем связи с приемом разнесенных сигналов М етоды разнесения сигналов по времени, частоте, в пространстве, по поляризации и т. д. являются эффективными способами повышения надежности приема передаваемых сообщений. П ередача сообщений с разнесением сигналов может иметь активный и пассивный характер. В случае активного разнесения в организации разнесенных сигналов принимает участие передающая сторона радиолинии. Примерами такого рода разнесения могут быть разнесения: по времени, по частоте ичастотно-временное. Разнесение по времени - наиболее простой вид, который практически сводится к повторной передаче сообщения на одной и той же рабочей частоте через некоторое время, превышающее время автокорреляции замираний сигнала. Разнесение по частоте - более сложный вид, который с целью декорреляции помех в ветвях разнесения предусматривает одновременную передачу сообщений на двух или большем числе достаточно далеко отстоящих друг от друга частот. При частотно-временном разнесении сообщений повторные передачи сигналов производятся на далеко отстоящих друг от друга частотах. Первый вариант разнесения (по времени) наименее эффективный, так как повторение сообщения на одной и той же частоте может сопровождаться одними и теми же станционными помехами, присутствующими на этой частоте. Кроме того, он связан с дополнительными затратами времени и энергии на повторные передачи. Второй вариант разнесения (по частоте) более эффективен, так как передача сообщений на разных частотах повышает вероятность благополучного завершения сеанса связи благодаря тому, что одновременное поражение станционными помехами всех частот, на которых параллельно передается сигнал, маловероятно. При этом относительно легко организуется автоматическое сложение разнесенных сигналов. Однако разнесение по частоте может быть связано с энергетическими потерями в отдельных ветвях разнесения. Так, например, передача ЧТ сигналов параллельно на двух частотах приводит к потере мощности от двух до четырех раз на каждой из этих частот по сравнению с одним каналом. Это замечание не относится к случаю передачи на двух частотах АТ сигналов с инверсными по отношению друг к другу манипулирующими бинарными последовательностями. Последний случай равносилен передаче одиночного ЧТ сигнала с большой девиацией частоты и с индивидуальным приемом сигналов на поднесущих частотах как двух индивидуальных сигналов АТ. Третий вариант разнесения (частотно-временное) является наиболее эффективным. Этот вариант, как и первый, требует дополнительных затрат времени и энергии, но, в отличие от первого варианта, повторные передачи сообщений производятся на новых достаточно далеко отстоящих друг от друга частотах, что позволяет избежать поражения этих частот одной и той же станционной помехой. В третьем варианте (в отличие от второго) передача сообщения в каждой ветви разнесения производится с максимально возможным уровнем мощности, что при реализации оптимальных методов сложения разнесенных сигналов позволяет получить наиболее высокую надежность приема сообщения. В случае пассивных методов передающая сторона не принимает участия в организации ветвей разнесения. Примерами пассивных методов разнесения могут служить пространственное разнесение и разнесение по поляризации. При пространственном разнесении прием осуществляется на антенны, разнесенные в пространстве на расстояние, которое превышает длину волны. При разнесении по поляризации прием осуществляется на антенны, имеющие разные поляризационные характеристики. И в том и в другом случае в ветвях разнесения присутствуют одни и те же станционные помехи, что в первом приближении аналогично случаю разнесения по времени. Пассивные методы разнесения требуют дополнительной приемной аппаратуры (антенно-фидерных трактов, приемных устройств и т. д.). С ложение сигналов при разнесенном приеме может осуществляться различными методами. Самым простым методом сложения является автовыбор сообщения, принятого с наиболее высоким качеством. Этот метод широко применяется при передаче коротких сообщений, когда длительность отдельного сообщения много меньше периода замираний сигнала и станционных помех. Другой достаточно простой и эффективный метод сложения разнесенных сигналов состоит в том, что производится автовыбор элементов, знаков или отдельных участков сообщений, которые принимаются в данный момент времени с наиболее высоким качеством. Степень эффективности в этом случае зависит от критерия и метода оценки качества принимаемых сообщений. Наилучшим критерием является отношение сигнал/помеха. Но этот критерий не может быть оценен непосредственно. Косвенная оценка отношения сигнал/помеха может быть произведена, например, по частости обнаружения искажений в кодовых комбинациях (за счет кодовой избыточности) или по величине краевых искажений сигнала на выходе демодулятора приемного устройства. З ная отношение сигнал/помеха, можно повысить эффективность приема разнесенных сигналов за счет весового сложения сигналов [ 32 ]. Н а рис. 6.1 изображена блок-схема обобщенного алгоритма функционирования фрагмента программы , обеспечивающего имитацию разнесенного приема сообщений с автовыбором телеграмм. Приведенному алгоритму соответствует программа "FEDING-3", которая имитирует случай автовыбора разнесенных сообщений. Критерием автовыбора является количество стертых знаков при условии использования семиэлементного кода с проверкой на четность. Особенностью программы "FEDING-3" является то, что в случае приема первой телеграммы считается, что сеанс связи прошел успешно и дублирующая телеграмма не передается. Это дает возможность существенно экономить машинное время.
Рис. 6.1
Н а рис. 6.2 изображена блок-схема обобщенного алгоритма функционирования фрагмента программы, обеспечивающего имитацию разнесенного приема сообщений с автовыбором элементов, имеющих наибольшую достоверность. Этому алгоритму соответствует программа "FEDING-4", которая имитирует разнесенный прием сигналов с автовыбором наиболее достоверных элементов сообщения. В этом случае за критерий оценки достоверности приема элементов принято отношение сигнал/помеха, что безусловно является идеализацией. Однако этот вариант программы имеет практическое значение, так как позволяет оценить предельные возможности метода автовыбора элементов и энергетический проигрыш тех или других методов сложения разнесенных сигналов по сравнению с идеальным вариантом сложения методом автовыбора наиболее достоверных элементов.
Данная модель рассчитана на следующие варианты:
помехи в ветвях разнесения независимы и сигналы замирают независимо друг от друга (вариант частотно-разнесенного приема);
помехи в ветвях разнесения независимы, а замирания сигнала коррелированные (вариант частотно-разнесенного приема с общими замираниями);
помехи в ветвях разнесения имеют одинаковые средние уровни, но вместе с сигналом замирают независимо друг от друга (вариант приема на разнесенные антенны);
помехи в ветвях разнесения имеют одинаковые средние уровни и замирают независимо друг от друга в то время, как сигналы замирают коррелированно (вариант приема на разнесенные антенны);
помехи в ветвях разнесения имеют одинаковые средние уровни и замирают коррелированно в то время, как сигналы замирают независимо друг от друга (вариант приема на разнесенные антенны).
Рис. 6.2
Экзаменатор к. т. н, доцент В.Л. Хазан
Министерство образования Российской Федерации
Омский государственный технический университет
КАФЕДРА «СРЕДСТВА СВЯЗИ и ИНФОРМАЦИОННАЯ БЕЗОПАСНОСТЬ»
ДИСЦИПЛИНА «МОДЕЛИРОВАНИЕ СИСТЕМ СВЯЗИ»
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 10
Моделирование канала связи с медленными замираниями.
(как в билете 2, замирания будут медленными при большом коэффициенте автокорреляции, сюда по сути надо рассказать главу 3)
Экзаменатор к. т. н, доцент В.Л. Хазан
Министерство образования Российской Федерации
Омский государственный технический университет
КАФЕДРА «СРЕДСТВА СВЯЗИ и ИНФОРМАЦИОННАЯ БЕЗОПАСНОСТЬ»
ДИСЦИПЛИНА «МОДЕЛИРОВАНИЕ СИСТЕМ СВЯЗИ»
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 11
1. Имитационно-аналитическая модель для определения вероятности ошибок в дискретном канале связи с амплитудной, частотной и относительной фазовой манипуляцией.
Имитационная модель трассовых испытаний КВ систем связи при работе на случайных частотах Ц елью трассовых испытаний, как правило, является оценка надежности связи или так называемого коэффициента исправного действия (КИД) системы (процент телеграмм, принятых с качеством, не хуже заданного) и сравнение КИД одной системы (обычно вновь разработанной) с другой (обычно уже долгое время эксплуатируемой в данных условиях связи). В качестве "опорной" системы, например, часто берется вариант канала связи ЧТ-125, который широко используется многими ведомствами на различных радиолиниях и возможности которого всем хорошо известны. Основным критерием сравнения разных систем связи является средний энергетический выигрыш (проигрыш) одной системы относительно другой при работе на трассе по возможности в одинаковых условиях. Испытания для этого проводят при различных мощностях передающих устройств и определяют зависимости КИД от мощности передатчиков. Зная эти зависимости, можно легко оценить энергетический выигрыш той или другой системы связи по отношению к любой другой в данных условиях связи. Описанная методика проведения трассовых испытаний положена в основу разработанной программы "FEDING-2". Эта программа построена на базе предыдущей (FEDING-1) с той разницей, что из нее исключены элементы для исследования законов распределения замираний сигнала, и сеансы проводятся не одиночно, а группой в заданном количестве, достаточном для определения КИД с необходимой достоверностью. Заметим, что с предыдущей программой также можно проводить вычислительные эксперименты с имитацией трассовых испытаний, но отсутствие автоматизации по организации последовательности сеансов связи и автоматизации обработки полученных данных в этом случае требует больших трудозатрат, практически сравнимых с трудозатратами при ручной обработке результатов подобных экспериментов на реальной трассе. Программа "FEDING-2" отличается тем, что в ней автоматизированы процессы организации последовательности сеансов связи и обработки результатов с выводом протокола отдельно взятых испытаний в соответствующий файл, на дисплей и на принтер. Процесс испытаний сопровождается отображением ситуации на дисплее, на котором демонстрируются в виде текущего графика отношение сигнал/помеха, уровень станционных помех и вектор ошибок для различных видов манипуляции. КИД определяется для заданного вида манипуляции при условии приема телеграмм без искажений.
Входными данными программы являются:
вид манипуляции;
скорость манипуляции;
число знаков в телеграмме;
номер испытаний;
количество циклов в испытаниях с различной мощностью сигнала;
количество телеграмм в одном цикле испытаний;
время корреляции замираний сигнала и помех;
вероятность поражения канала связи станционной помехой;
МО распределения станционных помех в децибелах;
СКО распределения станционных помех в децибелах;
спектральная плотность мощности шума;
коэффициент корреляции Ккор квадратур случайной составляющей сигнала, определяющий характер закона замираний сигнала;
начальное квазислучайное число;
среднее значение амплитуды флуктуирующего компонента сигнала;
амплитуда регулярной составляющей сигнала Ар;
коэффициент изменения мощности сигнала при смене цикла испытаний.
Выходными данными программы является зависимость процента принятых сообщений с качеством не ниже указанного значения:
безошибочный прием сообщения;
прием сообщения с процентом ошибочно принятых знаков не более, чем 1, 2, 3, 4, 5, 10, 20, 30, 40, 50, 60, 70, 80, 90 и 100%.
Д анная программа, аналогично предыдущей, позволяет имитировать релеевские, райсовские, усеченные односторонние нормальные и другие виды замираний. В программе предусмотрено запоминание исходных данных текущего сеанса, что дает возможность, в случае необходимости, его повторного проведения и продолжения испытаний с прерванного момента времени. П рограмма запоминает основные начальные исходные данные и позволяет организовывать повторные пуски с минимальной коррекцией вводимых параметров (количество циклов и т. п.). Это дает возможность производить пробные пуски перед началом зачетных испытаний, что дополнительно страхует пользователя от непреднамеренных ошибок при вводе данных. Положительной особенностью программы является то, что при увеличении мощности передатчика в последующих циклах испытаний те сеансы, которые приняты в предыдущем цикле испытаний при меньшей мощности передатчика, не повторяются, так как при увеличении мощности не может быть ухудшения качества приема сообщения (процессы в соответствующих номерах сеансов абсолютно идентичны, за исключением уровня сигнала). За счет этого при проведении последующих циклов испытаний происходит существенная экономия машинного времени. Кроме того, в программе предусмотрен форсированный режим испытаний, когда сеанс проводится до момента возникновения заданного числа ошибок и после их появления сразу же прерывается. В этом случае КИД соответствует только тому числу телеграмм, которые приняты с числом ошибок не более заданного. К од программы: 7-элементный. Если требуется использование других кодов, то необходимо разработать новый блок подпрограммы, соответствующий декодеру. В программе предусмотрен демонстрационный режим работы, параметры которого могут быть подготовлены заранее с целью экономии времени при демонстрации работы модели. Б лок-схема обобщенного алгоритма программы "FEDING-2" приведена на рис. 5.1.
Экзаменатор к. т. н, доцент В.Л. Хазан
Министерство образования Российской Федерации
Омский государственный технический университет
КАФЕДРА «СРЕДСТВА СВЯЗИ и ИНФОРМАЦИОННАЯ БЕЗОПАСНОСТЬ»
ДИСЦИПЛИНА «МОДЕЛИРОВАНИЕ СИСТЕМ СВЯЗИ»
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 12
Особенности имитационного моделирования дискретного канала связи, использующего сигналы с относительной фазовой манипуляцией.