

Расчет:
Определение недостающих геометрических размеров исполнительного механизма:
Вб=В+(50…100)=500 +(50…100)=550…600
где В-ширина ленты, мм
Номинальный момент на валу Исполнительного механизма:
Т=
![]() = 1,8*
= 1,8*![]() = 0.28кНм
= 0.28кНм
Расчет эквивалентного вращения момента:
![]() =0.28*
=0.28*![]() = 0.1943кНм
= 0.1943кНм
Угловая скорость вращения вала исполнительного механизма:
ω
= ![]() =
= ![]() =8,254
=8,254 
Расчет КПД привода. Согласно кинематической системе.
![]() = 0.98 *0,98 *
= 0.98 *0,98 * ![]()
Расчетная мощность электродвигателя
![]() =
= ![]() = 1,812кВт
= 1,812кВт
Частота вращения вала исполнительного механизма:
![]()
Возможный диапазон общего передаточного отношения кинематической схемы привода. Табл.5 ( твердость зубьев HRC<56)
![]()
![]()
Возможный диапазон асинхронной частоты вращения вала электродвигателя:
![]()
![]()
В соответствии с расчетной мощностью и полученным диапазоном скоростей выбираем два электродвигателя:
100L6
![]() = 2,2 кВт
= 2,2 кВт ![]() =
950
=
950![]()
112МА8
![]() = 2,2 кВт
= 2,2 кВт ![]() = 700
= 700
Для данного примера в этом случае подходят все двигатели c мощностью 2,2 кВт. Определяем общее передаточное отношение для двух вариантов электродвигателей:
![]() =
= ![]() =12,05
=12,05

Определяем общее передаточное число редуктора. Принимаем по табл.5 передаточное отношение цепной передачи(U) равной 2, тогда передаточное отношение редуктора:


Посчитанные передаточные отношения для редуктора необходимого округлить до стандартных из табл.5:
![]() =2
=2
![]() =4,5
=4,5
![]()
Проверяем точность разбивки передаточных отношений:

Таким образом, условие выполняется. Окончательно принимаем электродвигатель 112МА8 исполнение М112.
![]()
 ,
,
![]() ,
,
![]()
Производим проверку выбранного электродвигателя на перегрузку
![]()
![]() =
1.5Т = 1.5*0,28 = 0.42
кНм
=
1.5Т = 1.5*0,28 = 0.42
кНм
![]()
![]()
![]()
![]() =2,1
=2,1
Т.к.
![]() =2,2
кВт, то условие выполняется, т.е. двигатель
не будет перегружен.
=2,2
кВт, то условие выполняется, т.е. двигатель
не будет перегружен.
Вычерчиваем эскиз электродвигателя с указанием его основных характеристик

D22 |
D24 |
D20 |
H31 |
H10 |
H1 |
H |
L21 |
L10 |
L20 |
L30 |
B10 |
B1 |
15 |
300 |
265 |
310 |
12 |
8 |
112 |
16 |
140 |
4 |
452 |
190 |
10 |
Составление таблицы исходных данных.
При расчете мощности на каждом валу учитываются потери (КПД) на участке кинематической цепи от электродвигателя до рассматриваемого вала (если считается P1) и от предыдущего вала до рассматриваемого вала (если считается Р2, Р3 ... и т.д.). Кроме того, при расчете P1 за мощность электродвигателя принимается номинальная расчетная (РРН), полученная по формуле
Ррн
=![]() =
= 
№ валов |
ni, об/мин |
Рi, кВт/ч |
Тi, Нм |
1 |
n 1 =n таб=700 |
Р1=Ррн *nпп =2.61*0,99=2.58 |
|
2 |
n 2= n1/Uрем=700/2=350 |
Р2=Р1*nрм*nпп = 2.58*0,96*0,99=2.45 |
|
3 |
n 3= n2/Uт=350/4,5=77,7 |
P3= Р2*nцп* nм * (nпп)*(nпп)= =2.45*0,98*0,98*0.99* 0.99=2.3 |
|
Проверка:
n 3 = 77.7об/мин nим = 78,86 об/мин
Т3 = 282,6Нм Т = 280 Нм
Расхождения в скоростях и моментах 1%, что допустимо (предел 5 %).
Составление схемы, определение опорных точек и предварительных размеров.
К онструирование
приводного вала конвейера начинаем с
составления его схемы, на который
необходимо показать характерные точки
(рис.1).
онструирование
приводного вала конвейера начинаем с
составления его схемы, на который
необходимо показать характерные точки
(рис.1).
Рис.1. Схема приводного вала ленточного конвейера с барабаном.
На схеме показаны следующие характерные точки:
1– середина конца вала;
2– середина подшипника левой опоры;
3 и 4 – середина ступиц барабана;
5 – середина подшипника правой опоры.
Величина размеров l1, l2 и l4,обычно зависит от диаметра вала. При предварительном конструировании рекомендуется применять:
l1 ≈ (1,5 …. 1,8) dп =(1,5…1,8)*50= 75…90
где dп – диаметр вала под подшипником в точках 2 и 5 (определение его величины см. ниже);
Для привода вала с барабаном (ленточного конвейера) можно предварительно принять l2 = l4 ≈ l1 + Вб/ 4 = 79+550/4…91,2+550/4=216,5…228,7
где Вб – ширина барабана, тогда Вб=В+50=500+50=550
l3 = Вб/2=550/2=275
Определение диаметра вала на отдельных участках
![]()
где Ткр – крутящий момент на проектируемом валу (Н м), который определяется в предварительном расчете привода.

Из полученного интервала размеров dк выбираем стандартный размер:
d к
=36, тогда L1
=80, r=2,
c=1,6
к
=36, тогда L1
=80, r=2,
c=1,6
Для передачи крутящего момента с полумуфты на приводной вал, а также с вала на барабан или звездочки, рекомендуется использовать призматические шпонки, так как соединения с такими шпонками обеспечивают передачу наибольшего крутящего момента. После определения размеров конца вала для принятого dк определяют размеры шпоночного соединения по ГОСТ 23360 – 78 (для валов с d>30)
Размеры шпонки: 10 Х 8 Х 80 ГОСТ 23360 – 78
b=10, h=8, t=5, t1=3,3
Длина шпонки берется меньше длины вала на 5-10мм: lшп =70мм
Определение диаметра вала под подшипник. Выбор подшипника.
П осле
определения диаметра конца вала и
размеров шпонки необходимо определить
диаметр вала в точке 2 под подшипником.
Он определяется из того условия, что на
конце вала находится призматическая
шпонка, которая устанавливается на валу
по посадке с натягом и после установки
не должна удаляться. При сборке и
разборке узла, подшипник должен свободно
одеваться и сниматься через шпонку, то
есть должно выполняться следующее
условие
осле
определения диаметра конца вала и
размеров шпонки необходимо определить
диаметр вала в точке 2 под подшипником.
Он определяется из того условия, что на
конце вала находится призматическая
шпонка, которая устанавливается на валу
по посадке с натягом и после установки
не должна удаляться. При сборке и
разборке узла, подшипник должен свободно
одеваться и сниматься через шпонку, то
есть должно выполняться следующее
условие
dп dк +2 (h – t1) =36+2*(8-3,3)=45,4
Принимаем dп=50 (кратно 5)
















 t1 h
t1 h

 dk
dk
 dп
dп











 Рис. 2
Рис. 2
d |
D |
B |
r |
50 |
90 |
20 |
2 |
Выбираем подшипник 1210 ГОСТ 28428-90 легкой серии шариковый радиальный сферический двуядерный.
Такой же подшипник будет установлен в точке 5. Для выбранного подшипника, имеющего наружный D=90, выбираем корпус УМ90 и глухую крышку ГН90 . В манжетные крышки подбираем манжеты (рис. Тип1)
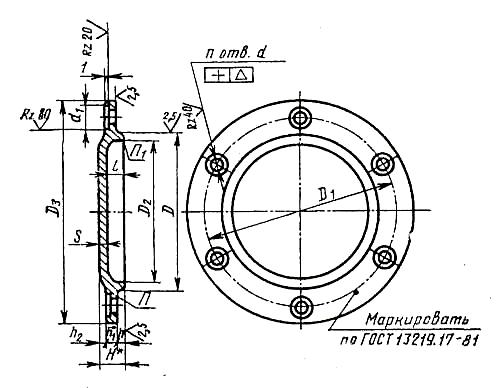 Крышка
торцовая глухая низкая
Крышка
торцовая глухая низкая
D |
D1 |
D2 |
D3 |
B |
d |
d 1 |
n |
H |
h |
h 1 |
h 2 |
l |
s |
r |
r 1 |
90 |
110 |
80 |
- |
125 |
11 |
20 |
4 |
16 |
5 |
7 |
4 |
10 |
6 |
80 |
12 |