

Основные понятия и задачи теории управления.
Автоматическое регулирование это поддержание постоянной заданной величины, характеризующей состояние объекта управления или изменение этой величины по определенному заданному закону регулирования. При этом это поддержание осуществляется путем измерения управляемых величин объекта управления и выработкой управляющего воздействия на данный объект.
Автоматическое управление это автоматическое выполнение ряда функций, обеспечивающих оптимальное функционирование системы с возможностью выбора из различных вариантов функционирования. При этом данные функции выполняются по алгоритмам, достигающим цель управления.
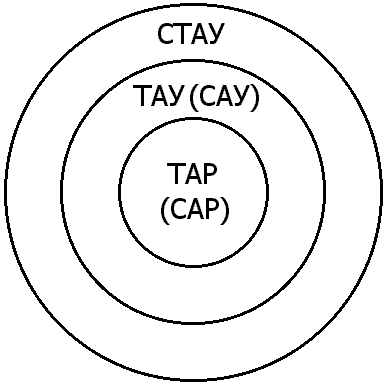
САР – система автоматического регулирования;
ТАР – теория автоматического регулирования;
САУ – система автоматического управления;
ТАУ – теория автоматического управления.
Ц.и З.:изучение задач и принципы и методология постановления систем,закономерностей,протекающих в них процессов,основ синтеза СУ современными тех.системами.Знать основы мат.моделирования динам. систем,методы и алгоритм анализа/синтеза САУ.Инженерные методики анализа соврм.САУ.Средства и алгоритм автомотического моделирования и проектирования.
УУ, ОУ-объект упр., УИ-уст. измерен, ММ-мат.модель, ОДУ-об.диф.ур, ПФ-перед.функ. СУ-сист.упр. САУ, ОС
Классификация технических САУ.
По степени автоматизации функций упр: ручного упр, автоматизированного упр, автоматического упр.
По характеру процессов происходящих в САУ: непрерывные(аналоговые), дискретные (релейные, импульсные, цифровые), дискретно непрерывные.
По характеру нелинейности: линейные, нелинейные, линейнодеференцируемые
По режимам управления: стабилизация выходной координаты y=cos t, программного управления y=f(t), следящие системы y=f(?).
По типу обратной связи: разомкнуто (без обратной связи), с ОС по состоянию объекта, с ОС по возмущению внешней среды , с комбинированной ОС.
Основные функциональные элементы, блоки, структуры системы управления.
К функц. элементам относятся:
Чувст.элем. (датчики), усил.элм.(для усил. сиг.датчиков), преобразовательные (ЦАП, АЦП), исполнительные элем. (электро, гидравлические), корректирующие элем. (регуляторы, фильтры, корректирующие звенья.), задающие элем.(ист. эталонного напряжения, потенциометры).
Функ.блоки: блок текущей информации(к ним поступает информация от датчиков), блок памяти (хранится инф. о поступающая от задающих, чувствительных, усилительных элем.), блок управления (процессорные блоки, которые осуществляют преобразование инф. и обработку), бллоки УСО (устройства связи с обьектом).
Функ.структур: локальные нижн.ур. или одноуровневые, централизованные (двухуровневые) . децентрализованные (одна ведущая вторая ведомая), иерархические (3х,4х,5уровн.)
Модели динамических управляемых объектов.
Большинство
тех.обьектов является динамическими
т.е. содержат различные инерциальные
элементы и описываются диф ур. N-ного
порядка. Наиболее часто для описания
сау применяют частотные методы
![]() X,Y – гармонический сигнал Х=Хm*sinWt
Xm-амплитудное значение,W-круговая
частота. Частотные характеристики
делятся на АЧХ(ЛАЧХ), ФЧХ
X,Y – гармонический сигнал Х=Хm*sinWt
Xm-амплитудное значение,W-круговая
частота. Частотные характеристики
делятся на АЧХ(ЛАЧХ), ФЧХ
На основе этих характеристик строятся диаграммы, которые позволяют судить об устойчивости системы.
Временные методы исследования СУ: ОДУ, векторно-математич. Ур-е X=AX+BY+C, операторная форма (1передаточная функция W(p)-непрерывная D(z)-дискретная, 2 передаточная матрица), схем пространства-состояний.
Статические и динамические характеристики САУ.
Статический
режим характеризуется устоявшимся
состоянием при неизменных входных
воздействиях. Уравнение состояния можно
получить из уравнения динамических
путем приравнение к 0 всех производных
координат во времени.
![]() -аргумент преобразования по Лапласу
-аргумент преобразования по Лапласу
Дин.процесс
характеризируется производными
состояниям системы, либо при ее нулевых
начальных условиях либо при изменении
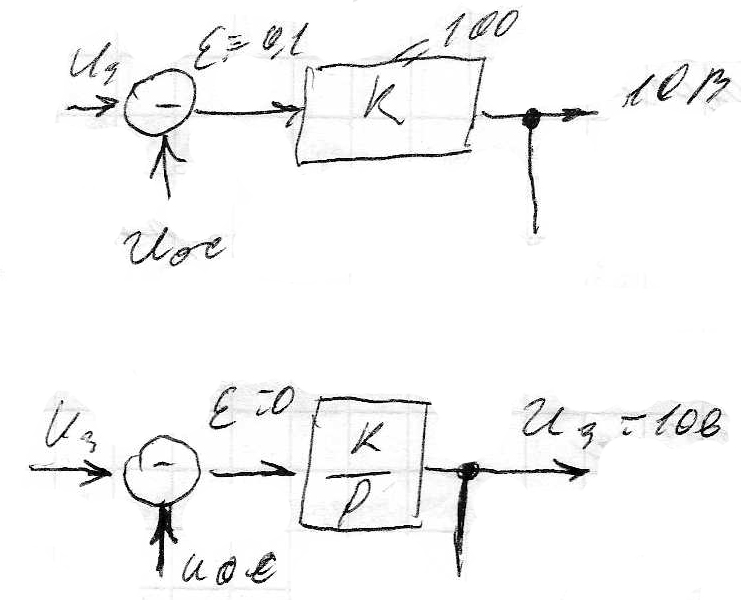
входных воздействий . Статический режм
в СУ с ОС характеризуется величиной
статической ошибки перерегулирования
. В системах с пропорциональным
регулированием ошибка называется
статической. В системах интегральным
регулированием статическая ошибка
отсутствует система называется
астатической.
Переходные и импульсные характеристики СУ.
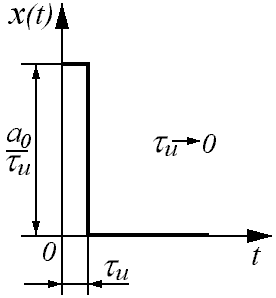
Импульсное воздействие представляет собой одиночный импульс прямоугольной формы (см. рис.), имеющий достаточно большую высоту и весьма малую продолжительность (по сравнению с инерционностью испытываемой системы). Очевидно, что площадь такого импульса всегда равна а0.
![]() причем
причем
![]()
Согласно этим выражениям, дельта – функцию можно рассматривать как импульс, имеющий бесконечно большую высоту, бесконечно малую длительность и единичную площадь. Дельта – функцию можно определить также как производную единичного скачка:
![]() .
.
Временные характеристики САУ
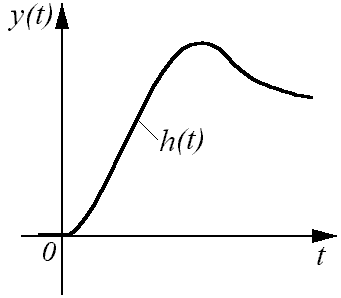
Наиболее наглядное представление о динамических свойствах элемента дает его переходная функция (характеристика). Переходной функцией h(t) называют изменение выходной величины y(t) во времени, возникающее после подачи на вход единичного ступенчатого воздействия, при нулевых начальных условиях.
![]()
Импульсной переходной функцией (t) называют изменение выходной величины y(t), возникающее после подачи на вход дельта – функции, при нулевых начальных условиях (см. рис.).
И
![]() ,
,
и наоборот, переходная функция равна интегралу от импульсной переходной:
![]()
Переходные характеристики h(t) и (t) называют также временными.
7. Преобразование Лапласа. Передаточные функции и матрицы.
8. Способы получения передаточных функций.
Передаточной функцией W(p) называют отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях.
![]()
Допустим динамика описывается дифференциальным управлением:
![]() Применим
к данному уравнению прямое преобразование
Лапласа:
Применим
к данному уравнению прямое преобразование
Лапласа:

С![]() труктурная
схема звена САУ:
труктурная
схема звена САУ:
Таблица типовых звеньев. Масштабирующее, идеально-дифференцирующее, идеально-интегрирующее, реальное дифференцирующее, реальное интегрирующее, апериодическое 1-го и 2-го порядка, изодромное, колебательное).
Типовые звенья характеризуются одно направленностью (один вход и один выход) и отражает ДУ 1вого порядка в этом звене.
Способы соединения звеньев. Правила преобразования структурных схем. Таблицы структурных преобразований звеньев (перестановка, последовательное и параллельное, встречно-параллельное соединения звеньев).
Способы соединения звеньев. Таблицы структурных преобразований звеньев (перенос линии связи до и после звена, перенос сумматора до и за звено).
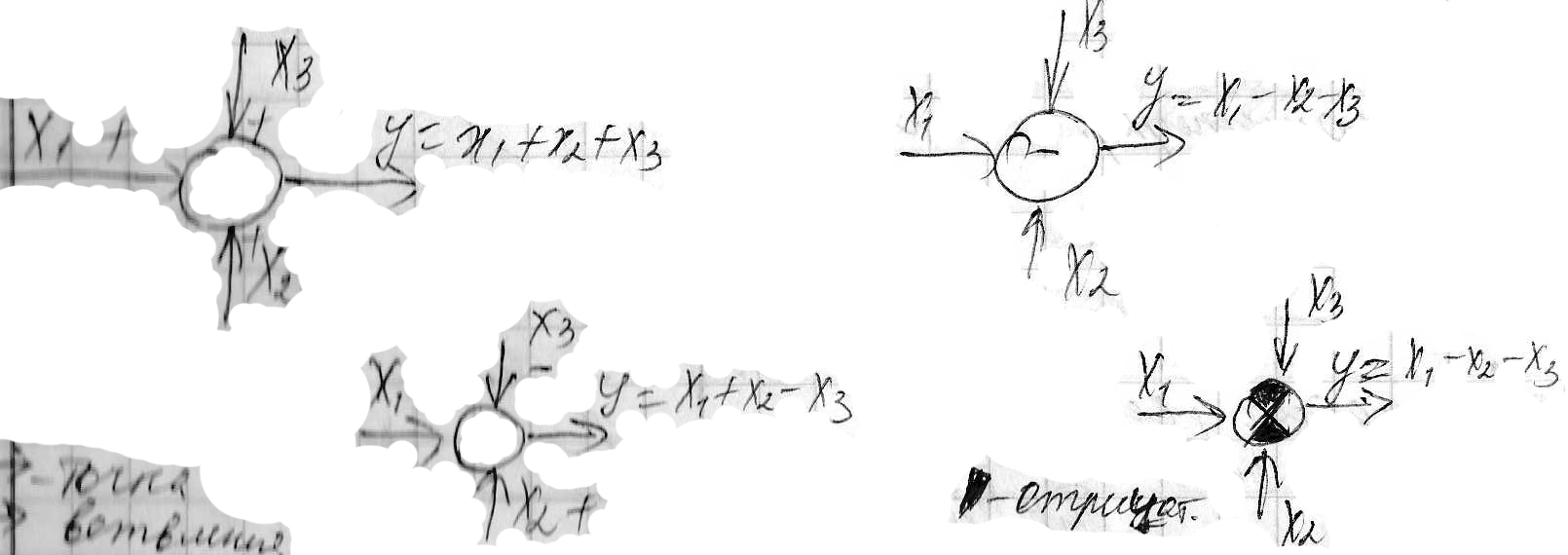
Последовательное, параллельное, встречно параллельное. Звенья объединяются в структурную схему с помощью сумматоров, линий связи и точек ветвления. Сумматоры – те же звенья но на схемах означают суммирование или вычитание.
12.Типовые динамические звенья и структурные схемы сау.
Частотные передаточные функции.
амплитудная частотная характеристика (АЧХ);фазовая частотная характеристика (ФЧХ);амплитудно-фазовая частотная характеристика (АФЧХ).
При
исследовании систем используют
амплитудно-фазовые характеристики
W(jw)=W(p) p=jw –комплексный коэффициент
передачи, p - коэффициент преобразования
Лапласа. 1 АЧХ 2 ФЧХ 3 ЛАЧХ Амплитудная
частотная характеристика (АЧХ) –
зависимость отношения амплитуд выходного
и входного сигналов от частоты![]()
![]()


Фазовая
частотная характеристика ФЧХ –
зависимость фазового сдвига между
входным и выходным сигналами от
частоты.ФЧХ показывает, какое отставание
или опережение выходного сигнала по
фазе создает элемент при различных
частотах.
![]()
Амплитудную и фазовую характеристики можно объединить в одну общую – амплитудно-фазовую частотную характеристику (АФЧХ). АФЧХ представляет собой функцию комплексного переменного j :W(j) = A( ) e j () (показательная форма), (2.35)где A( ) – модуль функции; () – аргумент функции. L(w)=20lgA(w)
A(w) 0.01 0.1 1 10 100 1000 L(w) -40 -20 0 20 40 60
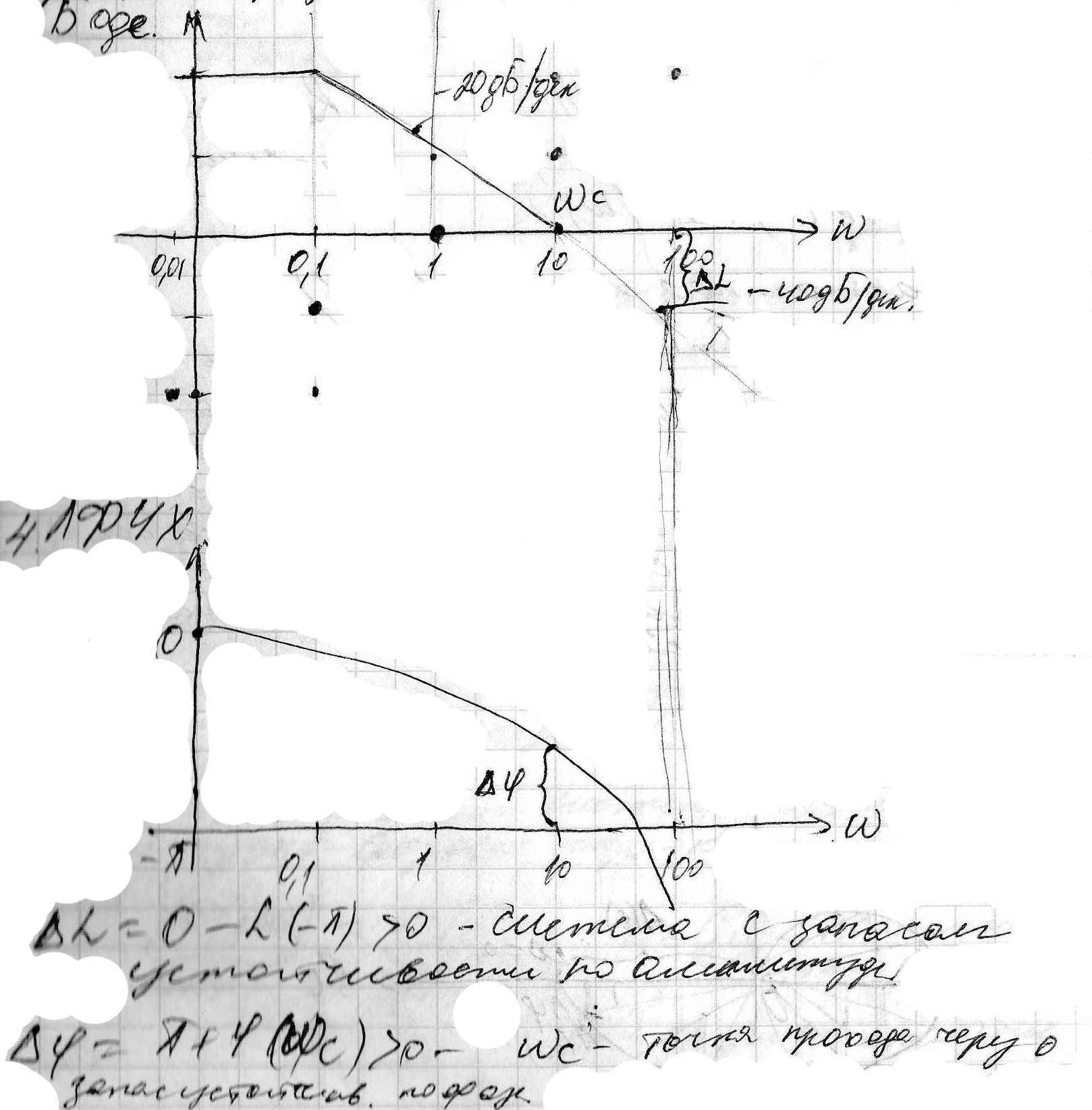
Частотные характеристики САУ и диаграмма Боде.
15. Устойчивость систем управления.
Устойчивость автоматической системы – это свойство системы возвра-щаться в исходное состояние равновесия после прекращения воздействия, выведшего систему из этого состояния. Неустойчивая система не возвращается в исходное со-стояние, а непрерывно удаляется от него.
Для
устойчивости СУ исследуют ее
характеристическое ур-е. характеристическое
ур-е.в передаточной функции значения
системы приравнивают к 0

Решением являются корни ур-е (полюса) P=? i=1,2,3…n для того чтобы система была уступчивая необходимо чтобы все корни характеристического ур-е. имели отрицательные действительная часть.
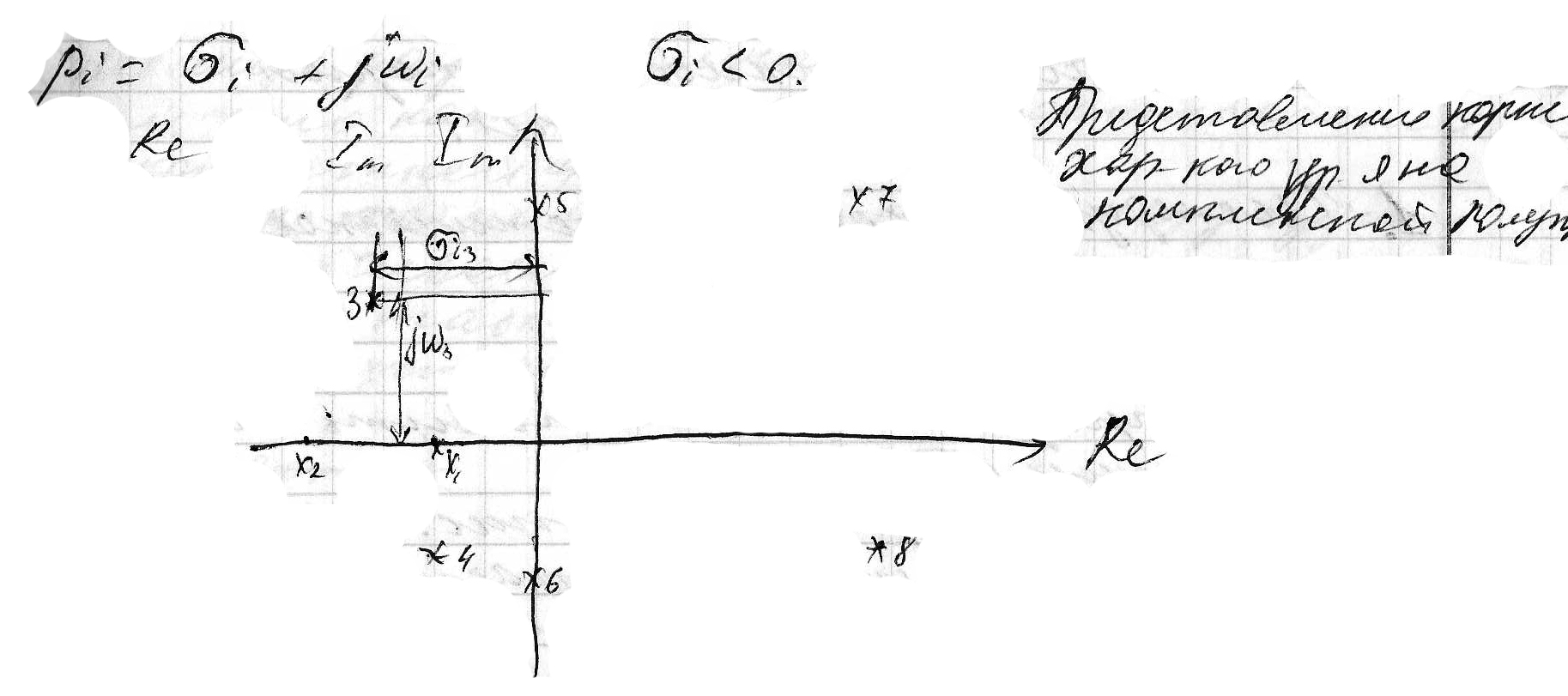
Если корни в системе тока 1 и 2 те. Корни в левой части система – устойчива 3 и 4 – система устойчива имеет колебательную характеристику. 5и6 – на границе устойчивости. Если корни в правой части – система неустойчива
Алгебраический критерий устойчивости Гурвица.
![]()
L(s) и M(s) – полиномы степени m и n, причем m<n.
![]()
Хар.
полином:
![]()
Для того чтобы исследовать устойчивость замкнутой системы нужно составить матрицу G размера nxn из коэф-тов хар. полинома по правилу:
1. По главной диагонали выписываем коэф-ты хар. полинома, начиная с a1 до an.
2. Каждый столбец матрицы G вверх от диагонального элемента заполняется по возрастающим индексам.
3. Каждый столбец ниже диагонального элемента заполняется коэф-тами по убывающим индексам.
4. Все эл-ты матрицы G выше an и ниже a0 заполняются нулями.

После составления матрицы Гурвица по ней можно судить об устойчивости замкнутой САУ.
Обозначим через Δ1,…, Δn диагональные миноры матрицы G.
Для того чтобы замкнутая САУ была устойчива, необходимо и достаточно чтобы Δ1 > 0, Δ2 > 0,…, Δn = det(G) > 0.
С помощью критерия Гурвица можно найти область изменения значений параметров системы, при которых она будет обладать св-вом устойчивости. Для этого: Δn = det(G) = 0. В результате получим уравнения границ устойчивости: an = 0, Δn-1 =0. Первое уравнение соответствует наличию у хар. полинома ЗСАУ нулевого корня λ=0. 2ое Ур-е соответствует наличию у хар. полинома системы пары чисто мнимых корней λ = ±jω.
Эти ур-я разбивают пр-во параметров ЗСАУ на области, в кот. все остальные Δk > 0 соответствуют значениям коэф-тов хар. полинома, при кот. ЗСАУ будет асимптотически устойчива. Вне этих областей значений параметров, система неустойчива.
Алгебраический критерий устойчивости Рауса.

L(s) и M(s) – полиномы степени m и n, причем m<n.
Хар. полином:
Правило составления таблиц:
1.
В первую строку таблицы заносят коэф-ты
хар. полинома с четными номерами в
порядке возрастания индексов:
![]()
2.
Во вторую строку заносят коэф-ты хар.
полинома с нечетными номерами в порядке
возрастания индексов:
![]()
3. Остальные элементы заполняются по рекуррентной формуле:
![]()
Следует отметить, что первый индекс у коэф-тов означает номер столбца, а второй – строки.
После того, как таблица заполнена, можно судить об устойчивости замкнутой системы. В дальнейшем будем считать, что необходимые условия устойчивости выполнены, т.е. все коэф-та хар. полинома строго положительны.
Для того чтобы замкнутая САУ было устойчивой, необходимо и достаточно, чтобы коэф-ты первого столбца таблицы Рауса были положительны.
Если не все коэф-ты 1го столбца положительны, то сис-ма неуст., а число правых корней хар. полинома равно силу перемен знака в первом столбце таблицы Рауса.
Алгоритм управления (регулирования) в АСУ устанавливает связь ошибки (p) и управляющего воздействия Y(p),
Эта связь в типовой одноконтурной АСУ (рис. 4.7) определяется передаточной функцией регулятора
![]() (4.14)
(4.14)
В линейных АСУ применяются следующие типовые алгоритмы управления (регулирования):
пропорциональный (П) алгоритм;
интегральный (И) алгоритм;
пропорционально-интегральный (ПИ) алгоритм;
пропорционально-дифференциальный (ПД) алгоритм;
пропорционально-дифференциально-интегральный (ПИД) алгоритм;