Метод діаграм
Для
визначення характера переміщення
веденої ланки (рис. 2.2 а) використовують
діаграму. На осі абсцис (рис. 2.2 б) в
масштабі
 відкладають час одного цикла. При сталій
швидкості обертання
відкладають час одного цикла. При сталій
швидкості обертання
 .
По осі ординат відкладають лінійне
переміщення
.
По осі ординат відкладають лінійне
переміщення
 веденої ланки в масштабі
веденої ланки в масштабі
 або кутове переміщення
або кутове переміщення
 в масштабі
в масштабі
 для механізмів, у яких ведена ланка
обертається. Таким чином отримаємо
функцію
для механізмів, у яких ведена ланка
обертається. Таким чином отримаємо
функцію
 .
В якості початку відліку можна вибрати
одне з крайніх положень веденої ланки.
Метод має невисоку точність визначення
переміщення.
.
В якості початку відліку можна вибрати
одне з крайніх положень веденої ланки.
Метод має невисоку точність визначення
переміщення.
|
а |
|
б |
Рис. 2.2 |


Аналітичний метод
Метод має високу точність, застосовується при обчисленнях на ЕОМ, приводить до громіздких обчислень.
Використовується спосіб складання умови замкнутості всіх закритих контурів механізму (кожна ланка розглядається як вектор, а замкнутий контур - як векторний багатокутник (рис. 2.3)).
|
Рис. 2.3 |
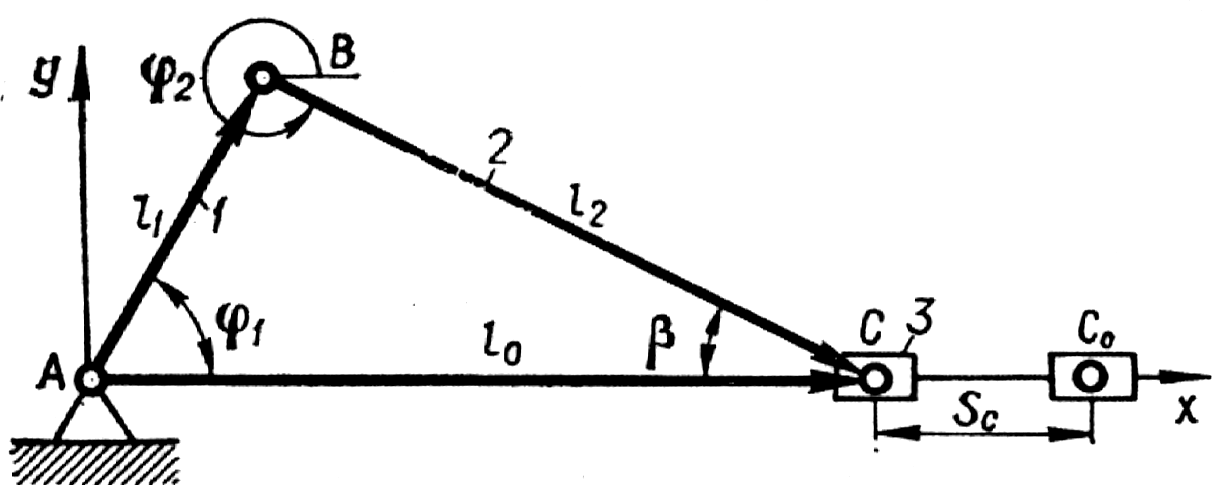
Рівняння замкнутості:


Це рівняння можна представити рівнянням проекцій векторів на систему координат хАу (початок системи координат знаходиться на осі обертання кривошипа А) у вигляді:

де
 ,
,
 - кути, які утворені ланками 1 та 2 із
віссю Ах;
- кути, які утворені ланками 1 та 2 із
віссю Ах;
 та
та
 - довжини ланок 1 та 2;
- довжини ланок 1 та 2;
 - положення ланки 3.
- положення ланки 3.
Використовуючи геометричні співвідношення контуру АВС отримаємо

Враховуючи залежність для , одержимо рівняння переміщення веденої ланки:

При інтегруванні:
 ,
,
 -
аналог кутової швидкості.
-
аналог кутової швидкості.
Лекція 4. Тема 2.2.
Визначення швидкостей ланок
Планом швидкостей механізму називається векторна діаграма, на якій зображені у вигляді відрізків вектори, однакові по модулю і напрямку з швидкостями різних точок ланок механізму в даний момент часу.
Побудова планів швидкостей проводиться на основі послідовного складання векторних рівнянь для всіх груп, що входять до складу механізму, починаючи із ведучої ланки. Спочатку потрібно вибрати загальну для двох ланок точку та записати для неї два рівняння для визначення її швидкості. Для визначення повної картини швидкостей будь-якої ланки, що входить у групу, досить знати лінійну швидкість двох точок цієї ланки або лінійну швидкість однієї точки й кутову швидкість ланки.
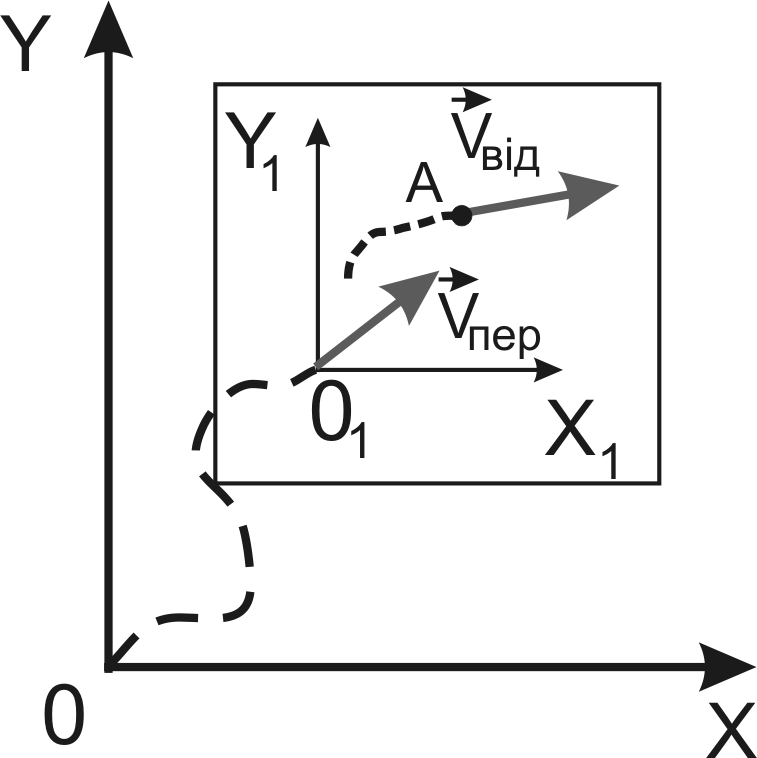
У методі планів швидкостей і прискорень використовується теорема про складний рух твердого тіла, який можна представити як суму переносного та відносного руху (рис.2.3 а).

Переносний
рух - рух
рухомої системи відліку ( рис. 2.3.а) відносно нерухомої системи
відліку (
рис. 2.3.а) відносно нерухомої системи
відліку ( рис.
2.3.а). Відносний
рух – рух
матеріальної точки відносно рухомої
системи відліку
(на рис.2.3
а, рух точки А відносно системи координат
).
У будь-який момент часу можна знайти
точку, жорстко пов'язану з тілом, швидкість
якої дорівнює нулю. Це миттєвий центр
обертання тіла або полюс
рис.
2.3.а). Відносний
рух – рух
матеріальної точки відносно рухомої
системи відліку
(на рис.2.3
а, рух точки А відносно системи координат
).
У будь-який момент часу можна знайти
точку, жорстко пов'язану з тілом, швидкість
якої дорівнює нулю. Це миттєвий центр
обертання тіла або полюс
 (рис.
2.3.б). Якщо тіло рухається поступально
то миттєвий центр обертання лежить на
(рис.
2.3.б). Якщо тіло рухається поступально
то миттєвий центр обертання лежить на
 .
Відносно цієї точки в даний момент часу
тіло здійснює обертовий рух зі швидкістю
.
Відносно цієї точки в даний момент часу
тіло здійснює обертовий рух зі швидкістю
 .
.
|
|
|
а |
б |
в |
Рис. 2.3 |
||


Перенесемо
вектори абсолютних швидкостей
 та
та
 в точку
в точку
 -полюс плану швидкостей (рис. 2.3 в).
-полюс плану швидкостей (рис. 2.3 в).
Одержимо план швидкості відрізка АВ у масштабі:


Для визначення швидкості точки С можна записати наступну систему:
 .
.
Припустимо, що ця швидкість відома, тоді
 .
.
З іншого боку
 ;
;  ;
; 
 або
або
 .
.
З'єднані
між собою кінці векторів абсолютних
швидкостей утворюють фігуру, подібну
до ланки та повернену до неї на кут
 .
.
Властивості планів швидкостей:
1. Вектори, які виходять із полюса, є абсолютними швидкостями.
2. Напрямок вектора - завжди від полюса.
3. На кінці вектора завжди точка, що відповідає швидкості точки ланки або кінематичної пари.
4. Вектори на планах швидкостей, які не проходять через полюс, є відносними швидкостями.
5. Напрямок відносних швидкостей на плані завжди від другого індексу до першого.
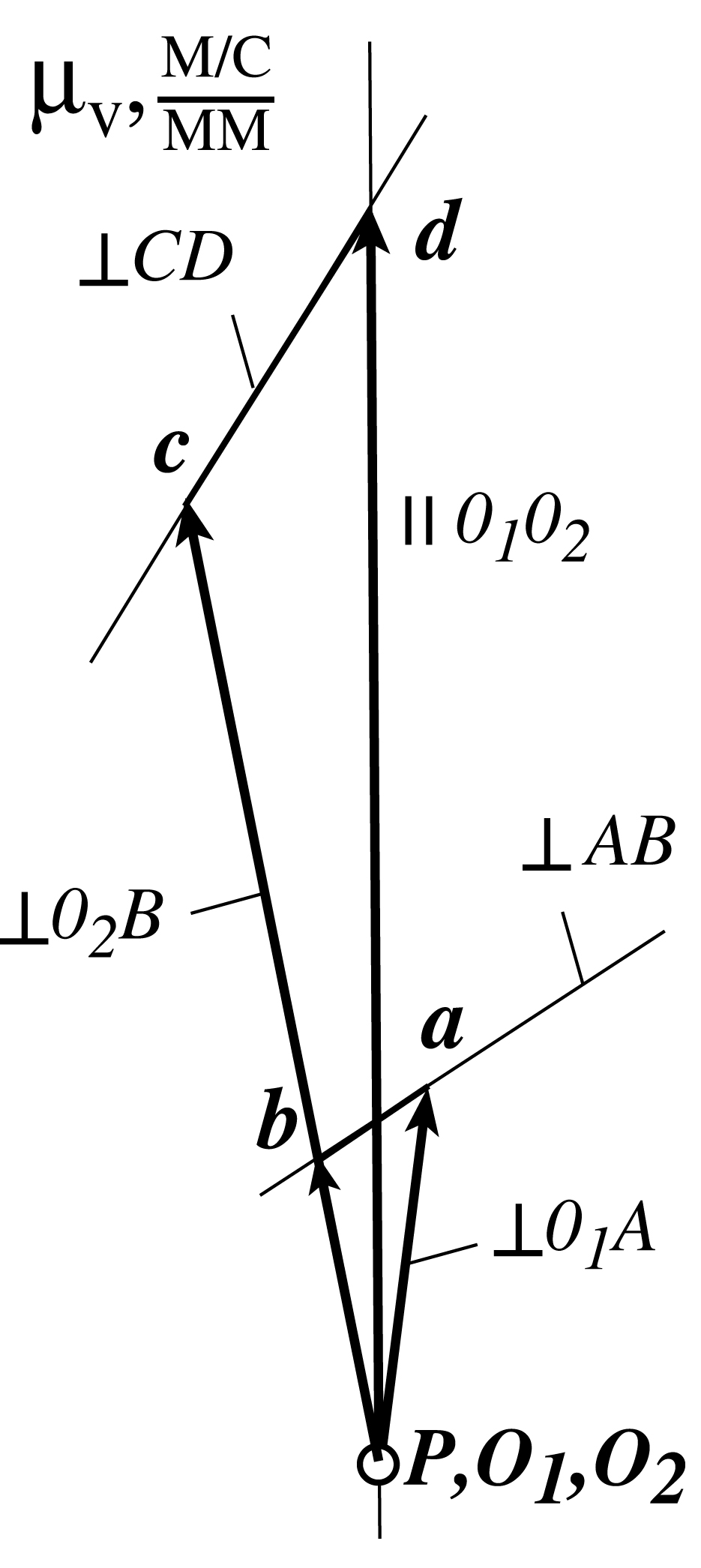
Приклад побудови плана швидкостей (рис.2.4).
У довільній точці вибираємо полюс . Цій точці відповідають кінематичні пари з нульовою швидкістю , і направляюча повзуна .
Таким чином, для точки можна записати рівняння
 ,
,
де
 - швидкість точки
,
а
- швидкість точки
,
а
 - швидкість точки
відносно
точки
.
У такий спосіб
- швидкість точки
відносно
точки
.
У такий спосіб
 ,
,
вектор направлений по дотичній до траєкторії руху точки , тобто перпендикулярно , у бік обертання кривошипа. При цьому кутова швидкість кривошипа визначається згідно залежності:
 ,
[c-1]
,
[c-1]
де
- частота обертання кривошипа
[хв-1].
Виходячи з вище сказаного,
на плані швидкостей (рис. 1.2) будуємо
пряму
 і на ній у масштабі відкладаємо точку
і на ній у масштабі відкладаємо точку
 (
( ,
,
 - масштабний коефіцієнт плану швидкостей),
що відповідає швидкості точки
.
- масштабний коефіцієнт плану швидкостей),
що відповідає швидкості точки
.
Для
визначення швидкості точки
 можна записати
наступну
систему:
можна записати
наступну
систему:
 ,
,
де
 - швидкість точки
,
- швидкість точки
,
 - швидкість точки
відносно
,
- швидкість точки
відносно
,
 - швидкість точки
відносно
.
- швидкість точки
відносно
.
Кутові
швидкості коромисла
 і шатуна
і шатуна
 нам не
відомі,
але нам відомі напрямки
і
.
Таким
чином
із
полюса
нам не
відомі,
але нам відомі напрямки
і
.
Таким
чином
із
полюса
 на плані швидкостей проводимо пряму
на плані швидкостей проводимо пряму
 ,
а із
точки
,
а із
точки
 проводимо пряму
проводимо пряму
 .
На перетині цих двох прямих лежить
точка
.
На перетині цих двох прямих лежить
точка
 ,
що відповідає абсолютній
швидкості точки
.
,
що відповідає абсолютній
швидкості точки
.
Використовуючи теорему подібності можна записати залежність:
 .
.
Із
полюса
через точку
проводимо відрізок
 .
Точка
.
Точка
 на плані швидкостей відповідає швидкості
точки
на плані швидкостей відповідає швидкості
точки
 на плані положення механізму.
на плані положення механізму.
Повзун
робить лінійне переміщення вздовж
вертикальних нерухомих направляючих
по осі, що проходить через точки
і
.
Для
швидкості
 можна записати векторне рівняння:
можна записати векторне рівняння:
 ,
,
де
 -
швидкість
точки
,
-
швидкість
точки
,
 - швидкість точки
відносно
.
- швидкість точки
відносно
.
Із
полюса
проводимо вертикальну пряму, паралельну
до
 ,
а з точки
,
на плані швидкостей, проводимо іншу
пряму, перпендикулярну шатуну
,
а з точки
,
на плані швидкостей, проводимо іншу
пряму, перпендикулярну шатуну
 .
На перетині цих прямих знаходиться
точка,
яка
відповідає лінійній
швидкості точки
.
А абсолютна величина
.
На перетині цих прямих знаходиться
точка,
яка
відповідає лінійній
швидкості точки
.
А абсолютна величина
 ,
,
де
 - масштаб плану швидкостей.
- масштаб плану швидкостей.
|
Рис. 2.4 План швидкості |