

Выбор строительных машин
Для подбора строительных машин необходимо знать объемы работ, размеры земляных сооружений (для экскаваторов), максимальную массу монтируемых элементов, их габариты и проектное положение в сооружении (для кранов).
Выбор экскаваторов для разработки котлованов под основание емкостных сооружений производится в зависимости от габаритов выемки, вида грунта и его строительных свойств, гидрогеологических условий и способа разработки (в отвал или на автотранспорт).
Экскаватор с прямой лопатой (рис. 5.1, а) используется при разработке выемок в сухих и маловлажных грунтах, что связано с необходимостью съезда на дно выемки.

Рис.
5.1. Схемы
забоев экскаваторов с различным рабочим
оборудованием: а
− прямая лопата; б – обратная лопата;
в – драглайн; г – грейфер;
![]() − радиус копания или резания;
− радиус копания или резания;
![]() –
радиус выгрузки;
–
радиус выгрузки;
![]() –
высота копания;
–
высота копания;
![]() –
глубина копания; Hв
– высота выгрузки;
–
глубина копания; Hв
– высота выгрузки;
![]() – радиус платформы экскаватора;
– радиус платформы экскаватора;
![]() – радиус начала копания
– радиус начала копания
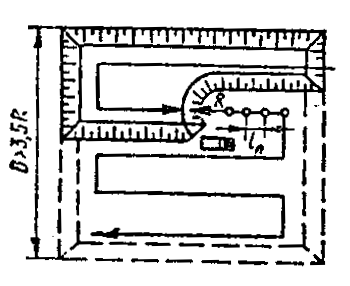
Узкие
котлованы (ширина котлована по верху
меньше радиуса копания
![]() в
1,5 раза:
в
1,5 раза:
![]() 1,5
1,5![]() )
разрабатывают лобовой проходкой с
односторонней погрузкой в транспорт
(рис. 5.2, а).
)
разрабатывают лобовой проходкой с
односторонней погрузкой в транспорт
(рис. 5.2, а).
Широкие котлованы ( 3 ) разрабатывают уширенной лобовой проходкой с передвижкой экскаватора по зигзагу (рис. 5.2, в).

Рис. 5.2. Схемы разработки грунта экскаватором, оборудованным прямой лопатой: а – лобовая проходка с односторонней погрузкой в транспортную машину; б – то же, с двухсторонней погрузкой; в – уширенная лобовая проходка с зигзагообразным перемещением экскаватора; г – то же, с перемещением экскаватора поперек котлована; д – боковая проходка экскаватора
Очень
широкие котлованы (
![]() 3
)
разрабатывают вначале лобовой, затем
боковыми проходками (рис. 5.2, а, д).
3
)
разрабатывают вначале лобовой, затем
боковыми проходками (рис. 5.2, а, д).
Экскаватор с обратной лопатой (рис. 5.1, б) применяется при разработке выемок в увлажненных и мокрых грунтах, при этом экскаватор перемещается вверху забоя с копанием грунта ниже уровня стоянки (рис. 5.3).
Экскаватор-драглайн (рис. 5.1, в) имеет удлиненную стрелу и ковш, свободно подвешенный на тросе. Драглайн используют при устройстве глубоких выемок в сильно обводненных, сыпучих и неустойчивых грунтах. Грунт выбирают ниже уровня стоянки экскаватора.
Экскаватор с грейферным ковшом (рис. 5.1, г), свободно подвешенным на тросе, применяют при разработке выемок радиусом 8,00−24,00 м на глубину до 15,00 м. Чаще всего грейфер используют при устройстве опускных колодцев или выемок с вертикальными стенками.
а)
б) в)
г) д)

Рис. 5.3. Схемы разработки грунта экскаватором, оборудованного прямой лопатой: а − боковая проходка экскаватора; б, в – торцовая проходка вдоль котлована; г, д – проходка поперек котлована
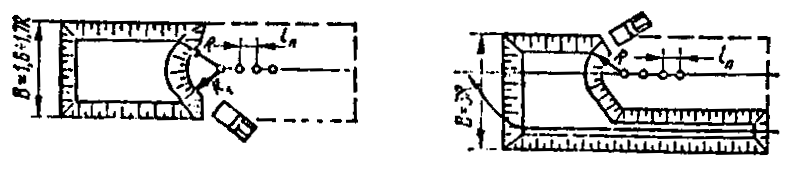
Монтажные
краны подбираются по их грузовым
характеристикам в соответствии со
схемой работы: по высоте подъема крюка
![]() ,
максимальному вылету стрелы
,
максимальному вылету стрелы
![]() и грузоподъемности
и грузоподъемности
![]() (рис. 5.4).
(рис. 5.4).
Рис. 5.4. Основные схемы монтажа: а – монтаж сооружений с габаритами до 15,00 м с передвижением крана и транспортных средств вокруг сооружений по берме котлована; б − монтаж сооружений с габаритами более 15,00 м с передвижением крана и транспортных средств по дну котлована за пределами сооружения; в – монтаж особо крупных сооружений с передвижением крана и транспортных средств по днищу сооружения; 1 – монтируемое сооружение; 2 – монтажный элемент; 3 – кран; 4 – панелевоз; 5 – грузовой автомобиль
При этом высота подъема определяется по формуле:
= |
(5.1) |
где − высота проектной опоры, м;
![]() −
свободный
просвет между опорой и поднятым элементом,
для емкостных сооружений
0,5
м;
−
свободный
просвет между опорой и поднятым элементом,
для емкостных сооружений
0,5
м;
![]() −
высота
монтажного элемента, м;
−
высота
монтажного элемента, м;
− высота захватных приспособлений, м;
![]() −
длина
сжатого полиспаста,
=
1,50 м.
−
длина
сжатого полиспаста,
=
1,50 м.
Минимальный вылет
крюка стрелы,
![]() :
:
= |
(5.2) |
где − радиус поворота платформы крана, м;
1,00 − просвет между краном и сооружением, м;
− толщина устанавливаемой конструкции, м.
Кроме
того, вылет крюка должен быть достаточным
для снятия конструкций с транспортных
средств,
![]() :
:
|
(5.3) |
где 1,00 − просвет между машинами, м;
− ширина базы панелевоза, м;
− расстояние от оси панелевоза до неснятой панели, м.
Из вычисленных значений, в качестве принимают большее.