

Уравновешивание вращающихся масс.
При движении механизма в кинематических парах кроме статических возникают дополнительные усилия, так называемые динамические давления. Эти давления, будучи переменными по величине и направлению, являются причиной вибраций отдельных звеньев механизма. Возникающие при движении механизма динамические давления увеличивают силы трения в точках опоры вращающихся валов, увеличивают износ подшипников и создают в отдельных частях механизма добавочные напряжения. Поэтому в процессе проектирования механизмов ставится задача полного или частичного погашения указанных динамических давлений. Эта задача называется задачей об уравновешивании масс механизмов или об уравновешивании сил инерции механизмов.
Звено механизма является уравновешенным, если главный вектор и главный момент сил инерции его материальных точек равны нулю. Каждое звено механизма в отдельности может быть неуравновешенным. Однако даже при неуравновешенных звеньях механизм в целом может быть уравновешен полностью или частично. Для этого в первом случае необходимо, чтобы главный вектор и главный момент относительно произвольного центра приведения динамических (возникающих от сил инерции) опорных реакций фундамента механизма были равны нулю, во втором случае не превосходили определенных, наперед заданных величин. Поэтому проблему уравновешивания сил инерции в механизмах можно разделить на две задачи: 1) об уравновешивании давлений в кинематических парах механизма и 2) об уравновешивании давлений механизма в целом на фундамент.
Большое практическое значение имеет уравновешивание вращающихся звеньев. Даже незначительная неуравновешенность (дисбаланс) быстро вращающихся роторов турбогенераторов и электродвигателей большой мощности вызывает большие динамические давления на подшипники.
Задача об уравновешивании вращающихся тел заключается в таком подборе их масс, который обеспечил бы полное или частичное погашение добавочных инерционных давлений на опоры.
Уравновешивание вращающихся звеньев
В современном спортивном моделизме большое распространение получили механизмы, имеющие быстровращающиеся звенья, так, например, широко применяются электродвигатели с числом оборотов от 1500 до 12000 об/мин и более, модельные двигатели внутреннего сгорания 2000÷15000 об/мин и более и т. д. При таких скоростях силы инерции могут достигать очень больших величин и во многих случаях превосходят внешние силы.

Рис. 9.8 - К определению силы инерции ротора
В качестве примера рассмотрим вал электродвигателя (рис. 9.8), вращающийся с числом оборотов, равным 12000 об/мин, и обладающий массой 1 кг. Пусть центр вала смещен на 0,1 мм. Величина силы инерции в этом случае определится как

Таким образом, сила инерции оказалась эквивалентной почти 15 кг, что на порядок превосходит собственную массу ротора.
Рассмотрим общий случай уравновешивания вращающегося звена, когда с валом А жестко связаны заданные массы m1, m2 и m3 (рис. 9.9 а).
Пусть центры масс m1, m2 и m3 расположены в плоскостях T1, T2 и Т3, перпендикулярных к оси вращения на расстояниях ρ1, ρ2 и ρ3. Величины центробежных сил инерции, развиваемых этими массами

Построим силовой многоугольник (рис. 9.9 б). Так как величины сил Ри1 ,Ри2 и Ри3 пропорциональны произведениям масс m на соответствующие расстояния ρ, то вместо самих сил можно откладывать в силовом многоугольнике произведения m1ρ1, m2ρ2 и m3ρ3, являющиеся статическими моментами масс относительно оси вращения. Вектор mρ пропорционален величине уравновешивающей силы
U = mϖ2p.
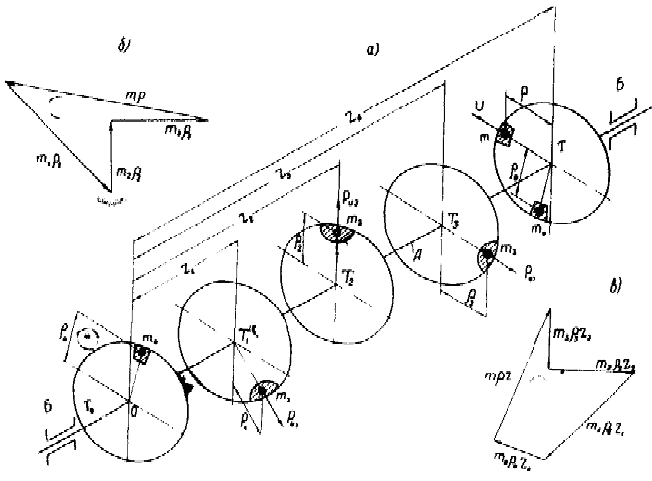
Рис. 9.9 - К уравновешиванию вращающегося звена:
а - вал с жестко связанными с ним массами, б - многоугольник сил, в - многоугольник моментов
Уравновешивающая масса m может быть установлена в любой точке по длине вала и на любом расстоянии ρ от его оси вращения в направлении вектора mρ. Необходимо только, чтобы произведение mρ удовлетворяло плану сил, построенному на Рис. 9.9 б. В рассматриваемом случае центр массы m расположен в плоскости Т. Установкой противовеса уравновешиваются нагрузки на подшипник Б от результирующей силы инерции. Учитывая, что каждая из сил Ри1, Ри2, Ри3 и U эквивалентна такой же силе, приложенной в точке О и некоторой паре (M1, М2, М3 и M), получим, что звено находится под действием только главного момента сил инерции. Определим величины моментов
|
|
Построим многоугольник моментов (Рис. 9.9 в). Так как плоскости действия всех пар содержат ось вращения, то многоугольник моментов лежит в плоскости, перпендикулярной к этой оси. Учитывая, что величина ϖ2 в уравнении входит в виде постоянного множителя, вместо самих векторов M1, M2, М3 и М можно откладывать в многоугольнике моментов произведения m1p1z1, m2p2z2, m3p3z3 и mpz. Замыкающий вектор m0z0p0 (рис. 9. 9в) определит величину момента и плоскость действия уравновешивающей пары М0.
М0= m0ϖ2p0z0
Уравновешивающие массы m0 могут быть в этой плоскости установлены в любых точках вала. В качестве плоскостей установки уравновешивающих грузов массой m0 выберем плоскости Т и То. Тогда при заданном расстоянии z0 между этими плоскостями необходимо подобрать такие значения масс m0 и расстояния р0, чтобы удовлетворялось последнее равенство. Одна из масс m0 устанавливается так, чтобы ее центр находился в плоскости Т0, а центр другой массы m0 — в плоскости Т.
Таким образом, установкой двух противовесов массы m0 и одного противовеса массы m достигается полное уравновешивание всех масс, закрепленных на валу А. Так как в плоскости Т массы m0 и m можно заменить одной массой, то полное уравновешивание масс, закрепленных на валу, может быть достигнуто установкой двух противовесов, центры масс которых лежат в двух произвольно выбранных плоскостях.
Правильно спроектированная с точки зрения полного уравновешивания деталь все же может иметь некоторую неуравновешенность вследствие неоднородности материала, неточности обработки и т. д. При уравновешивании вращающегося звена, имеющего небольшие относительные размеры вдоль оси вращения, достаточно добиться того, чтобы был равен нулю главный вектор сил инерции материальных точек звена. Такое уравновешивание обычно называют статической балансировкой.
Для выявления статической неуравновешенности тело располагают на призмах (Рис. 9.10) так, чтобы оно могло свободно поворачиваться. Если тело в каком-то положении остается неподвижным, то либо оно статически уравновешено, либо случайно центр масс оказался под осью вращения О в положении S0.
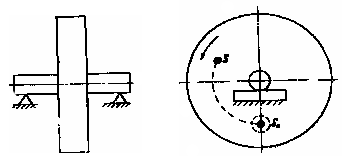
Рисунок 9.10 – К понятию о статической балансировке

Рисунок 9.11 - Схема статической балансировки:
а - установкой противовеса, б - удалением лишнего материала
Динамическую неуравновешенность звена нельзя обнаружить при статической балансировке, так как после устранения статической неуравновешенности тело может оставаться неуравновешенным динамически. Динамическая неуравновешенность может быть представлена двумя равными массами m, расположенными в двух произвольно выбранных плоскостях I—I и II—II по разные стороны от оси вращения (Рис. 9.12)
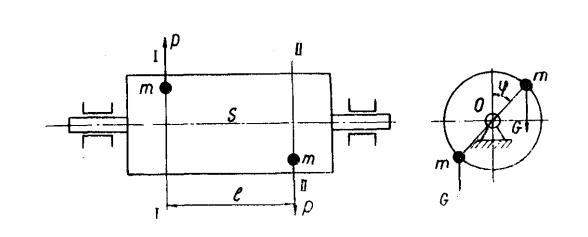
Рис. 9.12 - К понятию динамической балансировки.
При вращении тела силы инерции этих масс взаимно погашаются, но образуют пару сил с моментом М = Риl. При повороте тела на любой угол φ силы веса G масс создадут относительно оси вращения О равные и противоположные моменты. Поэтому тело в любом положении будет находиться в безразличном равновесии.
Отсюда следует, что динамическая неуравновешенность может быть выявлена только при вращающемся теле.
При полном уравновешивании (балансировке) добиваются равенства нулю главного вектора и главного момента сил инерции материальных точек звена.