

Контрольная работа Вариант 02
22. Приоритеты и концепции планирования потоков в Windows 2000, ос Unix System V и os/2.
ОС Windows 2000
Одной из важных концепций, лежащих в основе многих вытесняющих алгоритмов планирования, является приоритетное обслуживание. Приоритетное обслуживание предполагает наличие у потоков некоторой изначально известной характеристики — приоритета, на основании которой определяется порядок их выполнения.
Приоритет — это число, характеризующее степень привилегированности потока при использовании ресурсов вычислительной машины, в частности процессорного времени: чем выше приоритет, тем выше привилегии, тем меньше времени будет проводить поток в очередях.
В большинстве операционных систем, поддерживающих потоки, приоритет потока непосредственно связан с приоритетом процесса, в рамках которого выполняется данный поток. Приоритет процесса назначается операционной системой при его создании. Значение приоритета включается в описатель процесса и используется при назначении приоритета потокам этого процесса. Во многих ОС предусматривается возможность изменения приоритетов в течение жизни потока. Изменение приоритета могут происходить по инициативе самого потока, когда он обращается с соответствующим вызовом к операционной системе, или по инициативе пользователя, когда он выполняет соответствующую команду. ОС сама может изменять приоритеты потоков в зависимости от ситуации, складывающейся в системе. В последнем случае приоритеты называются динамическими в отличие от неизменяемых, фиксированных, приоритетов.
От того, какие приоритеты назначены потокам, существенно зависит эффективность работы всей вычислительной системы.
Рассмотрим схему назначения приоритетов потокам, принятую в операционной системе Windows2000 (рисунок 1). В системе определено 32 уровня приоритетов и два класса потоков — потоки реального времени и потоки с переменными приоритетами. Диапазон от 1 до 15 включительно отведен для потоков с переменными приоритетами, а от 16 до 31 — для более критичных ко времени потоков реального времени (приоритет 0 зарезервирован для системных целей).
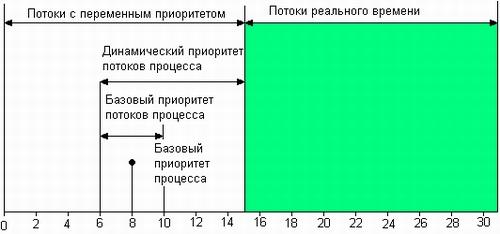
Рисунок 1. Схема назначения приоритетов в Windows2000
При создании процесса он в зависимости от класса получает по умолчанию базовый приоритет в верхней или нижней части диапазона. Базовый приоритет процесса в дальнейшем может быть повышен или понижен операционной системой. Первоначально Поток получает значение базового приоритета из диапазона базового приоритета процесса, в котором он был создан. Пусть, например, значение базового приоритета некоторого процесса равно К. Тогда все потоки данного процесса получат базовые приоритеты из диапазона [К-2, К+2]. Отсюда видно, что, изменяя базовый приоритет процесса, ОС может влиять на базовые приоритеты его потоков.
В Windows2000 с течением времени приоритет потока, относящегося к классу потоков с переменными приоритетами, может отклоняться от базового приоритета потока, причем эти изменения могут быть не связаны с изменениями базового приоритета процесса. ОС может повышать приоритет потока (который в этом случае называется динамическим) в тех случаях, когда поток не полностью использовал отведенный ему квант, или понижать приоритет, если квант был использован полностью. ОС наращивает приоритет дифференцирование в зависимости от того, какого типа событие не дало потоку полностью использовать квант.
Существуют две разновидности приоритетного планирования: обслуживание с относительными приоритетами и обслуживание с абсолютными приоритетами.
В обоих случаях выбор потока на выполнение из очереди готовых осуществляется одинаково: выбирается поток, имеющий наивысший приоритет. Проблема определения момента смены активного потока решается по-разному. В системах с относительными приоритетами активный поток выполняется до тех пор, пока он сам не покинет процессор, перейдя в состояние ожидания (или же произойдет ошибка, или поток завершится).
В системах с абсолютными приоритетами выполнение активного потока прерывается кроме указанных выше причин, еще при одном условии: если в очереди готовых потоков появился поток, приоритет которого выше приоритета активного потока. В этом случае прерванный поток переходит в состояние готовности.
В системах, в которых планирование осуществляется на основе относительных приоритетов, минимизируются затраты на переключения процессора с одной работы на другую. С другой стороны, здесь могут возникать ситуации, когда одна задача занимает процессор долгое время. Для систем разделения времени и реального времени такая дисциплина обслуживания не подходит: интерактивное приложение может ждать своей очереди часами, пока вычислительной задаче не потребуется ввод-вывод.
ОС Unix System V
В системе Unix System V Release 4 реализована вытесняющая многозадачность, основанная на использовании приоритетов и квантования.
Все процессы разбиты на несколько групп, называемых классами приоритетов. Каждая группа имеет свои характеристики планирования процессов.
Созданный процесс наследует характеристики планирования процесса-родителя, которые включают класс приоритета и величину приоритета в этом классе. Процесс остается в данном классе до тех пор, пока не будет выполнен системный вызов, изменяющий его класс.
В Unix System V Release 4 возможно включение новых классов приоритетов при инсталляции системы. В настоящее время имеется три приоритетных класса: класс реального времени, класс системных процессов и класс процессов разделения времени. В отличие от ранних версий Unix приоритетность (привилегии) процесса тем выше, чем больше число, выражающее приоритет. На рисунке 2 показаны диапазоны изменения приоритетов для разных классов. Значения приоритетов определяются для разных классов по-разному.
Процессы системного класса используют стратегию фиксированных приоритетов. Системный класс зарезервирован для процессов ядра. Уровень приоритета процессу назначается ядром и никогда не изменяется. Заметим, что пользовательский процесс, перешедший в системную фазу, не переходит при этом в системный класс приоритетов.
Процессы реального времени также используют стратегию фиксированных приоритетов, но пользователь может их изменять. Так как при наличии готовых к выполнению процессов реального времени другие процессы не рассматриваются, то процессы реального времени надо тщательно проектировать, чтобы они не захватывали процессор на слишком долгое время. Характеристики планирования процессов реального времени включают две величины: уровень глобального приоритета и квант времени. Для каждого уровня приоритета имеется по умолчанию своя величина кванта времени. Процессу разрешается захватывать процессор на указанный квант времени, а по его истечении планировщик снимает процесс с выполнения.
|
Приоритетный класс |
Выбор планировщика |
Глобальное значение приоритета |
|
Реальное время (real time) |
первый . . . . |
159 . . . 100 |
|
Системные процессы (system) |
. . . . . . . . |
99 . . . . . . 60 |
|
Процессы разделения времени (time-shared) |
. . . . . . . последний |
59 . . . . . . 0 |
|
Возможно добавление новых классов |
| |
Рисунок 2. Приоритетные классы процессов
Процессы разделения времени были до появления UNIX System V Release 4 единственным классом процессов, и по умолчанию UNIX System V Release 4 назначает новому процессу этот класс. Состав класса процессов разделения времени наиболее неопределенный и часто меняющийся, в отличие от системных процессов и процессов реального времени. Для справедливого распределения времени процессора между процессами, в этом классе используется стратегия динамических приоритетов, которая адаптируется к операционным характеристикам процесса.
Величина приоритета, назначаемого процессам разделения времени, вычисляется пропорционально значениям двух составляющих: пользовательской части и системной части. Пользовательская часть приоритета может быть изменена суперпользователем и владельцем процесса, но в последнем случае только в сторону его снижения.
Системная составляющая позволяет планировщику управлять процессами в зависимости от того, как долго они используют процессор, не уходя в состояние ожидания. Тем процессам, которые потребляют большие периоды времени без ухода в состояние ожидания, приоритет снижается. Таким образом, процессам дается низкий приоритет, что означает, что они реже выбираются на выполнение. А тем процессам, которые часто уходят в состояние ожидания после короткого периода использования процессора, приоритет повышается. Но процессам с низким приоритетом даются большие кванты времени, чем процессам с высокими приоритетами. Таким образом, хотя низкоприоритетный процесс и не работает так часто, как высокоприоритетный, но зато, когда он наконец выбирается на выполнение, ему отводится больше времени.
Планировщик использует следующие характеристики для процессов разделения времени:
|
ts_globpri |
содержит величину глобального приоритета; |
|
ts_quantum |
определяет количество тиков системных часов, которые отводятся процессу до его вытеснения; |
|
ts_tqexp |
системная часть приоритета, назначаемая процессу при истечении его кванта времени; |
|
ts_slpret |
системная составляющая приоритета, назначаемая процессу после выхода его из состояния ожидания; ожидающим процессам дается высокий приоритет, так что они быстро получают доступ к процессору после освобождения ресурса; |
|
ts_maxwaite |
максимальное число секунд, которое разрешается потреблять процессу; если этот квант времени истекает до кванта ts_quantum, то, следовательно, считается, что процесс ведет себя по-джентльменски, и ему назначается более высокий приоритет; |
|
ts_lwait |
величина системной части приоритета, назначаемая процессу, если истекает ts_maxwait секунд. |
Для процессов разделения времени в дескрипторе процесса proc имеется указатель на структуру, специфическую для данного класса процесса. Эта структура состоит из полей, используемых для вычисления глобального приоритета:
|
ts_timeleft |
число тиков, остающихся в кванте процесса; |
|
ts_cpupri |
системная часть приоритета процесса; |
|
ts_uprilim, ts_upri |
верхний предел и текущее значение пользовательской части приоритета. Эти две переменные могут модифицироваться пользователем; |
|
ts_nice |
используется для обратной совместимости с системным вызовом nice. Она содержит текущее значение величины nice, которая влияет на результирующую величину приоритета. Чем выше эта величина, тем меньше приоритет. |
В версии SVR4 нет поддержки многонитевой (multithreading) организации процессов на уровне ядра, хотя и есть два системных вызова для организации нитей в пользовательском режиме. Во многих коммерческих реализациях Unix, базирующихся на кодах SVR4, в ядро включена поддержка нитей за счет собственной модификации исходных текстов SVR4.
OS/2
Планирование в ОС OS/2 основано на использовании квантования и абсолютных динамических приоритетов. Определены четыре приоритетных класса: критический, серверный, стандартный и остаточный, в каждом из которых имеется 32 приоритетных уровня.
Потоки критического класса имеют наивысший приоритет. К этому классу относятся системные потоки и потоки ядра.
Серверный класс используется для обслуживания потоков, работающих с серверными приложениями.
Потоки пользователя относятся к стандартному классу.
Потоки, входящие в остаточный класс имеют самый низкий приоритет.
Потоки, имеющий одинаковый приоритет обслуживаются в циклическом порядке. Приоритеты могут изменяться планировщиком в следующих случаях:
1) если поток находится в ожидании процессорного времени дольше, чем это задано системной переменной MAXWAIT, то его уровень приоритета будет автоматически увеличен системой, при этом результирующее значение приоритета не должно превышать нижней границы диапазона приоритетов критического класса.
2) если поток ушел на выполнение операции ввода/вывода, то после ее завершения он получит наивысшее значение приоритета своего класса.
3) приоритет потока автоматически повысится, когда он поступит на выполнение.
ОС динамически устанавливает величину кванта времени, отводимого потоку для выполнения. Величина кванта зависит от загрузки системы и интенсивности подкачки. Параметры настройки системы позволяют явно задать границы изменения кванта от 32 до 65536 мс. Если поток был прерван до истечения кванта времени, то следующий выданный ему интервал выполнения будет увеличен на время, равное одному периоду таймера, и так до тех пор, пока квант не достигнет заданного при настройке системы предела.