

Автоматизация проектирования устройств управления положением платф
.pdfЗадача аппроксимации решается также в автоматизированном режиме посредством специального набора команд в командной стро-
ке MATLAB:
а) команда формирования файл-функции: function z = Da(Vv,da)
z = p00 + p10*Vv + p01*da + p20*Vv.^2 + p11*Vv.*da + p02*da.^2 + p30*Vv.^3 + p21*Vv.^2.*da + p12*Vv.*da.^2 + p03*da.^3;
б) команда запуска аппроксимации: ft = fittype( 'poly33' ); opts = fitoptions( ft ); opts.Weights = zeros(1,0);
[fitresult, gof]=fit( [Vv, da], Da, ft, opts).
Полученное уравнения регрессии зависимости αz = f(VВТЯГ; α)
для τгп = 0,1с:
αz (VВТЯГ; α) = 0,02542 – 0,5787∙ VВТЯГ + 0,5186∙ α + 16,91∙VВТЯГ |
2 – |
||||
– 12,8∙VВТЯГ ∙ α |
– 1,706∙ α |
2 –51,2∙ VВТЯГ3 + 74,63∙VВТЯГ2∙ α – |
|
||
|
– 51,77∙ VВТЯГ ∙ α |
2 + 27,07∙ α |
3. |
(4.8) |
|
Рис. 4.9. График регрессионной зависимости αz = f(VВТЯГ; α)
При этом R2 = 0,9206. На рис. 4.9 представлен график полученной регрессионной зависимости αz = f(VВТЯГ; α) для значения времени запаздывания гидропривода τгп= 0,1 с.
Полученное уравнения регрессии зависимости tпп = f(VВТЯГ; α)
для τгп = 0,1с:
100

tпп (VВТЯГ; α) = 8,281 – 5,783∙VВТЯГ – 99,28∙ α + 24,14∙VВТЯГ |
2 + |
|||||
+ 13,89∙VВТЯГ ∙ α |
+ 502,6∙ α |
2 – 60 ∙VВТЯГ3 + 62,86 ∙VВТЯГ |
2 ∙ α |
– (4.9) |
||
|
– 97,14 ∙VВТЯГ ∙ α |
2 – 853,3∙ α |
3. |
|
|
|
При этом R2 = 0,9993.
На рис. 4.10 представлен график полученной регрессионной зависимости tпп = f(VВТЯГ; α) для значения времени запаздывания гидропривода τгп = 0,1 с.
Рис. 4.10. График регрессионной зависимости tпп = f(VВТЯГ; α)
Алгоритм аппроксимации численных зависимостей αz, tпп от
VВТЯГ и α графически представлен в виде блок-схемы на рис. 4.11 и состоит из следующей последовательности действий:
а) чтение массивов входных (VВТЯГ; α) и выходных переменных
αz, tпп;
б) выбор вида уравнения регрессии, запись файл-функции (@ αz, @tпп) с уравнением регрессии в рабочую область MATLAB;
в) расчет коэффициентов уравнений регрессии и коэффициентов детерминации R2, запись их в рабочую область MATLAB;
г) проверка достоверности полученных уравнений по величине
R2.
Полученные уравнения регрессии позволили перейти к поиску оптимальных параметров.
Задачи оптимизации с точки зрения методов решения делятся на два класса [6]:
101

задачи безусловной оптимизации;
задачи условной оптимизации.
Начало αz_nm, tпп_nm, VВТЯГ_n, α_m
Ввод |
Формирование файл- |
уравнения |
функции, содержащей |
регрессии |
уравнение регрессии |
|
|
Расчет @ αz, @tпп коэффициентов
уравнения
регрессии
p00…pij, R2
Вывод p00…pij, R2
Останов
Рис. 4.11. Блок-схема алгоритма аппроксимации зависимостей αz = f(VВТЯГ; α) и tпп = f(VВТЯГ; α)
Задача безусловной оптимизации представляет собой поиск оптимума целевой функции без всяких дополнительных условий и ограничений [22]:
f(x) → min(max). |
(4.10) |
Задача условной оптимизации в общем виде записывается [22]
F f (xj ) → min(max); |
|
|
gi (xj ) ≤bi; |
|
|
|
(4.11) |
|
dj ≤xj ≤Dj; |
|
|
|
|
|
i1,...,m; j 1,...,n.
Всистему уравнений (4.11) входят три составляющие:
целевая функция F = f(xj) показывает, в каком смысле решение должно быть оптимальным, то есть наилучшим, при этом возможны
102
три вида назначения целевой функции: максимизация, минимизация, назначение заданного значения;
ограничения gi(xj)≤bi устанавливают зависимости между переменными;
граничные условия dj≤xj≤Dj показывают, в каких пределах могут находиться значения искомых переменных в оптимальном решении.
При решении задач оптимизации в настоящей работе целевая функция и граничные условия были представлены в следующем виде:
tпп = f(VВТЯГ; α) → min; |
|
αz ≤ αzзад; |
|
0,05 ≤ VВТЯГ ≤ 0,25 м/с; |
(4.12) |
0,05 ≤ α ≤ 0,25 ; |
|
Ri ≥ Rmin;
Lmin пред ≤ Li ≤ Lmax пред.
Для решения задачи условной оптимизации было решено воспользоваться методом множителей Лагранжа, который применим при наличии функциональных ограничений вида [22]
fj = fj (x1, x2,…, xn) = 0, |
(4.13) |
где j = 1, 2,…, m.
Для целевой функции Z (x1, x2,…, xn) справедливо уравнение [22]
dZ |
Z |
dx1 |
Z |
dx2 |
... |
Z |
dxn |
0; |
(4.14) |
|||
|
|
|
||||||||||
|
x |
x |
2 |
|
|
|
x |
n |
|
|
||
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
n |
Z |
|
|
|
|
|
|
|
|
|
dZ |
dxi 0. |
|
|
|
(4.15) |
|||||
|
|
|
|
|
|
|||||||
|
|
|
i 1 xi |
|
|
|
|
|
|
|||
Продифференцировав равенство (4.13), получим [22]
n |
f |
|
n |
f |
|
|
||
df1 |
1 |
dxi |
0; ............. |
dfm |
m |
dxi |
0. |
(4.16) |
x |
x |
|||||||
i 1 |
i |
|
i 1 |
i |
|
|
||
Каждое из полученных m уравнений теперь умножим на пока еще неизвестный параметр λ, называемый множителем Лагранжа [22]:
103
n |
f |
|
|
|
||||||
1df1 1 |
1 |
dxi |
0; |
|
|
|||||
x |
|
|||||||||
i 1 |
|
|
i |
|
|
|
||||
n |
|
f2 |
|
|
|
|
|
|||
2df2 2 |
dxi 0; |
|
(4.17) |
|||||||
|
|
|||||||||
i 1 |
|
x |
|
. |
||||||
|
|
|
i |
|
|
|
||||
....................................... |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
f |
|
|
|
||||
mdfm m |
m |
dxi 0. |
|
|||||||
x |
|
|||||||||
i 1 |
|
|
|
|
i |
|
|
|
||
Сложив уравнения (4.13) и уравнение (4.16), получим [22]
n |
Z |
|
f1 |
|
f2 |
|
fm |
|
|
|
|
|
|
... m |
|
0. |
(4.18) |
||||
x |
1 x |
2 x |
|
|||||||
|
x dxi |
|||||||||
i 1 |
i |
|
i |
|
i |
|
i |
|
|
|
Поскольку все параметры xi независимы, то для того, чтобы это уравнение удовлетворялось, достаточно, чтобы каждый из n членов равнялся нулю, получаем n уравнений [22]:
Z |
1 |
f1 |
2 |
f2 |
... m |
fm |
0. |
(4.19) |
|
x |
x |
x |
x |
||||||
|
|
|
|
|
|||||
i |
|
i |
|
i |
|
i |
|
|
Таким образом, для перехода к методу множителей Лагранжа необходимо преобразовать ограничения-неравенства в уравнения, после чего целевая функция приобретет вид [22]
F f (xj ) min(max); |
|
|
fi (xj ) 0; |
|
(4.20) |
|
||
i 1,...,m; j 1,...,n. |
|
|
|
|
|
При этом задача оптимизации становится безусловной и |
||
представляется в виде функции Лагранжа [22]: |
|
|
m |
|
|
L(xj; i ) f (xj ) i fi (xj ) min(max); |
(4.21) |
|
i 1 |
|
|
i 1,...,m; j 1,...,n.
Таким образом, была поставлена задача условной оптимизации при помощи задания целевой функции и граничных условий и осуществлен переход от нее к безусловной оптимизации.
104

Для решения задачи безусловной оптимизации был использован модифицированный метод Ньютона, основанный на пересчете матрицы Гессе формулой Бройзена-Флетчера-Гольдфарба-Шанно (алгоритм BFGS), реализованный в программном комплексе
MATLAB [22].
Стратегия данного метода состоит в построении последовательности точек {xk}, k = 0,1,…,n, таких, что f(xk+1) < f(xk). Точки последовательности вычисляются по правилу [22]
xk+1 = xk + βk∙sk, |
(4.22) |
где х0 задается пользователем, а направление спуска βk∙sk определяется для каждого значения k по формулам [22]:
k = min f xk sk ; |
|
(4.23) |
k 0 |
|
|
sk =-H(xk ) f (xk ); |
|
(4.24) |
1 |
(4.25) |
|
H(xk ) 2 f (xk ) |
, |
|
где H – матрица Гессе; f (xk ) – градиент функции f(x) в точке xk. Формула пересчета Бройзена-Флетчера-Гольдфарба-Шанно
(BFGS) [22]:
HBFGS(H, x,y) H |
x Hy2 x xT |
|
x Hy xT x x Hy T |
;(4.26) |
|
y x 2 |
y x |
||||
|
|
|
|||
|
x xk 1 xk ; |
(4.27) |
|||
|
y f xk 1 f xk . |
(4.28) |
|||
Построение последовательности {xk} заканчивается в точке xk при условии
xk 1 xk |
|
; |
|
|
|
|
|
|
|
|
(4.29) |
f (xk 1) f (xk |
) |
|
|||
, |
|
||||
|
|
|
|
|
|
где ε – заданное малое положительное число (точность приближения). Программный комплекс MATLAB позволяет проводить оптими-
зацию функциональных зависимостей вида z = f(x,y) вышеописанным методом при помощи встроенного пакета «Optimization Tool» (рис. 4.12), представляющего собой оконный интерфейс с возможностью
105
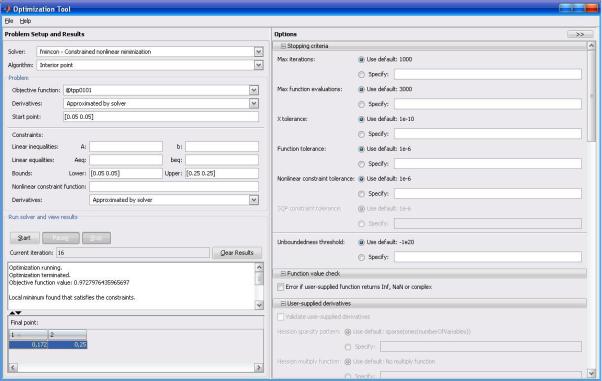
задания настроек оптимизации, оптимизируемой функции и граничных условий [4].
Задача оптимизации может решаться также в автоматизированном режиме посредством специального набора команд в командной строке MATLAB:
function [x,fval,exitflag,output,lambda,grad,hessian] = Opttpp(x0,lb,ub)
options=optimset;
options=optimset(options,'Display','off'); options=optimset(options,'Algorithm','interiorpoint'); fmincon(@tpp,x0,[],[],[],[],lb,ub,[],options);
Таким образом были получены оптимальные значения основных параметров устройства управления положением платформы строительной машины: VВТЯГ= 0,25 м/с; α = 0,172 .
Рис. 4.12. Внешний вид окна инструмента «Optimization Tool»
Алгоритм оптимизации параметров VВТЯГ и α по целевой функции критерия эффективности tпп графически представлен в виде блоксхемы на рис. 4.14 и состоит из следующей последовательности действий:
106

а)постановка задачи оптимизации: файл-функция (@tпп) с коэффициентами (p00…pij), ее оптимум, точка начала оптимизации (x0) и граничные условия (lb,ub);
б)нахождение интервала значений VВЫД, α для заданной точно-
сти αz (рис. 4.13);
в) переход от задачи условной к задаче безусловной оптимизации, используя метод множителей Лагранжа;
г)нахождение оптимума целевой функции и соответствующих ему переменных VВТЯГ и α;
д)запись найденных оптимальных значений αz, tпп, VВТЯГ, α в рабочую область MATLAB.
Рис. 4.13. График регрессионной зависимости αz = f(VВТЯГ; α) с наложенными ограничениями αzзад
Проведенный анализ, аппроксимация и оптимизация основных параметров устройства управления положением платформы строительной машины позволили составить алгоритм оптимизационного синтеза, графически представленный в виде блок-схемы на рис. 4.15.
Оптимизационный синтез состоит из следующей последовательности действий:
1.Постановка задачи оптимизации: выбор целевой функции: tпп=f(VВТЯГ; α) → min.
2.Аппроксимация численных зависимостей tпп и αz от VВТЯГ и α согласно алгоритму оптимизации (рис. 4.14): получение коэффициентов уравнения регрессии – полинома 3-й степени.
3.Решение задачи условной оптимизации параметров, используя методы множителей Лагранжа и Ньютона: расчет и запись в рабочую
область MATLAB оптимальных значений параметров αz, tпп, VВТЯГ и
107

α как результата решения задачи условной оптимизации целевой функции tпп = f(VВТЯГ; α) → min.
Начало |
@tпп, pij, x0, lb, ub |
Вводцелии условий оптимизации
Нахождениеинтервала значенийVВЫД, αдля заданнойточности αz
Переход от условной к безусловной оптимизации
Целевая функция (@tпп), ее оптимум, точка начала
оптимизации (x0), граничные условия (lb, ub)
@ αz, αzзад
Использование  метода множителей
метода множителей
Лагранжа
|
Безусловная |
|
|
|
оптимизация |
|
Оптимальные |
|
методом Ньютона |
|
αz, tпп, VВЫД, α |
|
Вывод |
|
|
|
αz, tпп, VВЫД, |
|
|
|
α |
|
|
|
Останов |
|
|
Рис. 4.14. Блок-схема алгоритма оптимизации основных параметров устройства управления положением платформы строительной машины
Результатом оптимизационного синтеза являются оптимальные значения скорости выдвижения аутригеров платформы строительной машины VВТЯГ и значение зоны нечувствительности порогового элемента α при определенном времени запаздывания гидропривода τгп.
108
5. СИСТЕМА АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ ОСНОВНЫХ ПАРАМЕТРОВ УСТРОЙСТВА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
В настоящей работе автоматизация проектирования устройства управления платформой строительной машины была сведена к автоматизации расчета оптимальных параметров: скорости перемещения аутригеров платформы VВЫД и ширины зоны нечувствительности порогового элемента α. На основе проведенных в работе теоретических исследований процесса управления положением платформы строительной машины была разработана инженерная методика оптимизации основных параметров устройства управления положением платформы строительной машины.
Инженерная методика заключается в следующем:
1.Для имеющейся математической модели процесса управления положением платформы строительной машины определить значения постоянных параметров:
а)по конструкторской документации на строительную машину определить параметры платформы: a, b;
б)по технической документации определить параметры гидропривода системы управления аутригерами платформы: dц, dш, c1,с2, с3,
mзол, гп;
в)исходя из требований, предъявляемых к строительной машине,
задать αzзад.
2.Определить диапазоны и шаги изменения оптимизируемых параметров устройства управления положением платформы строительной машины:
а) диапазон (VВТЯГ min, VВТЯГ max) и шаг ∆VВТЯГ изменения скорости выдвижения аутригеров платформы;
б) диапазон ( α min, α max) и шаг ∆ α изменения ширины зоны нечувствительности порогового элемента.
3.Провести исследования на ПЭВМ: решение математической модели процесса управления положением платформы строительной машины и получение массивов значений αz, tпп от оптимизируемых
параметров VВТЯГ и α.
4.Выполнить аппроксимацию полученных численных зависимостей αz, tпп от VВТЯГ и α методом наименьших квадратов.
5.Найти интервалы допустимых значений VВТЯГ и α для заданной точности αzзад.
109