

9.5. Задачи
Задача 9.5. Если ось направить горизонтально, а ось вертикально вверх, то движение тяжелой точки (например, артиллерийского снаряда) у поверхности Земли в предположении, что сопротивление воздуха пропорционально скорости точки, будет описываться уравнениями
![]() ,
,
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() – постоянные величины.
– постоянные величины.
Найти модуль и направление скорости в
начальный момент времени. Найти наибольшую
высоту
![]() подъема точки над уровнем ее начального
положения, дальность
подъема точки над уровнем ее начального
положения, дальность
![]() по горизонтали от начального положения
точки до ее наивысшего положения.
по горизонтали от начального положения
точки до ее наивысшего положения.
Решение. На основании (9.12) имеем
![]() ,
,
![]() .
.
При
![]()
![]() ,
,
![]() ,
а модуль
,
а модуль
![]() скорости будет
скорости будет
![]() .
.
Направление скорости определим, найдя направляющие косинусы при :
![]()
Следовательно, начальная скорость, равная по модулю , направлена под углом к горизонту.
Так как точка траектории, где
![]() ,
соответствует наибольшей высоте подъема
движущейся точки, то из уравнения
,
соответствует наибольшей высоте подъема
движущейся точки, то из уравнения
![]()
мы определим момент времени
![]() достижения точкой наивысшей высоты.
Имеем
достижения точкой наивысшей высоты.
Имеем
![]() ;
;
отсюда
![]() .
.
Подставляя найденное значение в выражение для , получим искомую высоту
![]() .
.
Найдем теперь расстояние по горизонтали от начального положения точки до ее положения в наивысшей точке. Для этого подставим время в выражение для :
![]() .
.
З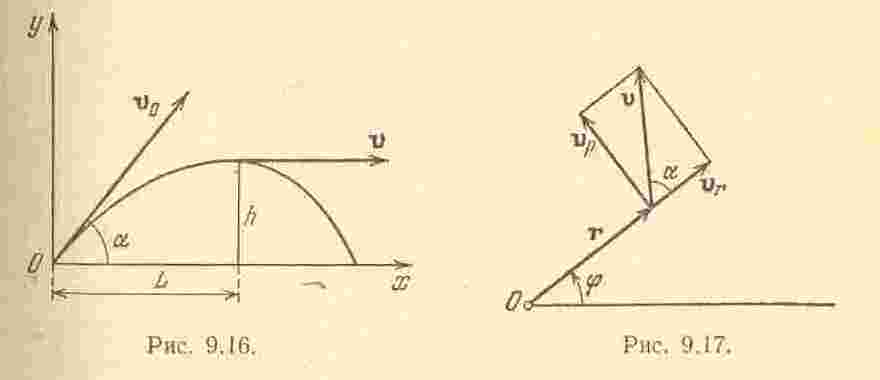 адача
9.6. Точка движется так, что ее
радиус-вектор образует со скоростью
постоянный угол. Определить уравнение
траектории в полярных координатах, если
угол, образуемый скоростью с
радиусом-вектором, равен
.
адача
9.6. Точка движется так, что ее
радиус-вектор образует со скоростью
постоянный угол. Определить уравнение
траектории в полярных координатах, если
угол, образуемый скоростью с
радиусом-вектором, равен
.
Решение. Согласно формуле (9.17) проекции скорости на радиальное и поперечное направления будут
, .
По условию задачи
![]() .
.
Следовательно,
![]() .
.
Отсюда
![]() .
.
Интегрируя это уравнение и приняв при
угол
![]() ,
получим
,
получим
![]() .
.
Тогда
![]() ,
где
,
где
![]() – модуль радиуса-вектора
в момент времени
.
Таким образом, траектория представляет
собой логарифмическую спираль.
– модуль радиуса-вектора
в момент времени
.
Таким образом, траектория представляет
собой логарифмическую спираль.
Если угол
![]() ,
то траектория будет прямолинейной –
движение будет происходить вдоль
радиуса-вектора. Если угол
,
то траектория будет прямолинейной –
движение будет происходить вдоль
радиуса-вектора. Если угол
![]() ,
то движение будет происходить по
окружности, так как
,
то движение будет происходить по
окружности, так как
![]() .
.
9.6. Ускорение точки
П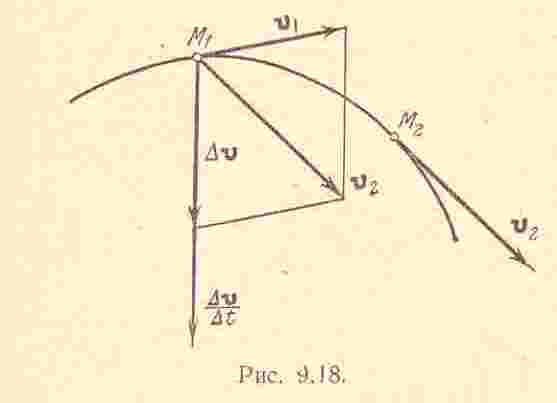 редположим,
что в момент времени
скорость точки равна
редположим,
что в момент времени
скорость точки равна
![]() ,
а в момент времени
будет
,
а в момент времени
будет
![]() .
Изменение вектора скорости за промежуток
времени
найдем как разность векторов
.
Изменение вектора скорости за промежуток
времени
найдем как разность векторов
![]() и
и
![]() ,
если параллельно перенесем вектор
в точку
.
,
если параллельно перенесем вектор
в точку
.
Вектор
![]() представляет собой приращение вектора
скорости за промежуток времени
.
представляет собой приращение вектора
скорости за промежуток времени
.
Отношение вектора
![]() к промежутку
называется средним
ускорением
точки за промежуток времени
:
к промежутку
называется средним
ускорением
точки за промежуток времени
:
![]() .
.
Ускорением
![]() точки в данный момент времени называется
предел
приращения скорости
к приращению
времени
при условии,
что последнее стремится к нулю, т.е.
точки в данный момент времени называется
предел
приращения скорости
к приращению
времени
при условии,
что последнее стремится к нулю, т.е.
![]() ,
(9.21) так как
,
(9.21) так как
![]() .
Можно также воспользоваться следующей
формой записи
.
Можно также воспользоваться следующей
формой записи
![]() .
.
Следовательно, ускорение точки в данный момент времени равно первой производной по времени от вектора скорости точки или второй производной по времени от радиуса-вектора точки.
Г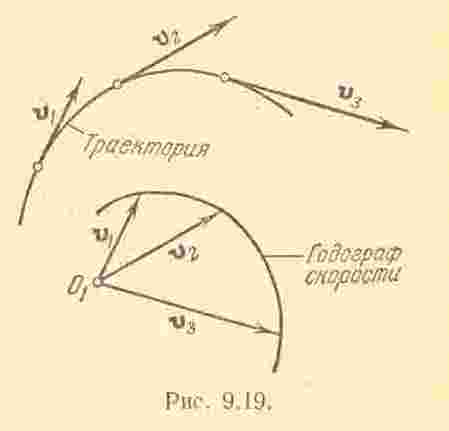 одографом
скорости называется
кривая, которую вычерчивает конец
вектора скорости при движении точки,
если вектор скорости проводится из
одной и той же точки.
одографом
скорости называется
кривая, которую вычерчивает конец
вектора скорости при движении точки,
если вектор скорости проводится из
одной и той же точки.
Очевидно, что
скорость точки, вычерчивающей годограф
скорости равна
![]() ,
т.е. ускорению точки при ее движении по
траектории. Размерность ускорения
,
т.е. ускорению точки при ее движении по
траектории. Размерность ускорения
![]() .
.
Единицами ускорения
могут быть
![]() ,
,
![]() .
.
Нахождение ускорения при координатном способе задания движения.
Пусть движение точки задано в прямоугольной системе координат:
, , .
Так как вектор скорости точки можно представить в виде
![]() ,
,
то на основании (9.21) будем иметь
![]() .
.
Пусть
![]() ,
,![]() ,
,
![]() – проекции ускорения на координатные
оси
;
тогда
– проекции ускорения на координатные
оси
;
тогда
![]() ,
,
![]() ,
,
![]() ,
(9.22) т.е. проекция
ускорения точки на какую-либо координатную
ось равна первой производной по времени
от соответствующей проекции скорости
точки.
,
(9.22) т.е. проекция
ускорения точки на какую-либо координатную
ось равна первой производной по времени
от соответствующей проекции скорости
точки.
Выражения (9.22) на основании (9.12) можно переписать в виде
![]() ,
,
![]() ,
,
![]() .
(9.23) Следовательно, проекция ускорения
точки на какую-либо координатную ось
равна второй производной по времени от
соответствующей координаты.
.
(9.23) Следовательно, проекция ускорения
точки на какую-либо координатную ось
равна второй производной по времени от
соответствующей координаты.
Модуль ускорения определяется по формуле
![]() .
(9.24)
.
(9.24)
Зная проекции ускорения и его модуль, легко находим направляющие косинусы вектора ускорения:
 (9.25)
(9.25)
Найдем теперь ускорение в полярных координатах. Пусть координаты точки заданы как функции времени
, .
Согласно (9.17) имеем
.
На основании (9.21) получим
![]() ,
,
но так как [см. (9.15) и (9.16)]
![]() ,
,
![]() ,
,
то
![]() .
.
Отсюда находим проекции ускорения на радиальное и поперечное направления
![]() ,
,
![]() .
(9.26)
.
(9.26)
Модуль и направление вектора ускорения определяются по формулам
![]() ,
,
![]() ,
,
![]() .
.
Нахождение ускорения при естественном способе задания движения.
Предварительно
познакомимся с необходимыми сведениями
из дифференциальной геометрии. Рассмотрим
пространственную кривую. Пусть
– единичный вектор касательной,
проведенной в какой-либо точке
этой кривой. Возьмем теперь на кривой
точку
,
близкую к точке
,
и обозначим единичный вектор касательной
в этой точке через
![]() .
Параллельно перенеся вектор
в точку
,
проведем плоскость через векторы
и
,
приложенные в точке
.
.
Параллельно перенеся вектор
в точку
,
проведем плоскость через векторы
и
,
приложенные в точке
.
П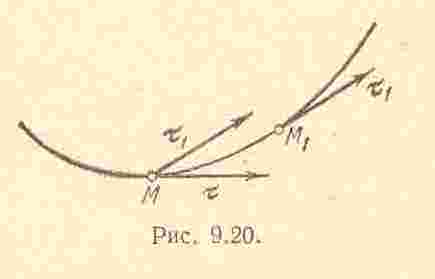 ри
стремлении точки
к точке
эта плоскость в пределе займет определенное
положение. Полученную таким образом
плоскость называют соприкасающейся
плоскостью
в точке
.
Отметим, что если рассматриваемая кривая
плоская, то она целиком будет расположена
в соприкасающейся плоскости.
ри
стремлении точки
к точке
эта плоскость в пределе займет определенное
положение. Полученную таким образом
плоскость называют соприкасающейся
плоскостью
в точке
.
Отметим, что если рассматриваемая кривая
плоская, то она целиком будет расположена
в соприкасающейся плоскости.
Плоскость, проведенную через точку перпендикулярно касательной, называют нормальной плоскостью.
Линия пересечения соприкасающейся плоскости и нормальной плоскости определяет главную нормаль к кривой в точке .
Плоскость, проведенную через точку перпендикулярно главной нормали, называют спрямляющей плоскостью. На рис. соприкасающаяся, нормальная и спрямляющая плоскости обозначены соответственно цифрами I, II и III.
Л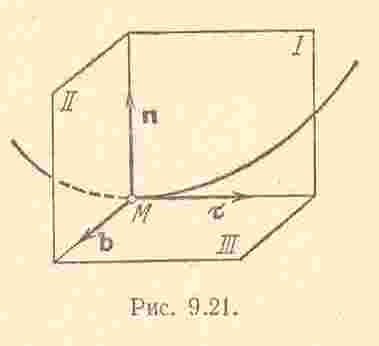 иния
пересечения спрямляющей плоскости и
нормальной плоскости определяет
бинормаль
к кривой.
иния
пересечения спрямляющей плоскости и
нормальной плоскости определяет
бинормаль
к кривой.
Таким образом, в каждой точке можно указать три взаимноперпенди-кулярных направления: касательной, главной нормали и бинормали. Принимая эти направления за координатные оси, введем единичные векторы этих осей.
Единичный вектор
касательной
нами уже был введен. Единичный вектор
![]() ,
направленный
в сторону вогнутости кривой,
будет единичным вектором главной
нормали. Направление единичного вектора
бинормали
,
направленный
в сторону вогнутости кривой,
будет единичным вектором главной
нормали. Направление единичного вектора
бинормали
![]() определим из требования, чтобы касательная,
главная нормаль и бинормаль, направления
которых определяются векторами
,
,
,
образовывали правую систему координат.
Полученный трехгранник, составленный
из соприкасающейся, нормальной и
спрямляющей плоскостей, называется
естественным
трехгранником.
Векторы
,
,
являются единичными векторами осей
естественного трехгранника.
определим из требования, чтобы касательная,
главная нормаль и бинормаль, направления
которых определяются векторами
,
,
,
образовывали правую систему координат.
Полученный трехгранник, составленный
из соприкасающейся, нормальной и
спрямляющей плоскостей, называется
естественным
трехгранником.
Векторы
,
,
являются единичными векторами осей
естественного трехгранника.
Обозначим через
![]() величину угла между вектором
,
проведенным в точке
,
и вектором
,
проведенным в точке
,
близкой к точке
.
Этот угол называется углом
смежности.
величину угла между вектором
,
проведенным в точке
,
и вектором
,
проведенным в точке
,
близкой к точке
.
Этот угол называется углом
смежности.
Кривизной
кривой в точке
называют
предел отношения угла смежности
к абсолютному значению длины дуги
![]() ,
т.е.
,
т.е.
![]() .
(9.27)
.
(9.27)
Радиусом кривизны кривой в точке называется величина, обратная кривизне
![]() .
(9.28)
.
(9.28)
Заметим, что
кривизна прямой равна нулю, а ее радиус
кривизны равен бесконечности. Кривизна
окружности во всех ее точках одинакова
и равна обратной величине радиуса
![]() ;
радиус кривизны равен радиусу окружности
;
радиус кривизны равен радиусу окружности
![]() .
.

Если через точку кривой и две близкие к ней точки провести окружность, то при стремлении этих точек к в пределе получится окружность, которая называется кругом кривизны. Круг кривизны лежит в соприкасающейся плоскости. Радиус круга равен радиусу кривизны кривой в точке . Центр круга кривизны лежит на главной нормали и называется центром кривизны.*
Вектор скорости согласно выражению (9.20) можно представить в виде
![]() ,
,
где
![]() – проекция скорости на направление
.
На основании формулы (9.21) имеем
– проекция скорости на направление
.
На основании формулы (9.21) имеем
![]() .
(9.29)
.
(9.29)
Определим величину
и направление вектора
![]() .
.
Пусть в момент времени точка находится в положении на траектории, а в момент времени – в положении . Перенося вектор в точку , найдем приращение вектора за промежуток времени
![]() .
.
Вектор
![]() при движении точки в сторону положительного
отсчета дуги направлен в сторону
вогнутости траектории, а при движении
точки в сторону отрицательного отсчета
дуги – в сторону выпуклости траектории.
при движении точки в сторону положительного
отсчета дуги направлен в сторону
вогнутости траектории, а при движении
точки в сторону отрицательного отсчета
дуги – в сторону выпуклости траектории.
Найдем производную вектора :
![]() .
.
Вектор
![]() всегда направлен в сторону вогнутости
траектории и лежит в плоскости, проходящей
через точку
и векторы
и
(плоскость МАВ).
Следовательно, вектор
всегда направлен в сторону вогнутости
траектории и лежит в плоскости, проходящей
через точку
и векторы
и
(плоскость МАВ).
Следовательно, вектор
![]() лежит в соприкасающейся плоскости, так
как при
лежит в соприкасающейся плоскости, так
как при
![]() плоскость МАВ
совпадает с соприкасающейся плоскостью
к траектории в точке
.
плоскость МАВ
совпадает с соприкасающейся плоскостью
к траектории в точке
.
Дифференцируя
тождество
![]() по
,
получим
по
,
получим
![]() ,
,
т.е. скалярное
произведение
на
![]() равно нулю, а это значит, что вектор
перпендикулярен
.
Таким образом, вектор
лежит в соприкасающейся плоскости,
направлен в сторону вогнутости траектории
и перпендикулярен
;
следовательно, он направлен по главной
нормали к центру кривизны.
равно нулю, а это значит, что вектор
перпендикулярен
.
Таким образом, вектор
лежит в соприкасающейся плоскости,
направлен в сторону вогнутости траектории
и перпендикулярен
;
следовательно, он направлен по главной
нормали к центру кривизны.
Определим теперь модуль вектора . Из равнобедренного треугольника АМВ найдем
![]()
или, используя равенства (9.27) и (9.28), получим
 .
.
Учитывая, что есть единичный вектор главной нормали, будем иметь
![]() .
.
Значит,
![]() ,
,
и, следовательно,
![]() ,
(9.30) так как
,
(9.30) так как
![]()
Из этой формулы следует, что вектор ускорения лежит в соприкасающейся плоскости.
Составляющие ускорения по направлениям и соответственно равны
![]() ,
,
![]() .
.
Проекция ускорения на направление
![]() (9.31)
(9.31)
называется касательным (тангенциальным) ускорением. Проекция ускорения на главную нормаль
![]() (9.32)
(9.32)
называется нормальным ускорением. Касательное ускорение характеризует изменение модуля скорости, а нормальное ускорение характеризует изменение скорости по направлению.
Модуль вектора ускорения равен
 .
(9.33)
.
(9.33)
Касательное
ускорение
равно нулю при движении точки с постоянной
по модулю скоростью и в моменты времени,
в которые скорость
![]() достигает экстремальных значений.
достигает экстремальных значений.
Если
и
![]() одного знака, то модуль скорости
одного знака, то модуль скорости
![]() точки возрастает и движение в этом
случае называется ускоренным.
Если же
и
разных знаков, то модуль скорости
точки убывает и движение будет замедленным.
При
точки возрастает и движение в этом
случае называется ускоренным.
Если же
и
разных знаков, то модуль скорости
точки убывает и движение будет замедленным.
При
![]() модуль скорости остается постоянным –
движение равномерное.
модуль скорости остается постоянным –
движение равномерное.
Нормальное ускорение
равно нулю при прямолинейном движении
![]() ,
в точках перегиба криволинейной
траектории и в моменты времени, в которые
скорость точки обращается в нуль.
,
в точках перегиба криволинейной
траектории и в моменты времени, в которые
скорость точки обращается в нуль.
Отметим, что для вычисления касательного ускорения можно использовать равенство
![]() ,
,
так как
![]() .
.
Если движение точки задано координатным способом, то в случае задания движения в декартовых координатах ( , , ) будем иметь
![]() ;
;
для полярных координат получим
![]() .
.