

2.5 Геометрические условия для нелинейных ирисовых пружин сейсмоприёмников.
Жёсткость
на изгиб в боковом направлении (![]() )
в сотни раз превосходит жёсткость на
изгиб в осевом направлении (
)
в сотни раз превосходит жёсткость на
изгиб в осевом направлении (![]() )
у упругих элементов ирисовых пружин.
)
у упругих элементов ирисовых пружин.
Согласно математической модели ирисовой пружины, построенной в разделе 2.3 имеют место радиальные деформации оси (2.16). При приведении ирисовой пружины в плоское состояние осевое перемещение равно величине заневоливания (X=Xc). Величина радиальной деформации (рисунок 2.4) согласно (2.16) равна:
 (2.45)
(2.45)
Эксперимент,
выполненный на натурной ирисовой пружине
сейсмоприёмника СВ-5 ( υ
= 5 Гц ;
![]() = 1.78 ; R= 15.9 мм ; Xc
=
4.9мм ;
Ь = 1,25 мм ; h
= 0,13 мм) с отделением одного кольца
упругого элемента показал отличие
расчётного значения
= 1.78 ; R= 15.9 мм ; Xc
=
4.9мм ;
Ь = 1,25 мм ; h
= 0,13 мм) с отделением одного кольца
упругого элемента показал отличие
расчётного значения
![]() согласно (2.45) от действительного на 7 %.
согласно (2.45) от действительного на 7 %.
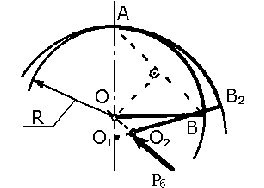
Рисунок 2.12 – Боковая сила, действующая в радиальном направлении на упругий элемент.
Эта радиальная деформация происходит под действием боковой силы Р (вид сверху на ирисовую пружину на рисунке 2.12), направленной вдоль линии ОО,
параллельной хорде упругого элемента AB . Интегрирование упругой линии определило значение Рк в следующем виде:
 (2.46)
(2.46)
Сила
![]() имеет наибольшее значение ( 2.46) в плоском
(рабочем) положении ирисовой пружины.
имеет наибольшее значение ( 2.46) в плоском
(рабочем) положении ирисовой пружины.
Определим ограничение в геометрии ирисовых пружин с нелинейной нагрузочной характеристикой, для стабильности их параметров необходимо выполнение условия отсутствия пластических деформаций при воздействии бокового и осевого усилии. В наиболее напряжённой точке, в месте перехода упругих элементов ирисовой пружины в опорные кольца будут действовать следующие внутренние силовые факторы: изгибающий момент от силы
 (2.47)
(2.47)
изгибающий
момент
 (2.48) крутящий
момент
(2.48) крутящий
момент
 (2.49)
(2.49)
Где согласно (2.8) и (2.9)
![]() (2.50)
(2.50)
Тогда изгибное напряжение равно
![]() (2.51)
(2.51)
Касательное напряжение
![]() (2.52)
(2.52)
где
![]() зависит от отношения
зависит от отношения
![]() и находится в пределах 0.28-0.32.
и находится в пределах 0.28-0.32.
Согласно критерию наибольших касательных напряжений интенсивность напряжений
![]() (2.53)
(2.53)
Из условия отсутствия пластических деформаций
![]() (2.54)
(2.54)
можно определить допустимые соотношения размеров ирисовой пружины.
Аналитические формулы (2.45)-(2.54) позволяют оценивать напряжённое состояние ирисовых пружин на стадии предварительного расчета сейсмоприёмников.
Уточняющий расчёт необходимо производить с использованием численного метода раздела 2.4.