

Таким образом получаем, что установившаяся ошибка для данного случая равна 0.
2) при подаче на вход равномерного входного сигнала получим:
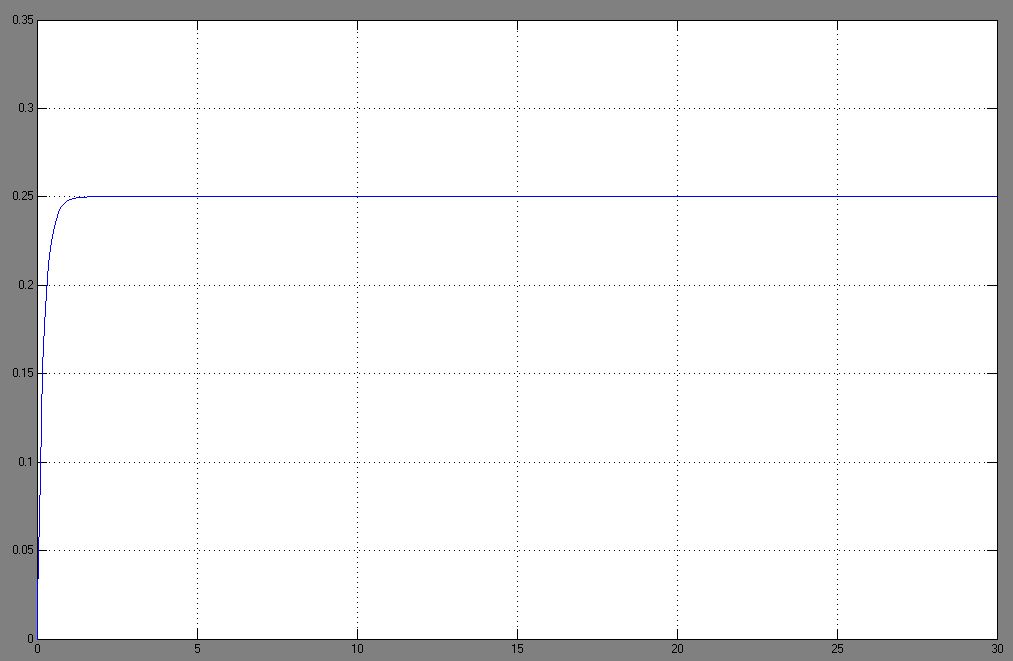
Следовательно при
подаче на вход равномерного входного
сигнала, установившееся значение ошибки
равно const,
а именно
![]() .
.
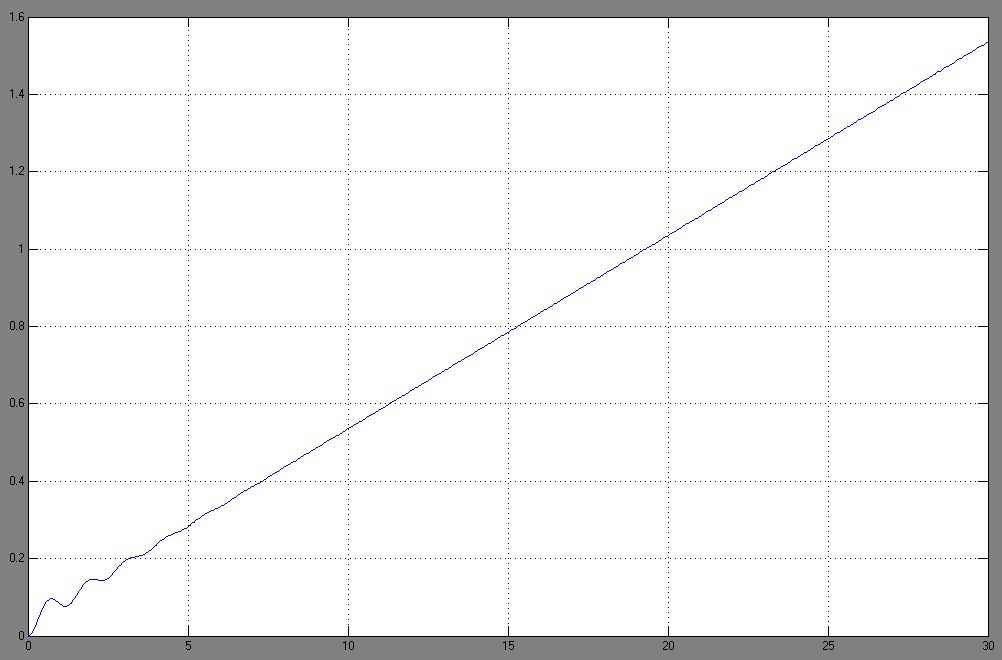
3) при подаче на вход равноускоренного входного сигнала получим:
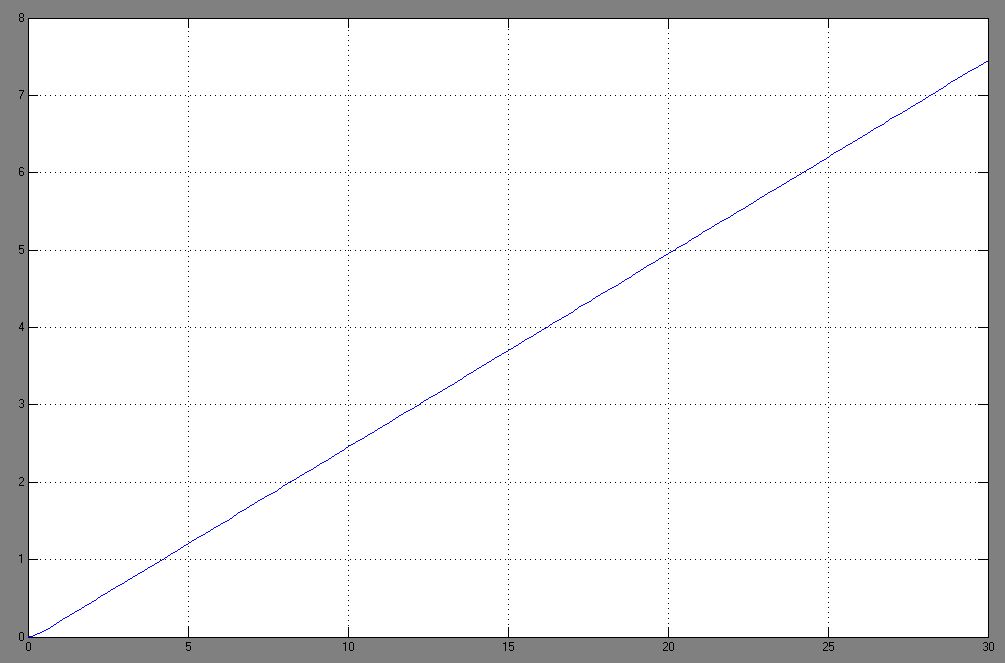
В данном случае ошибка представляет собой линейно-нарастающую функцию времени.
4) при подаче на вход синусоидального сигнала получим:
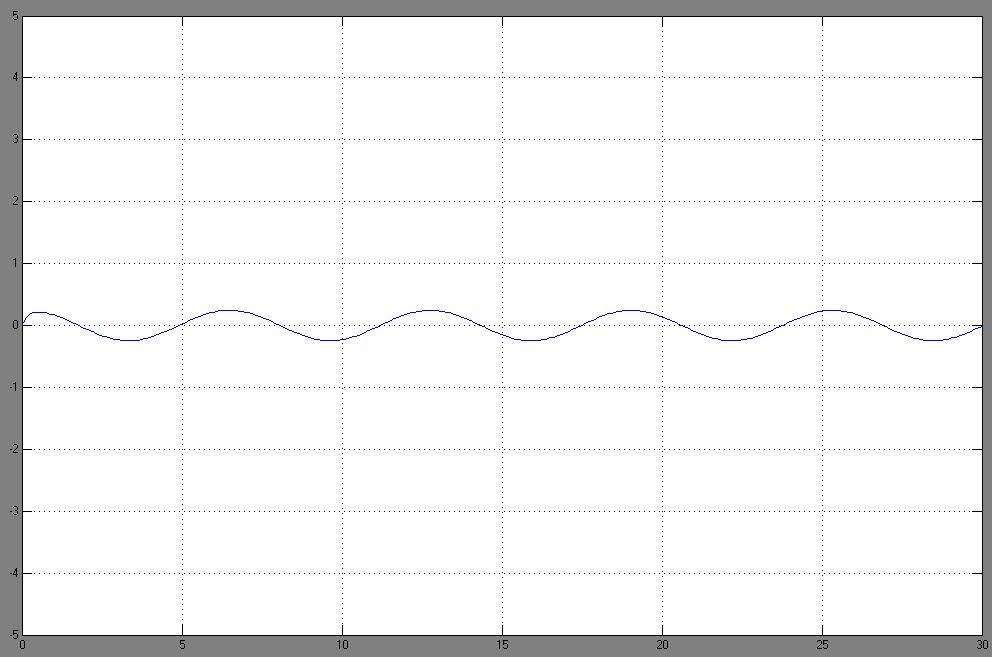
Следовательно, при подаче на вход синусоидального сигнала, установившаяся ошибка также представляет собой гармоническую функцию времени.
5) Оценим качество переходного процесса в системе при ступенчатом входном сигнале . Определим время регулирования и перерегулирование путем моделирования работы системы. Получим косвенную оценку качества переходного процесса с помощью интегрального квадратичного критерия .
Время регулирования равно 0,8 секунды, перерегулирование 0, интегральный квадратный критерий равен 0,1548.

6Б) Исследуем систему с обратной связью по ускорению.
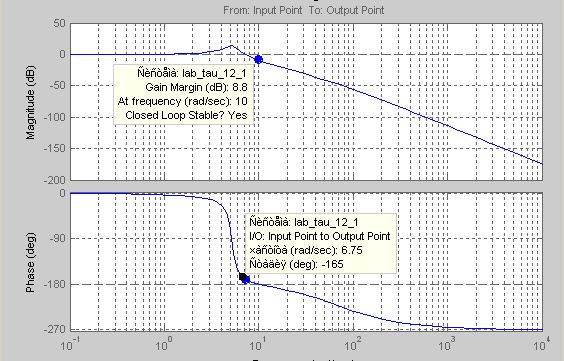
Логарифмические амплитудно- и фазочастотные характеристики, построенные с помощью пакета Control ToolBox, будут иметь следующий вид:
1) при подаче на вход системы единичного ступенчатого сигнала ошибка имеет следующий вид:

Таким образом получаем, что установившаяся ошибка для данного случая равна 0.
2) при подаче на вход равномерного входного сигнала получим:

Следовательно при
подаче на вход равномерного входного
сигнала, установившееся значение ошибки
равно const,
а именно
![]() .
.
3) при подаче на вход равноускоренного входного сигнала получим:
В данном случае ошибка представляет собой линейно-нарастающую функцию времени.
4) при подаче на вход синусоидального сигнала получим:

Следовательно, при подаче на вход синусоидального сигнала, установившаяся ошибка также представляет собой гармоническую функцию времени.
5) Оценим качество переходного процесса в системе при ступенчатом входном сигнале . Определим время регулирования и перерегулирование путем моделирования работы системы. Получим косвенную оценку качества переходного процесса с помощью интегрального квадратичного критерия .
Время регулирования равно 3,25 секунды, перерегулирование 74%, интегральный квадратный критерий равен 0,5364.

7) При введении дополнительной ООС по скорости добротность скорректированной системы уменьшается по сравнению с добротностью исходной СС. Это означает, что снижается и точность СС. Зато при введении дополнительной ООС по скорости увеличиваются запасы устойчивости системы.
При введении дополнительной ООС по ускорению добротность скорректированной системы равна добротности исходной СС, а также увеличиваются запасы устойчивости системы. Это означает, что при введении дополнительной ООС по ускорению, увеличивается и точность, и устойчивость системы. Таким образом, этот вариант коррекции наиболее предпочтителен, хотя и сложнее предыдущего в реализации.
Лабораторная работа № 2. Анализ линейной следящей системы при различных законах управления.